

1 Характеристики
- Готовый ШИМ — контроллер
- Незадействованные выводы для 200 мА приемника или источника тока
- Выбор однотактного или двухтактного режима работы
- Внутренняя схема запрещает двойной импульс на выходе
- Изменяемое время задержки обеспечивает контроль всего спектра
- Встроенный стабилизатор выдает 5 В опорного напряжения с допуском 5%
- Архитектура микросхемы позволяет легко синхронизироваться
2 Применение
- Настольные ПК
- Микроволновые печи
- Источники питания: AC/DC; изолированный; с коррекцией коэффициента мощности; >90 Вт
- Серверы БП
- Солнечные микро-преобразователи
- Стиральные машины классов : Low-End и High-End
- Электровелосипеды
- Источники питания: AC/DC; изолированный; без коррекции коэффициента мощности; <90 Вт
- Датчики дыма
- Преобразователи в солнечной энергетике
3 Описание
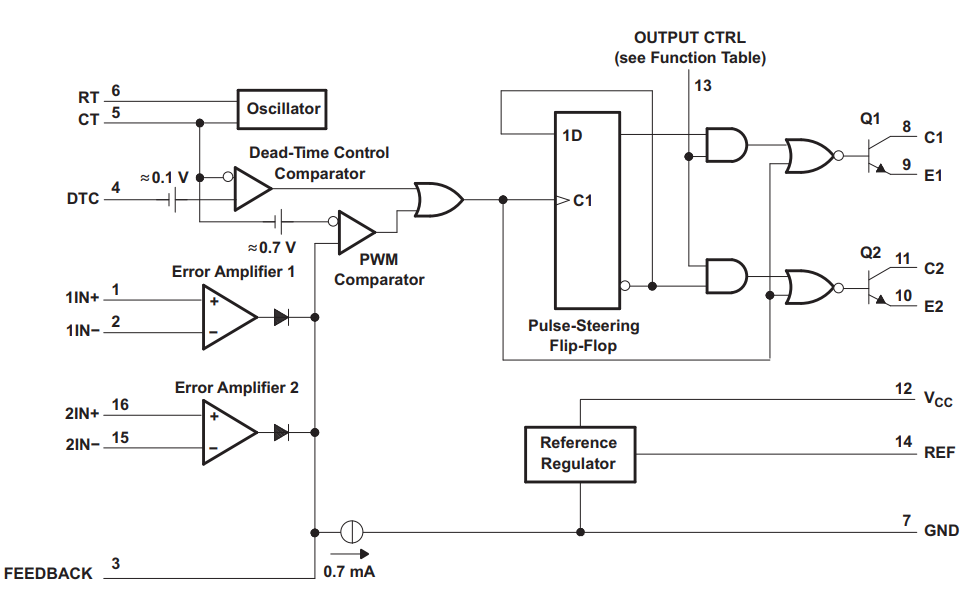
TL 494 включает в себя все функции необходимые для построения схемы управления широтно-импульсной модуляцией (ШИМ) на одном кристалле. Предназначенная в основном для управления питанием, она позволяет адаптировать схему к конкретному применению. TL 494 содержит два усилителя ошибки, внутренний регулируемый генератор, компаратор управления длительностью мертвого времени (DTC), импульсно управляемый переключатель, источник опорного напряжения 5В ± 5%, контроль выходной цепи.
Усилители ошибки выдают синфазное напряжение в диапазоне -0.3 В до Vcc — 2 В. Компаратор мертвого времени имеет фиксированное смещение, что дает 5% временную задержку. Внутренний генератор можно обойти путем отключения вывода RT и подключения пилообразного напряжения к CT, что применяется для общих цепей в синхронизации источников питания.
Независимые выходные формирователи на транзисторах дают возможность подключать нагрузку по схеме с общим эмиттером либо по схеме эмиттерного повторителя. Выходной каскад микросхем TL493/4/5 работает в однотактном или двухтактном режиме с возможностью выбора режима с помощью специального входа. TL494 может работать в однотактном и двухтактном режиме. Архитектура устройства не дает возможности подачи двойного импульса в двухтактном режиме.
TL494C может работать в диапазоне температур от 0°C до 70°C. TL494I работает в диапазоне температур от –40°C до 85°C.
| Серийный номер | Корпус(кол-во выводов) | Размеры |
| TL 494 | SOIC (16) | 9.90 мм × 3.91 мм |
| PDIP (16) | 19.30 мм × 6.35 мм | |
| SOP (16) | 10.30 мм × 5.30 мм | |
| TSSOP (16) | 5.00 мм × 4.40 мм |
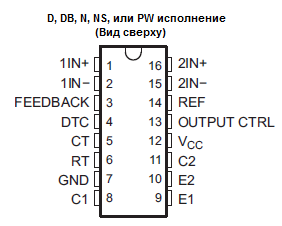
4 Расположение и назначение выводов
| Вывод | Тип | Описание | |
| Название | Номер | ||
| 1IN+ | 1 | I | Неинвертирующий вход усилителя ошибки 1 |
| 1IN- | 2 | I | Инвертирующий вход усилителя ошибки 1 |
| 2IN+ | 16 | I | Неинвертирующий вход усилителя ошибки 2 |
| 2IN- | 15 | I | Инвертирующий вход усилителя ошибки 2 |
| C1 | 8 | O | Коллектор Биполярного Плоскостного Транзистора (БПТ) 1 |
| C2 | 11 | O | Коллектор БПТ 2 |
| CT | 5 | — | Вывод для подключения конденсатора для установки частоты генератора |
| DTC | 4 | I | Вход компаратора мертвого времени |
| E1 | 9 | O | Эмиттер БПТ 1 |
| E2 | 10 | O | Эмиттер БПТ 2 |
| FEEDBACK | 3 | I | Вывод для обратной связи |
| GND | 7 | — | Общий |
| OUTPUT CTRL | 13 | I | Выбор режима работы |
| REF | 14 | O | Опорное напряжение 5В |
| RT | 6 | — | Вывод для подключения резистора для установки частоты генератора |
| VCC | 12 | — | Напряжение питания (+) |
5 Спецификация
5.1 Абсолютные максимальные значения
| Мин. | Макс. | Ед. Изм. | |
| VCC Напряжение питания | 41 | В | |
| VI Напряжение на входе усилителя | VCC + 0.3 | В | |
| VO Напряжение на коллекторе | 41 | В | |
| IO Ток коллектора | 250 | мА | |
| Температура припоя 1,6 мм в течении 10 сек. | 260 | °C | |
| Tstg Температура хранения | –65 | 150 | °C |
5.2 Значения электростатического заряда
| Макс. | Ед. изм. | ||
| V(ESD) Электростатический заряд | Модель человеческого тела (HBM), посредством ANSI/ESDA/JEDEC JS-001, все выводы | 500 | В |
| Модель заряда на устройстве (CDM), посредством JEDEC спецификации JESD22-C101, все выводы | 200 | В |
5.3 Рекомендуемые рабочие значения
| Мин. | Макс. | Ед. Изм. | |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура на открытом воздухе | 0 | 70 | °C |
| -40 | 85 | °C |
5.4 Тепловые характеристики
В рабочем диапазоне температур на открытом воздухе
| Параметр | TL494 | Ед. изм. | ||||
| D | DB | N | NS | PW | ||
| RθJA Полное тепловое сопротивление для корпуса | 73 | 82 | 67 | 64 | 108 | °C/Вт |
5.5 Электрические характеристики
В рабочем диапазоне температур на открытом воздухе, VCC = 15 В, f = 10 кГц
| Параметр | Условия испытаний(1) | TL494C, TL494I | Ед. изм | ||
| Мин. | Тип.(2) | Макс. | |||
