
Установившиеся
ошибки при гармоническом воздействии
определяются частотными характеристиками
замкнутой системы, которые были
получены выше в § 2.4.
Частотные
характеристики замкнутой системы,
построенные для регулируемой величины
х
по возмущающему воздействию (см. в
конце § 2.4), будут целиком определять
установившуюся
синусоидальную ошибку
по амплитуде и по фазе
![]()
где
ω
— частота колебаний возмущающего
воздействия
![]()
(с
единичной амплитудой).
Что
касается основных частотных характеристик
![]()
построенных
в § 2.4 по главной передаточной функции
замкнутой системы, то они включают в
себя всю информацию об установившемся
слежении за синусоидальным задающим
воздействием
![]()
Поэтому,
как показано на рис. 3.3, а
и б
(соответственно для систем с астатизмом
и без него), установив-

шаяся
ошибка
воспроизведения амплитуды гармонического
задающего воздействия определится
заштрихованными частями ординат.
Заметим, что ошибка
в амплитуде при
ω=0
представляет
собой статическую ошибку
системы, так как нулевая частота
соответствует постоянной величине
входного сигнала.
Фазовая
частотная характеристика φз(ω)
(рис. 3.3, в) представляет собой установившуюся
ошибку, выражающуюся в сдвиге фазы
на выходе
![]()
по
отношению к входному воздействию (3.21).
Амплитудная
частотная характеристика Аз(ω)
обычно падает при дальнейшем увеличении
частоты, причем
![]()
В
результате получается ограниченный
диапазон частот ωп
(см. рис. 3.3), в котором ошибка воспроизведения
амплитуды
![]()
не
превышает допустимого значения. Этот
диапазон частот 0 < ω
< ωп
определяет полосу
пропускания
данной системы.
Полоса
пропускания является важным показателем
точности системы. Она характеризует
ограничение возможностей системы в
воспроизведении быстро меняющихся
сигналов. Это связано со степенью
инерционности системы. При необходимости
для снижения инерционности

в
систему вводятся корректирующие
устройства, рассматриваемые ниже в
главе 6.
Для
астатических
систем
существует приближенная формула
вычисления ошибки при гармоническом
воздействии на рабочих частотах.
Рабочие частоты систем управления
ωp
лежат обычно ниже (левее) первой
сопрягающей частоты ω1
(рис. 3.4), где |W(
jωp)|
> 1 и само значение ωp
сравнительно невелико. Поэтому для
астатической системы с передаточной
функцией разомкнутой цепи
![]()
где
L1
(s)—многочлен
но степеням s
со свободным членом 1, будем иметь
![]()
а
для ошибки ε
в замкнутой системе
![]()
т.
е. при воздействии (3.21) амплитуда ошибки
будет равна
![]()
Здесь
наглядно видно, что и при гармоническом
воздействии ошибка в первом приближении
обратно пропорциональна общему
коэффициенту усиления разомкнутой цепи
К,
т. е. добротности системы, как это было
и для всех постоянных ошибок (§ 3.2).
Наконец,
необходимо отметить, что часто при
проектировании
и испытании
систем управления пользуются синусоидальным
задающим сигналом и в том случае, когда
требования к системе поставлены по
величинам максимальной скорости и
максимального ускорения входного
воздействия, которые должны воспроизводиться
следящей системой.
В
этом случае, при подаче синусоидального
сигнала g = a
sin ωt
скорость и ускорение будут
![]()
Следовательно,
![]()
Отсюда
вычисляются частота ω
и амплитуда а
синусоидального задающего воздействия,
при котором получаются требуемые
максимальные скорость и ускорение, а
именно:
![]()
Тогда
эти значения ω
и а
принимаются за расчетные рабочие
значения частоты и амплитуды для данной
системы. Ошибка на этой частоте при
данной амплитуде определится по формуле
![]()
Ниже
в главе 6 мы воспользуемся этими
соотношениями при решении задачи
синтеза в процессе проектирования
системы.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
3), введем здесь определение статической ошибки, астатизма и коэффициентов ошибок, а танисе ошибок при гармоническом воздействии. Ошибку импульсной системы мы условились обозначать 0 (см. рис. 10.5). Имея в виду, что передаточная функция замкнутой системы для ошибки равна Ф «‘) 1;ж,*(. (10.41) т (+и’ (4 (+гг (И Это и будет статическая ошибка импульсной системы д,ч.
Астатической импульсной системой будет такая, у которой передаточная функция разомкнутой цепи имеет полюс а= 1 (у=0), т. е. установившуюся ошибку д„, при постоянной величине внешнего воздействии д(1) = бе можно вкошслить по фор- муле где И»,(з) пе имеет полюсов в точке з=1. Передаточная функция замкнутой системы по ошибке в этом случает будет Фе (з) =(з — 1)Фо,(з), (10.43) где ч Фоо(х) = нвляется функцией, пе имеющей пулей при э= 1. В такой астатической системе при внешнем воздействии вида я(з) = яз+ рг установившаяся ошибка получит выражение 1) га+лг зг (1о 44 ж н, ()+ 1 ~,*(1) ° Это постоянпан величина скоростной ошибки О,„астатнческой системы. Статическая же ошибка отсутствует.
Аналогично получается дважды астатическая импульсная система, если передаточнан функция разомкнутой цепи атой системы имеет двойной ползос в точке э=1 (д= О), Тогда появится постоянная ошибка только по ускорению изменения внешнего воздействия д(Г). Надо иметь в виду, что в импульсных системах могут возникать малые колебания внутри периода повторения сигнала в установившемся режиме. Определим коэй1фициенты ошибок для импульсной системы аналогично тому, как это делалось для пепрерывньтх систем (з 3.4). Разложим в рнд Тейлора передаточную функцию замкнутой импульсной системы для ошибки в окрестности тош1и з = 1: Фо,(з) = «~ — (з — 1)», ь е где сь = „* ~ = ~’ т ( — 1) йе[т).
(10.45) л~ф’*(э) ! ь ь ~~=о Здесь й~[ш1 при т=п есть весовая функция системы по ошибке. Так определяются коэффициенты ошибок сз, сь сэ, … При этом, например, первые три козффици- ента имеют вид с =- Фе*(1) = Х йе!т] м=о оФс (о) ~ с = = — У т)оо [т] ло ]я=у о о 1 =Х ( — оо! 1. ооФ~ (о) ы=о Передаточная фушоцня импульсной системы согласно формулам (10.41) и (10.39) имеет вид отношения мно- гочлепов ~; (о) ‘(‘» ()+~~о (о) Поэтому вместо разложения в ряд Фурье те же коэффициенты с, можно получить путем деления многочлена числителя на знаменатель. Этот способ и рекомендуется использовать как более простой для практических расчетов.
Чтобы определить выражение для ошибки с использованием этих коэффициентов, обратимся к формуле (10.3), записав ее в виде дуо [п] = ~~~’, у [и — т] йо [т]. (10.46) Подставив их в выражение (10.46), после выкладок по- лучаем 0уо[п] = ~~~э~ о( Л о [и В]~ о=о (10.47) где с, определяются формулой (10.45). Фигурирующую здесь решетчатую функцию д[п — т] вы- разим через ее разности соответствуоощего порядка для разных значений т: л [п — 1] = я [п] — Ад [и — 1], д [п — 2] = и [и] — 2Лд [п — 1] + Лед [и — 2], у [и — 3] = у[п] — Зйй[п — 1]+ 3йоа[п — 2] — Аой[п — 3], Например, если я (и] = ао+ а,п + агпг, (10.48) то соответствующие разности будут Лф (и — 1) = а! — аз + 2агп, Лд (п — 2)= Л(Лд(п — 1)) = Л(а~ — аг+ 2аг(п — 1) ) = 2аг, далее Лц(п — й) =0 при всех Ь Рз 3.