| Выходное напряжение (REF) | IO = 1 мА | 4.75 | 5 | 5.25 | В |
| Стабилизация на входе | VCC от 7 В до 40 V | 2 | 25 | мВ | |
| Стабилизация на выходе | IO от 1 мА до 10 мА | 1 | 15 | мВ | |
| Изменение выходного напряжения при температуре | ΔTA от MIN до MAX | 2 | 10 | мВ/В | |
| Выходной ток короткого замыкания(3) | REF = 0 V | 25 | мА |
(1) Для условий указанных как MIN или MAX используются соответствующие значения, указанные в рекомендуемых условиях эксплуатации.
(2) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
(3) Продолжительность короткого замыкания не должна превышать одну секунду.
5.6 Электрические характеристики генератора
CT = 0,01 мкФ, RT = 12 кОм
| Параметр | Условия испытаний(1) | TL494C, TL494I | Ед. изм. | ||
| Мин. | Тип.(2) | Макс. | |||
| Частота | 10 | кГц | |||
| Стандартное отклонение частоты(3) | Все значения VCC, CT, RT, и TA постоянны | 100 | Гц/кГц | ||
| Изменение частоты от напряжения | VCC от 7 В до 40 В, TA = 25°C | 1 | Гц/кГц | ||
| Изменение частоты от температуры(4) | ΔTA — от MIN до MAX | 10 | Гц/кГц |
(1) Для условий указанных как MIN или MAX используются соответствующие значения, указанные в рекомендуемых условиях эксплуатации.
(2) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
(3) Стандартное отклонение является мерой статистического распределения относительно среднего рассчитанного по формуле:
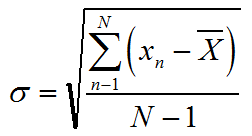
(4) Температурный коэффициент конденсатора и резистора не учитываются.
5.7 Электрические характеристики усилителя ошибки
| Параметр | Условия испытаний | TL494C, TL494I | Ед. изм. | ||
| Мин. | Тип.(1) | Макс. | |||
| Входное напряжение смещения | VO (FEEDBACK) = 2.5 В | 2 | 10 | мВ | |
| Входной ток смещения | VO (FEEDBACK) = 2.5 В | 25 | 250 | нА | |
| Входной ток смещения | VO (FEEDBACK) = 2.5 В | 0.2 | 1 | мкА | |
| Диапазон входного напряжения | VCC от 7 В до 40 В | -0.3 до VCC – 2 | В | ||
| Коэффициент усиления разомкнутой цепи | ΔVO = 3 В, VO = 0.5 В — 3.5 В, RL = 2 кОм | 70 | 95 | dB | |
| Полоса пропускания | ΔVO = 3 В, VO = 0.5 В — 3.5 В, RL = 2 кОм | 800 | кГц | ||
| Коэффициент подавления синфазных сигналов | ΔVO = 40 В, TA = 25°C | 65 | 80 | dB | |
| Выходной ток приемника(FEEDBACK) | VID = –15 мВ до –5 В, V (FEEDBACK) = 0.7 В | 0.3 | 0.7 | мА | |
| Выходной ток источника(FEEDBACK) | VID = 15 мВ до 5 В, V (FEEDBACK) = 3.5 В | -2 | мА |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.8 Выходные электрические характеристики
| Параметр | Условия испытаний | Мин. | Тип.(1) | Макс. | Ед. изм. | |
| Ток коллектора в закрытом состоянии | VCE = 40 В, VCC = 40 В | 2 | 100 | мкА | ||
| Ток эмиттера в закрытом состоянии | VCC = VC = 40 В, VE = 0 | -100 | мкА | |||
| Напряжение насыщения коллектор — эмиттер | Общий эмиттер | VE = 0, IC = 200 мА | 1.1 | 1.3 | В | |
| Эмиттерный повторитель | VO(C1 или C2) = 15 В, IE = –200 мА | 1.5 | 2.5 | |||
| Выходной контроль входного тока | VI = Vref | 3.5 | мА |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.9 Электрические характеристики управления длительностью мертвого времени
См. Рисунок 5
| Параметр | Условия испытаний | Мин. | Тип.(1) | Макс. | Ед. изм. |
| Входной ток смещения (DEAD-TIME CTRL) | VI от 0 до 5.25 В | -2 | -10 | мкА | |
| Максимальная скважность импульсов на каждом выходе | VI (DEAD-TIME CTRL) = 0, CT = 0.01 мкФ, RT = 12 кОм | 45% | — | ||
| Входное пороговое напряжение (DEAD-TIME CTRL) | Нулевой коэффициент заполнения | 3 | 3.3 | В | |
| Максимальный коэффициент заполнения | 0 |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.10 Электрические характеристики ШИМ — компаратора
См. Рисунок 5
| Параметр | Условия испытаний | Мин. | Тип.(1) | Макс. | Ед. изм. |
| Входное пороговое напряжение (FEEDBACK) | Нулевой коэффициент заполнения | 4 | 4.5 | В | |
| Входной ток приемника (FEEDBACK) | V (FEEDBACK) = 0.7 В | 0.3 | 0.7 | мА |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.11 Общие электрические характеристики устройства
| Параметр | Условия испытаний | Мин. | Тип.(1) | Макс. | Ед. изм. | |
| Ток потребляемый в режиме ожидания | RT = Vref, Все остальные входы и выходы отключены | VCC = 15 В | 6 | 9 | мА | |
| VCC = 40 В | 10 | 15 | ||||
| Средний потребляемый ток | VI (DEAD-TIME CTRL) = 2 В, | 7.5 | мА |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.12 Коммутационные характеристики
TA = 25°C
| Параметр | Условия испытаний | Мин. | Тип.(1) | Макс. | Ед. изм. |
| Время нарастания | Схема с общим эмиттером | 100 | 200 | нс | |
| Время спада | 25 | 100 | нс | ||
| Время нарастания | Схема эмиттерного повторителя | 100 | 200 | нс | |
| Время спада | 40 | 100 | нс |
(1) Все типичные значения, за исключением изменения параметров температуры, установлены при TA = 25°C.
5.13 Типовые характеристики
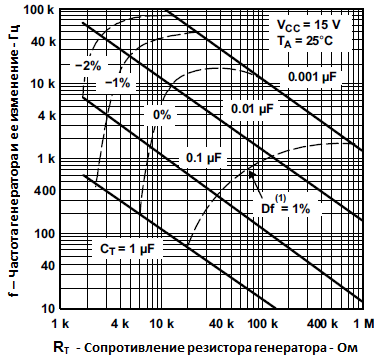
Рис. 1 Частота колебаний генератора и ее отклонение от сопротивления резистора генератора |
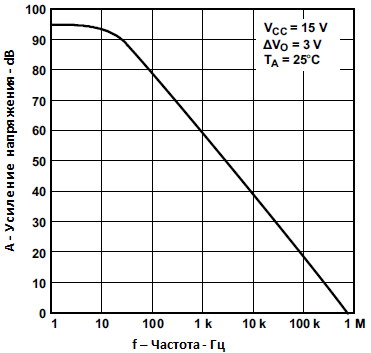
Рис. 2 Усиление напряжения от частоты |
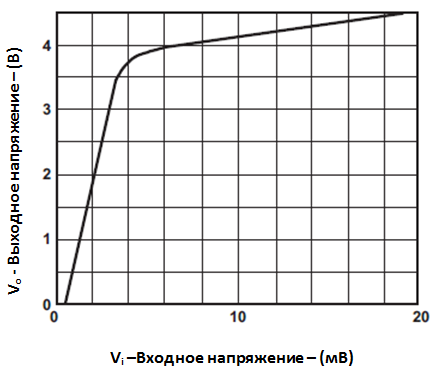
Рис. 3 Усилитель ошибки — передаточные характеристики |
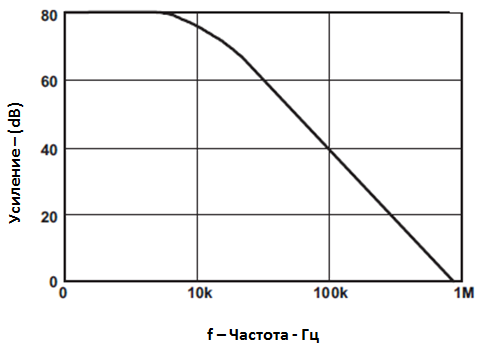
Рис. 4 Усилитель ошибки — график Боде |
6 Измеряемые параметры
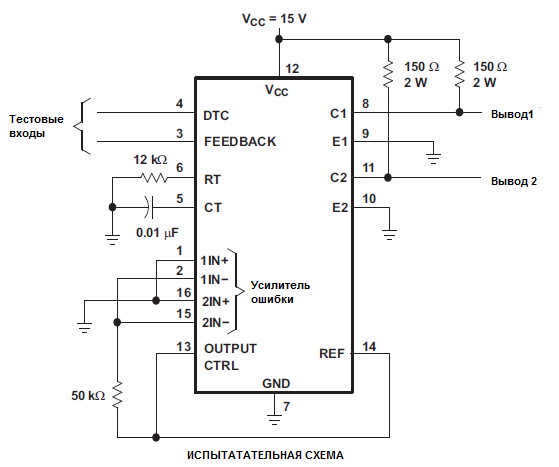
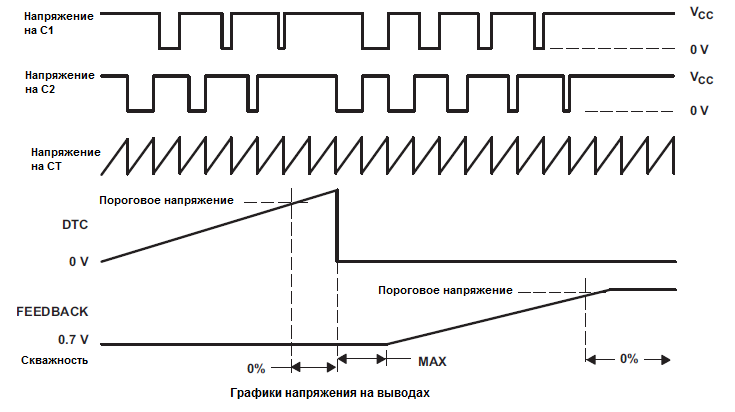
Рис. 5 Проверка работы цепи и осциллограммы
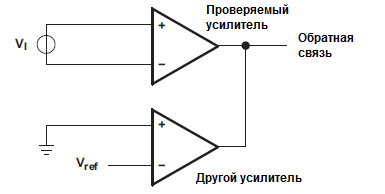
Рис. 6 Характеристики усилителя
Прим. А: CL включает датчик и управляющую емкость
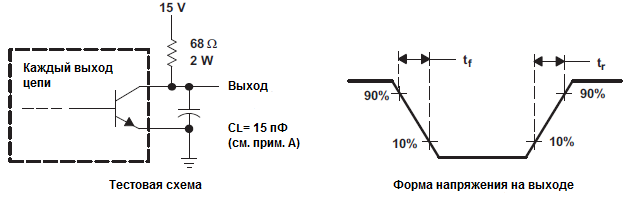
Рис. 7 Схема включения с общим эмиттером
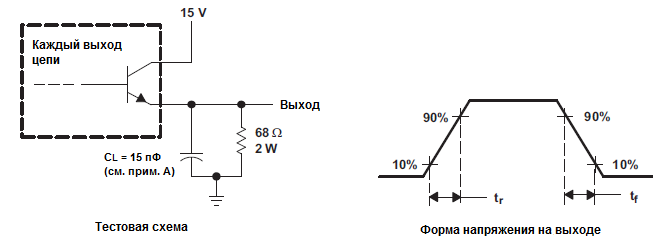
Прим. А: CL включает датчик и управляющую емкость
Рис. 8 Схема включения эмиттерного повторителя
Описание работы
Обзор
TL494 не только включает в себя основные блоки, необходимые для управления импульсным источником питания, но также решает многие основные проблемы и уменьшает количество дополнительных схем, требуемых при проектировании устройства. TL494 — это схема управления с фиксированной частотой и широтно-импульсной модуляцией (ШИМ). Модуляция выходных импульсов осуществляется путем сравнения пилообразного сигнала, создаваемого внутренним генератором на синхронизирующем конденсаторе (CT), с любым из двух управляющих сигналов. Выходной каскад включается в то время, когда пилообразное напряжение больше сигналов управления напряжением. По мере увеличения управляющего сигнала время, в течение которого пилообразный вход больше, уменьшается; следовательно, длительность выходного импульса уменьшается. D-триггер управления импульсом поочередно направляет модулированный импульс на каждый из двух выходных транзисторов. Для получения дополнительной информации о работе TL494 см. Примечания по применению, расположенные на ti.com.
Функциональная блок-схема
Источник опорного напряжения
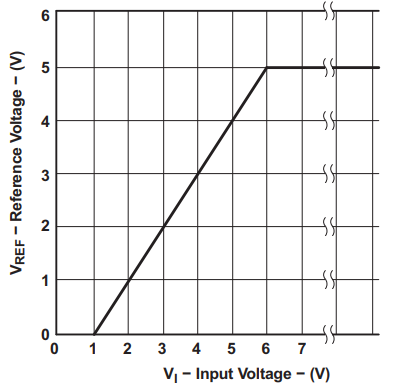
TL494 имеет внутренний источник опорного напряжения 5 В на выводе REF. Помимо получения опорного напряжения он дает питание логике управления, D-триггеру, генератору, компаратору мертвого времени, компаратору ШИМ. В стабилизаторе используется схема с плавно изменяющейся запрещенной зоной в качестве основного эталона для поддержания тепловой стабильности на уровне менее 100 мВ в рабочем диапазоне температур воздуха от 0 ° C до 70 ° C. Защита от короткого замыкания нужна, чтобы защитить источник опорного напряжения; для дополнительных цепей смещения доступен ток нагрузки 10 мА. Значение внутренне запрограммировано на начальную точность ± 5% и поддерживает стабильность изменения менее 25 мВ в диапазоне входного напряжения от 7 В до 40 В. Для входных напряжений менее 7 В стабилизатор насыщается в пределах 1 В на входе и отслеживает его.