С этими значениями разностей формула (10.47) дает 9„,(п) = пгсоаг+ + п(оса~+ 2агс~)+ соао+ с,(а~ — аг)+ сгаь (10 49) Покажем определение коэффициентов ошибок па при- мере импульсной системы, имеющей передаточную функ- цию разомкнутой цепи И», (з) = +,, (10.50) (з — 1) (1 + з + з’)’ з если внешнее воздействие имеет виду(1) = 1+ 1+ 2 . Найдем передато шую функцию замкнутой системы для ошибки (з — 1) (з + 2з + 3) (з — 1) (з + 2з + 3) + з + 1 Для деления числителя на знаменатель здесь удобно ввести замену з — 1=ь. После выкладок получаем оз+ 4~о+ со 4з+ 44з+ 14+ 2 ‘ Деление мпогочлеиов по обычному правилу алгебры дает результат Фм (~) = 3~ — 8,5~о+ 24,25~~+… Отсюда следуют значения коэффициентов ошибок со=О; с~ =3; сг= — 8,5 2(= — 17; сз = 24,25 .
3( = 145,5; .. Впавшее воздействие пам задано в виде (10.48) при значениях ао = 1, а~ = 1, а = —. Тогда по формуле (10.49) с найденными здесь коэффициентами с; опреде- ллем ошибку 0„, 1пу = и . 2аес~ + (а~ — аг) с~+ агсг = Зп — 7. Здесь отсутствует статическая ошибка (сэ=,0), ибо передаточная функция разомкнутой цепи (Ю.50) имеет полюс г = 1 (астатнческая система). В целом ошибка включает постоянную составляющ1по ( — 7) по скорости, пропорциональную времени (Зп) по ускорению измепения внешнего воздействия. Перейдем теперь к оишбнам импульсной системы при гармоническом воздействии. Внешнее свнусоидальное воздействие д(У)=аз1поу преобразуется па входе в решетчатую функцию (10.15), а именно д 1п) = а зш оп. При этом установившаяся ошибка в замкнутой системе будет 0„, = Ав яп(оп+ ~р,), где Аа = а ~ сРе(Уо) ~, ив =- ага Фс(Уо).
(Ю.51) Используем логарифмические частотные характеристики разомкнутой цепи, получаемые с крименепием и~-преобразования (10.26) и (10.29), в виде 1,ше (ов) =- 20 1я ) И’ (ув*) (, ср* (оа) = агд ИУ„(уо*), как зто было проиллюстрировано на примерах в $ Ю.З. Учитывая, что аналогично рис. 3.4 обычно на рабо- Э .
Э чей частоте ~ ИУ„(уор) ~ >> 1, получим в соответствии с формулой (10.41 ) следующее выражение: 201я Ае = 20 1я а — 1лп ~ И’„(уо~) ~, сро = — агй И» (уев)- Как было установлено в $ 10.3, в низкочастотной области (в которой и лежит значение ор) приближенно выполняется равенство о — о Т (1052) т. е. имеется совпадение псевдочастоты о* с частотой о передаточной функции приведенной непрерывной части импульсной системы. Позтому для определения ошибки в атой области можно польаоваться непосредственно обьгчной логарифмической частотной характеристикой приведенной непрерывной части, а именно считать, что 201яА~ -201яа — Ьш! И~()а„) 1, ~рв= — агяй (ую„).
Следовательно, в первом приближении установившаяся ошибка импульсной системы при гармоническом воздействии (низкочастотном) может быть вычислена как установившаяся ошибка обычной непрерывной системы, получаемой замыканием отрицательпой обратной связью приведенной непрерывной части этой системы. Обратимся далее к изложению принципов воррекпии импульсных систем. Введение в систему корректирующих устройств бывает, как мы знаем, необходимо, чтобы в результате этого система удовлетворяла заданным требованиям по точности и по качеству процессов управления, в том числе переходных процессов.
Поэтому рассмотрим спачала эти требования. Простейшим требованием является обеспечение заданного запаса устойчивости (т. е. определеппой меры удаления от границы устойчивости). В частотных оценках это, как известно, аапас по амплитуде и запас по фазе, вычислнемые толю таким же образом, как и для непрерывных систем (см. з 5.2), по частотным характеристикам импульсных систем, рассмотренным вьппе в данной главе. Требование заданной точности может вьгражаться различными способами. В частотных подходах анализируется обычно гармоническое воздействие д(Ц= а„з(п со,3.