Генератор
Генератор обеспечивает положительную пилообразную форму волны компараторам мертвого времени и ШИМ для сравнения с различными управляющими сигналами.
Частота сигнала выдаваемого генератором задается значениями сопротивления и емкости компонентов RT и СТ. Генератор заряжает конденсатор СТ постоянным током, величина которого задается сопротивлением резистора RT. Когда напряжение на конденсаторе СТ достигнет 3 В, схема генератора разряжает его, и цикл зарядки возобновляется. Зарядный ток определяется по формуле:
Icharge = 3 В/ RT (1)
Период пилообразного сигнала можно рассчитать по формуле :
Т = (3 В×СТ)/Icharge (2)
Частота сигнала от генератора:
fOSC = 1/(RT×CT) (3)
В двухтактном режиме частота на выходе будет равняться половине частоты генератора.
Однотактный режим:
f = 1/(RT×CT)
Двухтактный режим:
f = 1/(2RT×CT)
Управление временем задержки (мертвым временем)
Вход управления мертвым временем задает минимальное мертвое время (время отключения). Выход компаратора запрещает переключение транзисторов Q1 и Q2, когда напряжение на входе больше, чем линейное напряжение генератора. Внутреннее смещение 110 мВ обеспечивает минимальное мертвое время ~ 3%, когда вывод DTC подключен к земле. При подаче напряжения на вывод DTC длительность мертвого времени увеличивается. Это дает возможность линейно изменять длительность мертвого времени от минимума 3% до 100% при изменении входного напряжения от 0 В до 3,3 В соответственно. Благодаря полнодиапазонному управлению выходом можно управлять от внешних источников без нарушения работы усилителей ошибок. Вход управления мертвым временем DTC является входом с относительно высоким импедансом (II < 10 мкА) и должен использоваться там, где требуется дополнительное управление коэффициентом заполнения. Для правильного управления этот вывод должен быть подключен для управления либо подтянут к плюсу питания либо к земле. Обрыв цепи в таком случае даст неопределенное состояние.
Компаратор
Компаратор имеет смещение относительно источника опорного напряжения. Это обеспечивает изоляцию от входного источника питания для повышения стабильности. Вход компаратора не имеет гистерезиса, поэтому должна быть предусмотрена защита от ложного срабатывания вблизи порога переключения. Компаратор имеет время отклика 400 нс от любого из входов управляющего сигнала к выходным транзисторам с перегрузкой всего 100 мВ. Это обеспечивает положительный контроль выхода в пределах половины цикла для работы в рекомендованном диапазоне 300 кГц.
Широтно-импульсная модуляция ШИМ
Компаратор также управляет шириной выходного импульса. Для этого линейно нарастающее напряжения на синхронизирующем конденсаторе CT сравнивается с управляющим сигналом, присутствующим на выходе усилителей ошибки. Вход CT подключается через последовательный диод, который отсутствует на входе управляющего сигнала. Для этого требуется, чтобы управляющий сигнал (выход усилителя ошибки) был на ~ 0,7 В больше, чем напряжение на выводе CT, чтобы подавить выходную логику, и обеспечить работу с максимальным коэффициентом заполнения, не требуя понижения управляющего напряжения до истинного потенциала земли. Ширина выходного импульса изменяется от 97% периода до 0, так как напряжение на выходе усилителя ошибки изменяется от 0,5 В до 3,5 В соответственно.
Усилители ошибки
Оба усилителя ошибки с высоким коэффициентом усиления получают напряжение смещения от шины питания VI. Это позволяет использовать синфазное входное напряжение в диапазоне от –0,3 В до 2 В ниже VI. Оба усилителя ведут себя как несимметричные усилители с однополярным питанием, поскольку каждый выход активен только на высоком уровне. Это позволяет каждому усилителю работать независимо при уменьшении требуемой ширины выходного импульса. Когда оба выхода соединены по логике ИЛИ на инвертирующем входе компаратора ШИМ, доминирует усилитель, требующий минимального выходного импульса. Выходы усилителя подтянуты к низкому уровню генератором тока, чтобы обеспечить максимальную ширину импульса, когда оба усилителя отключены.
Управление выходом (OUTPUT CTRL)
Вывод OUTPUT CTRL определяет, работают ли выходные транзисторы параллельно или в в двухтактном режиме. Этот вход является источником питания для D-триггера. Вывод OUTPUT CTRL является асинхронным и управляет напрямую выходом, независимо от генератора или D-триггера. Входные условия должны быть четко зафиксированы, определяемым применением. Для параллельной работы выходных транзисторов OUTPUT CTRL должен быть заземлен. При этом отключается D-триггер и его выходы. В этом режиме импульсы, наблюдаемые на выходе компаратора мертвого времени / ШИМ, передаются обоими выходными транзисторами параллельно. Для двухтактного режима вывод OUTPUT CTRL должен быть соединен с источником опорного напряжения 5 В. В этом состоянии каждый из выходных транзисторов поочередно активируется D-триггером.
Выходные транзисторы
В TL494 имеются два выходных транзистора. Оба транзистора сконфигурированы как открытый коллектор / открытый эмиттер, и каждый может потреблять или потреблять до 200 мА. Транзисторы имеют напряжение насыщения менее 1,3 В в конфигурации с общим эмиттером и менее 2,5 В в конфигурации эмиттерного повторителя. Выходы защищены от перегрузки, чтобы предотвратить выход из строя, но не имеют достаточного ограничения тока, чтобы позволить им работать как выходы источника тока.
Функциональные режимы устройства
Когда вывод OUTPUT CTRL подключен к земле, TL494 работает в однотактном или параллельном режиме. Когда вывод OUTPUT CTRL подтянут к VREF, TL494 работает в обычном двухтактном режиме.
Применение
В следующем примере TL494 используется для создания источника питания 5 В / 10 А. Эта схема была взята из примечания к приложению SLVA001.
- VI = 32 В
- VO = 5 В
- IO = 10 A
- fOSC = 20 кГц частота генератора
- VR = 20 мВ размах напряжения (VRIPPLE)
- ΔIL = 1.5 A изменение тока индуктивности
Этапы проектирования подробно
Источник питания
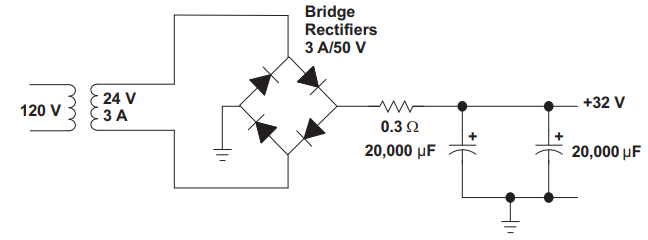
В источнике постоянного тока 32 В для этого блока питания используется трансформатор с входным напряжением на 120 В и выходным на 24 В номинальной мощностью 75 ВА. Вторичная обмотка 24 В питает двухполупериодный мостовой выпрямитель, за которым следует токоограничивающий резистор (0,3 Ом) и два фильтрующих конденсатора (см. Рисунок 10).
Выходной ток определяется по формулам 6 и 7:
VRECTIFIER = VSECONDARY × √2 = 24 В × √2 = 34 В (6)
IRECTIFIER(AVG) ≈ (VO × IO)/ VI ≈ (5 В × 10 А)/ 32 В = 1.6 А (7)
Двухполупериодный мостовой выпрямитель 3 A / 50 В удовлетворяет этим расчетным условиям. На Рисунке 9 показаны секции переключения и управления.
Цепи управления
Генератор
Подключение внешнего конденсатора и резистора к выводам 5 и 6 задает частоту генератора TL494. Генератор настроен на работу на частоте 20 кГц с использованием значений компонентов, рассчитанных по формулам 8 и 9:
fOSC = 1/(RT×CT) (8)
Выберем CT = 0,001 мкФ и рассчитаем RT:
RT = 1/(fOSC×CT) = 1/((20 × 103)×(0,001 × 10-6)) = 50 кОм (9)
Усилитель ошибки
Усилитель ошибки сравнивает сигнала с эталоном от источника опорного напряжения 5В и регулирует ШИМ для поддержания постоянного выходного тока (см. Рисунок 11).
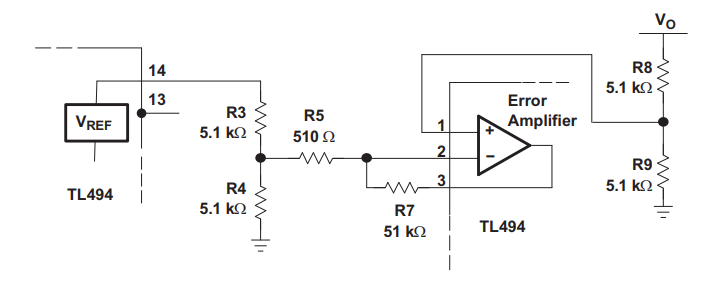
Напряжение в 2,5 В формируется делителем на резисторах R3 и R4 от источника опорного напряжения VREF = 5 В. Сигнал ошибки выходного напряжения в 2,5 В также формируется делителем на резисторах R8 и R9. Если выходной сигнал должен быть установлен точно на уровне 5,0 В, для регулировки можно использовать потенциометр 10 кОм вместо резистора R8.