Из формулы (10.51) следует, что 0:~,! РИ1,)!. Коли задано, что ошибка не должна превьппать определенного допустимого значения 6„„, то частотная характеристика системы должна удовлетворять требованию ! рс(й,)!» — «. Но для рабочей частоты ю„расположенной в пизкочастотной области, 1И’*(ув„) ! .Л1. Тогда в соответствии с (10.41) последнее условие запишется в виде требования к частотной характеристике разомкнутой цепи ! ру*(ую,) !) — ‘, слов’ ($0.53) а в логарифмической форме 1ш~И’„(усср)):~20 1л „Р .
(10.54) доп Связь между псевдочастотой оса и безразмерной частотой со = ооТ определяется формулой (10.27). Учитывая же, что для низкочастотной области справедливо равенство (10.52), условие (10.54) можно записать и как требование к логарифмической частотной характеристике приведенной непрерывной части системы: 1 ш ( И’ (уоо ) ~ ) 20 1я — Р йдоп (10.55) Выбор типового гармонического воздействия я(х)= = ар э1н оса, которое следует заложить в проектирование системы, может исходить из заданных требований максимальной рабочей скорости я , и ускорения Р , входного воздействия, так же как и для непрерывных систем, в виде (6.18), т. е. гмнх и р— Гаьах Ехннх Ор=. 3 Енонх Вычислив вн и а по задаппым д„и д, реализуем затем требование (Й53), (10.54) или (10.55).
По аналогии с формулой (6.20) здесь также вводится требование к значению общего коэффициента усиления Гмах рааомкпутой цепи системы К=-‘- .— как одно из услойдоп вий достижения заданной точности проектируемой системьь Требования к качеству переходного процесса в импульсных системах аналогично непрерывным выражаются в допустимых зпачепиях перерегулирования о и времени переходного процесса 1„, которое может быть вырагп жено в относительных единицах па = —, где Т вЂ” период т’ чередования импульсов.
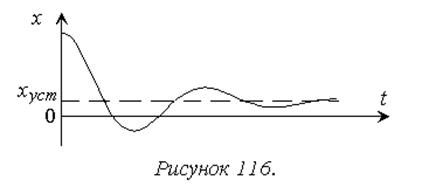
Лекция 17. Расчет установившейся ошибки в системах управления.
Структурные признаки астатизма
Установившейся (статической) ошибкой называют
постоянное значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании переходного процесса: ![]() , рисунок 116.
, рисунок 116.
Очевидно, установившаяся ошибка зависит от законов
изменения и численных характеристик входных сигналов системы. Поэтому при ее
определении принято рассматривать так называемые типовые входные сигналы,
законы изменения которых составляют степенной ряд относительно времени.
Например, для задающего воздействия:
![]() ,
, ![]() ,
,  и так
и так
далее.
При наличии нескольких воздействий на линейную систему
для определения xуст используется
принцип суперпозиции – реакция линейной системы на совокупность входных
сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в
отдельности:
 , где
, где
каждое слагаемое, или составляющая сигнала ошибки, ![]() определяется
определяется
для i-го входного сигнала при условии, что остальные
тождественно равны нулю. Такой подход полностью соответствует определению
передаточной функции и позволяет выполнять расчет установившейся ошибки на
основе структурной схемы системы.
Рассмотрим порядок расчета установившейся ошибки на
следующем достаточно общем примере (рисунок 117).
В соответствии с принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде суммы трех составляющих ![]() .
.
Изображение по Лапласу ошибки от задающего воздействия
получают через передаточную функцию замкнутой системы по ошибке ![]() при известном изображении задающего
при известном изображении задающего
воздействия G(s):
![]() , где
, где
F(s) – основная передаточная функция замкнутой системы.
Для структурной схемы на рисунке 117
 , где
, где ![]() — передаточная функция
— передаточная функция
разомкнутой системы, или прямой цепи системы, для рассматриваемого примера.