Чтобы повысить стабильность схемы усилителя ошибки, выходной сигнал усилителя ошибки подается обратно на инвертирующий вход через через резистор R7, уменьшая коэффициент усиления до 101.
Токоограничивающий усилитель
Источник питания был рассчитан на ток нагрузки 10 А и реактивный ток IL 1,5 А, поэтому ток короткого замыкания должен быть:
ISC = IO + IL/2 = 10,75 А (10)
Схема ограничения тока показана на Рисунке 12.
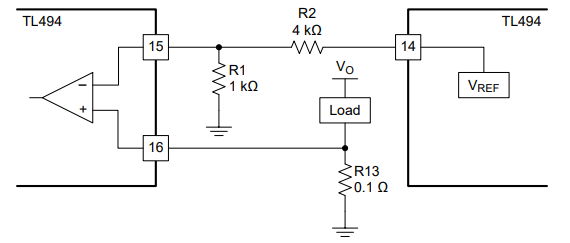
Резисторы R1 и R2 задают опорное напряжение приблизительно 1 В на инвертирующем входе усилителя ограничения тока. Резистор R13, включенный последовательно с нагрузкой, подает 1 В на неинвертирующий вход токоограничивающего усилителя, когда ток нагрузки достигает 10 А. Ширина выходного импульса соответственно уменьшается. Значение R13 рассчитывается по формуле 11.
R13 = 1В / 10А = 0,1 Ом (11)
Плавный пуск и мертвое время
Чтобы снизить нагрузку на переключающие транзисторы во время запуска, необходимо уменьшить пусковой выброс, возникающий при заряде конденсатора выходного фильтра. Наличие управления мертвым временем делает реализацию схемы плавного пуска относительно простой (см. Рисунок 13).
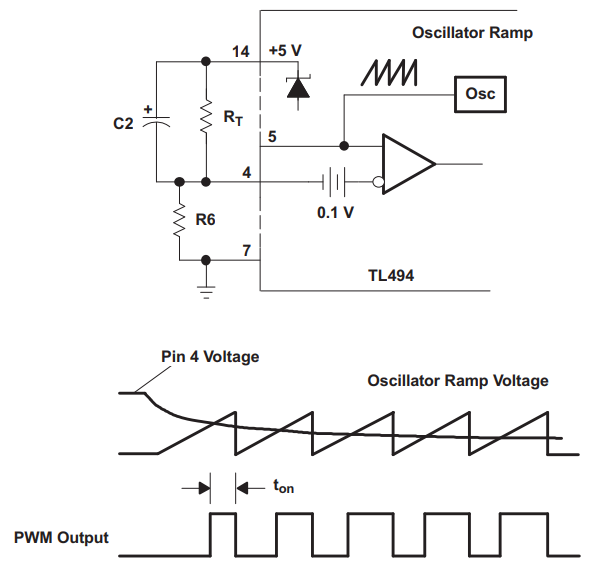
Схема плавного пуска позволяет медленно увеличивать ширину импульса на выходе (см. Рисунок 13), подавая сигнал с отрицательной крутизной на вход DTC (вывод 4).
В момент включения конденсатор C2 имеет минимальное сопротивление поэтому подтягивает вход DTC к источнику опорного напряжения 5 В, который отключает выходы (100% мертвое время). По мере того как конденсатор заряжается через R6, ширина выходного импульса медленно увеличивается, пока контур управления не примет команду. При соотношении резисторов 1:10 для R6 и R7 напряжение на выводе 4 после запуска составляет 0,1 × 5 В,
или 0,5 В.
Время плавного пуска обычно находится в диапазоне от 25 до 100 тактов. Если выбрано 50 тактов при частоте переключения 20 кГц, время плавного пуска будет:
t = 1/f = 1 / 20 кГц = 50 мкс на такт (12)
С2 = (время плавного пуска) / R6 = (50 мкс × 50 тактов) / 1 кОм = 2,5 мкФ (13)
Это помогает устранить любые ложные сигналы, которые могут создаваться схемой управления при подаче питания.
Расчет индуктивности
Используемая схема подключения показана на рисунке 14.

Необходимое значение индуктивности L рассчитывается по формулам:
d = коэффициент заполнения = VO/VI = 5 В/32 В = 0.156
f = 20 кГц (цель проектирования)
ton = время включения (S1 замкнут) = (1/f) × d = 7.8 мкс
toff = время выключения (S1 разомкнут) = (1/f) – ton = 42.2 мкс
L ≈ (VI – VO ) × ton/ΔIL ≈ [(32 В – 5 В) × 7.8 мкс ]/1.5 A ≈ 140.4 мкГн
Расчет выходной емкости
После расчета индуктивности фильтра рассчитывается емкость конденсатора выходного фильтра для удовлетворения требований к пульсациям на выходе. Электролитический конденсатор можно смоделировать как последовательно соединенные индуктивность, сопротивление и емкость. Чтобы обеспечить хорошую фильтрацию, частота пульсаций должна быть намного ниже частот, при которых последовательно подключенная индуктивность становится значимой. Итак, два интересующих компонента — это емкость и эквивалентное последовательное сопротивление (ESR). Максимальное значение ESR рассчитывается в соответствии с соотношением между заданным размахом пульсаций напряжения и размахом пульсаций тока.
ESR(max) = ΔVO(ripple) / ΔIL = 0.1 В / 1.5 A ≈ 0.067 Ом (14)
Минимальная емкость C3, необходимая для поддержания пульсаций напряжения VO на уровне менее 100 мВ, рассчитывается в соответствии с уравнением 15:
C3 = ΔIL / 8fΔVO = 1.5 А / (8 × 20 × 103 × 0.1 В) = 94 мкФ (15)
Выбран конденсатор на 220 мФ, 60 В, потому что он имеет максимальное значение ESR 0,074 Ом и максимальный ток пульсаций 2,8 А.
Расчет мощности для транзисторного ключа
Мощный транзисторный ключ был построен с применением в качестве управляющего транзистора NTE153 pnp и выходного транзистора npn NTE331. Они образуют собой составной транзистор Дарлингтона (см. Рисунок 15).
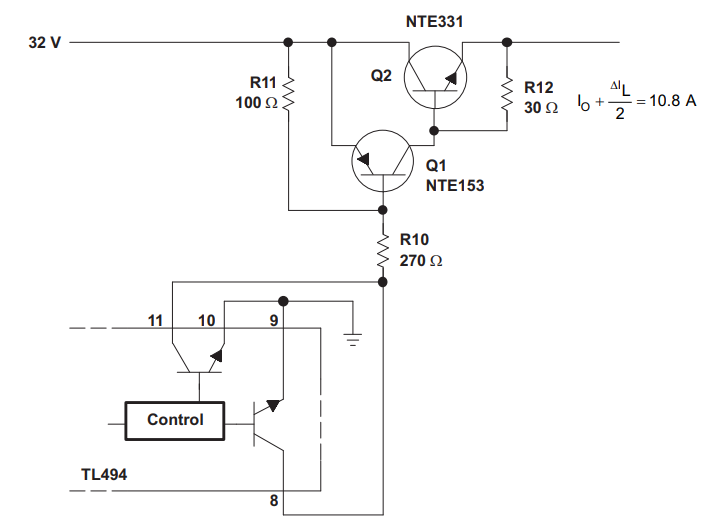
hFE (Q1) при I от 3 A = 15 (16)
hFE (Q2) при I от 10 A = 5 (16)
 |
(18) |
Значение R10 рассчитывается по формуле:
 |
(19) |
R10 ≤ 207 Ом
На основании этих расчетов для R10 было выбрано ближайшее стандартное сопротивление резистора 220 Ом. Резисторы R11 и R12 позволяют разрядить носители зарядов в ключах транзисторах, когда они выключены.
Описанный источник питания демонстрирует гибкость схемы управления ШИМ на TL494. Эта конструкция блока питания демонстрирует многие методы управления блоком питания, обеспечиваемые TL494, а также универсальность схемы управления.
График выходных характеристик
Рекомендации по источнику питания
TL494 спроектирован для работы от питающего напряжения в диапазоне от 7 В до 40 В. Это напряжение должно хорошо стабилизироваться. Если источник питания расположен на расстоянии более нескольких дюймов от устройства, может потребоваться дополнительный конденсатор большой емкости в дополнение к керамическим байпасным конденсаторам. Танталовый конденсатор емкостью 47 мкФ будет в этом случае типовым решением, однако он может варьироваться в зависимости от выдаваемой выходной мощности.
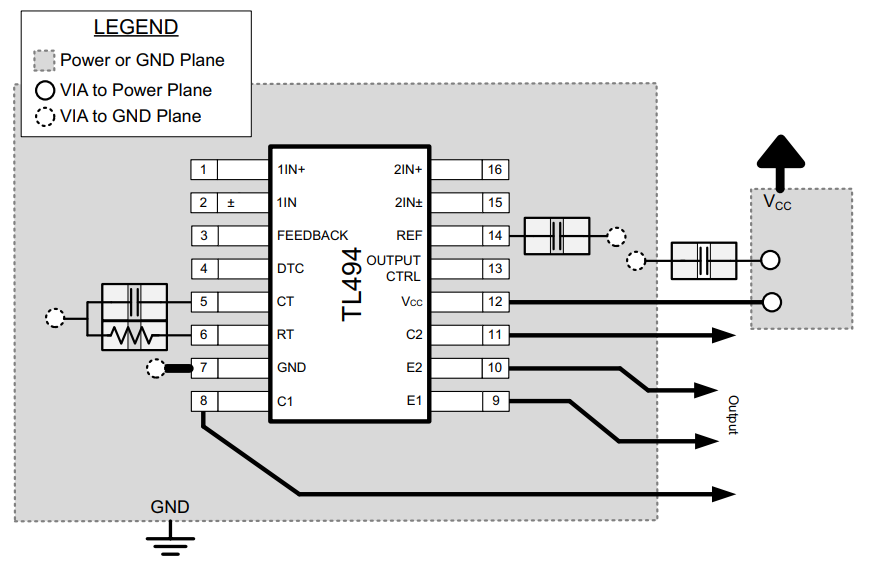
Печатная плата
Рекомендации по проектированию печатной платы
Всегда старайтесь использовать индуктивность с низким уровнем электромагнитных помех с ферритовым сердечником закрытого типа. Такими примерами могут быть индуктивности с тороидальным сердечником и сердечником типа E. Открытые сердечники могут использоваться, если они имеют низкие характеристики электромагнитных помех и расположены немного дальше от трасс и компонентов с низким энергопотреблением. Также старайтесь расположить полюса перпендикулярно печатной плате, если используете открытый сердечник. Цилиндрические сердечники обычно издают самый нежелательный шум.
Обратная связь
Постарайтесь проложить трассу обратной связи как можно дальше от катушки индуктивности и зашумленных цепей питания. Старайтесь, чтобы трасса обратной связи была как можно более прямой и широкой. Эти два требования иногда требуют компромисса, но требование держаться подальше от электромагнитных помех катушки индуктивности и других источников шума является более важным из них. Прокладывайте трассу обратной связи на стороне печатной платы, противоположной катушке индуктивности, с земляным полигоном разделяющим их.
Входные / выходные конденсаторы
При использовании небольшого керамического конденсатора для входного фильтра его следует располагать как можно ближе к выводу VCC микросхемы. Это устранит как можно больше эффектов индуктивности дорожек и обеспечит более чистое напряжение питания внутренней шины микросхемы. Некоторые проекты требуют использования проходного конденсатора, подключенного от выхода к выводу «feedback», как правило, из-за требований к стабильности. В этом случае его также следует расположить как можно ближе к микросхеме. Использование конденсаторов для поверхностного монтажа также уменьшает длину проводов и снижает вероятность попадания шума в действующую антенну, создаваемую выводными компонентами.
Компоненты сглаживающего фильтра
Компоненты сглаживающего фильтра для стабильности также следует размещать рядом с микросхемой. Компоненты для поверхностного монтажа здесь также предпочтительнее по тем же причинам, что и конденсаторы фильтра. Они также не должны располагаться очень близко к катушке индуктивности.