Непосредственно для расчета
установившегося значения ошибки от задающего воздействия используют теорему о
конечном значении для преобразования Лапласа:
![]()
В результате:
 .
.
Изображение по Лапласу ошибки от возмущающего
воздействия получают через передаточную функцию замкнутой системы по ошибке от
возмущения ![]() при известном изображении возмущающего
при известном изображении возмущающего
воздействия F(s):
![]() , где
, где
Ff(s) –передаточная функция замкнутой системы по
возмущающему воздействию,
 ;
;
Wf(s)
– передаточная функция разомкнутой системы по возмущению (передаточная функция
участка прямой цепи системы от точки приложения возмущающего воздействия до
выхода системы).
Для структурной схемы на рисунке 8 необходимо
учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
 ,
,
 .
.
Для f2:
![]() ,
,
 ,
,
 .
.
Расчет упрощается для
системы с единичной отрицательной обратной связью (рисунок 118):
 ,
,
 , где k=k1k2k3 – коэффициент передачи
, где k=k1k2k3 – коэффициент передачи
разомкнутой системы.
Найдем установившуюся ошибку
для некоторых типовых вариантов задающего воздействия.
При ![]() получим:
получим:
![]()
 .
.
При ![]() получим:
получим:
 .
.
При получим:
 .
.
Если установившаяся ошибка
тождественно равна нулю при каком-либо типовом варианте входного сигнала,
независимо от его численных характеристик, систему называют астатической по
рассматриваемому входному сигналу.
Количество типовых вариантов
входного сигнала – членов степенного ряда, при которых установившаяся ошибка
тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система
обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся
ошибку от возмущения f1:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f1.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим
получим
тот же результат.
Отметим, что по возмущению f1 рассматриваемая система
не является астатической. Кроме того, она не в состоянии отработать два последних
варианта входного сигнала.
Рассмотрим установившуюся
ошибку от возмущения f2:
 ,
,
 , где
, где ![]() –
–
коэффициент передачи разомкнутой системы по возмущению f2.
При ![]() получим:
получим:

 .
.
При ![]() получим:
получим:
 .
.
При  получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет
астатизм первого порядка. Она не в состоянии отработать возмущающее
воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина
свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени
звеньев системы не влияют на ее точность.
3. Увеличение значения
коэффициента передачи разомкнутой системы приводит к снижению величины
установившейся ошибки.
Для систем с единичной
отрицательной обратной связью существуют достаточно простые структурные
признаки астатизма.
Рассмотрим структуру,
показанную на рисунке 119.
В общем случае передаточная
функция разомкнутой системы может быть представлена в следующей форме:
 , где l³0.
, где l³0.
Тогда получим:

и для общего вида задающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Результат нахождения этого
предела зависит от соотношения показателей степени:
— при l>v установившаяся
ошибка равна нулю независимо от остальных параметров, то есть имеет место
астатизм;
— при l=v получаем
константу;
— при l<v установившаяся
ошибка стремится к бесконечности, то есть система не в состоянии отработать
входной сигнал.
Учитывая, что минимальное
значение v нулевое,
получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный
признак астатизма по задающему воздействию в системе с единичной отрицательной
обратной связью состоит в наличии нулевых корней в знаменателе передаточной
функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться,
что положительное значение l совпадает
с порядком астатизма.
Для получения признака
астатизма по возмущающему воздействию представим передаточные функции на
рисунке 10 в форме:
 ,
,
 , где l1+l2=l,
, где l1+l2=l,
k1k2=k, m1+m2=m,
n1+n2=n,
причем ![]() и
и ![]() .
.
Тогда получим:

и для общего вида возмущающего воздействия  , которому соответствует изображение
, которому соответствует изображение  ,
,
 .
.
Все вышеприведенные выводы
можно повторить для показателя степени l1.
Таким образом, структурный
признак астатизма по возмущающему воздействию в системе с единичной
отрицательной обратной связью состоит в наличии нулевых корней в знаменателе
передаточной функции участка системы до точки приложения воздействия, или
интегрирующих звеньев на том же участке.