Трассы и земляные полигоны
Сделайте все силовые (сильноточные) трассы как можно более короткими, прямыми и толстыми. На стандартной печатной плате хорошей практикой является создание дорожек с абсолютным минимумом 15 мил (0,381 мм) на ампер. Катушка индуктивности, выходные конденсаторы и выходной диод должны располагаться как можно ближе друг к другу. Это помогает уменьшить электромагнитные помехи, излучаемые цепями питания из-за высоких коммутируемых токов через них. Это также снизит индуктивность и сопротивление выводов, что, в свою очередь, уменьшит всплески шума, звон и резистивные потери, которые вызывают ошибки напряжения. Заземление микросхемы, входные конденсаторы, выходные конденсаторы и выходной диод (если он есть) должны быть подключены как можно ближе друг к другу и непосредственно к шине земли. Также было бы неплохо иметь слой земли с обеих сторон печатной платы. Это также снизит шум за счет уменьшения ошибок контура заземления, а также за счет поглощения большего количества электромагнитных помех, излучаемых катушкой индуктивности. Для многослойных плат с более чем двумя слоями земляной слой может использоваться для разделения слоя питания (где находятся трассы питания и компоненты) и сигнального слоя (где располагаются обратная связь, фильтр и компоненты) для повышения производительности. На многослойных платах потребуется использование переходных отверстий для соединения дорожек и различных слоев. Хорошей практикой является использование одного стандартного перехода на 200 мА тока, если трассе потребуется провести значительный ток от одного слоя к другому. Расположите компоненты так, чтобы петли тока переключения изгибались в одном направлении. В зависимости от способа работы импульсных регуляторов существует два состояния питания. Одно состояние, когда переключатель включен, и одно состояние, когда переключатель выключен. Во время каждого состояния будет токовая петля, созданная силовыми компонентами, которые в это время проводят ток. Расположите силовые компоненты так, чтобы во время каждого из двух состояний токовая петля имелась в одном направлении. Это предотвращает инверсию магнитного поля, полученную от трасс между двумя полупериодами и
снижает излучаемые электромагнитные помехи.
Пример трассировки печатной платы
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Нашел в интернете схему дифференциального усилителя, добавил резистор R8, и схема заработала идеально. Коэффициент усиления также 5, только теперь другая крайность, усилитель чисто дифференциальный, и при равенстве входных напряжений на выходе 0. А при разности сигналов, допустим, в 0,05В, на выходе ОУ 250мВ. Только не пойму, почему первая схема дает 1В на выходе при равенстве входных напряжений и величине входных напряжений 1В, а вторая не дает 1В на выходе, хотя отличие всего-лишь в одном резисторе и то как делителя.
В первой схеме, при изменении V8 Ку=1+R6/R5, что составит +5, а при изменении V9 Ку=-R6/R5, что составит -4. Вот поэтому Вы и «теряете» 50 мВ.
Простой дифф усилитель с дополнительным резистором R8 имеет при изменении V8 Ку=1/(1+R7/R8)*(1+R6/R5), что составит +5, а при изменении V9 Ку=-R6/R5, что составит -5. Поэтому при равенстве V8=V9 выход и будет 0, а разница входов в 50 мВ даст разницу на выходе 250 мВ, как и должно получиться.
У простого дифф усилителя по Вашей схеме Rвх- будет 10 кОм, а Rвх+ целых 60 кОм. Если у Вас источники сигналов с низким выходным сопротивлением, вроде идеальных батарей V8, V9, то результат будет точным. Если какие-то реальные источники с выходным сопротивлением, например, 1 кОм, точность упадет.
Вам какой результат-то нужен? Чтобы при V8=1 и V9=1 на выходе было 1? Или 0?
P.S. И еще, использование первой схемы в цепи ООС любого другого устройства даст Вам разные характеристики управления, как частотные, так и по глубине, для уставки и для петли ООС. Про это не нужно забывать.
Добавка:
Сейчас есть хорошие разностные (difference) усилители, вроде AD628 и инструментальные вроде AD8227. Уставку заводят на REF. Если посмотрите, как они устроены, то многое станет понятнее.
Диагностика ШИМ-преобразователей
Основные проблемы с ШИМ-преобразователей это
1.-Пробой ключевых транзисторов
2.-Проблемы с самим ШИМ-контроллером, драйверами или обвязкой
Пробой ключевых транзисторов
Выявляется легко — плата при попытке старта уходит в защиту; при проверке мультиметром в режиме измерения сопротивлений мосфетов — одно из плеч стабилизатора оказывается в КЗ. КЗ обычно считается сопротивление менее 1 Ома (в большинстве случаев, но не всегда; для справки: на современных и относительно современных топовых ГПУ — к примеру, Radeon 2900 — нормальное сопротивление ядра рабочей видеокарты может быть в районе 0.5Ом; кроме того — сопротивление по линиям питания ГПУ/процессоров/мостов сильно зависит от температуры, и при повышении температуры кристалла градусов на 10-20 меняется в разы, в сторону уменьшения).
Если в КЗ оказалось нижнее плечо — возможно, поврежден не ШИМ, а нагрузка (для ШИМ процессора, к примеру, нагрузкой помимо процессора может являться северный мост).
Неисправный транзистор в однофазном стабилизаторе выявляется легко (тот, который в КЗ — пробит); в многофазном (ШИМ-питатель процессора) — транзисторы по постоянному току оказываются включены параллельно, и выявить поврежденный транзистор на практике можно двумя способами:
1) Рассоединить фазы ШИМ. Проще всего — отпаять дроссели; однако, если пробито и верхнее, и нижнее плечо — единственный вариант это демонтировать транзисторы. Далее — находится пробитый транзистор.
2) Как правило, при пробое полевого транзистора также повреждается диэлектрический слой между затвором и каналом — в итоге пробитый транзистор будет иметь сопротивление затвор-исток от единиц до десятков Ом. Этим можно воспользоваться для «экспресс-диагностики» — достаточно измерить сопротивление затвор-исток пробитого плеча в каждой фазе преобразователя; где сопротивление будет намного ниже — там и проблема. Если подозрительый транзистор не обнаружен — использовать способ 1.
Итак, с поврежденным транзистором определились — теперь его можно смело демонтировать, и ставить на его место такой же либо близкий по параметрам аналог. Однако — предвариельно стоит опять-таки измерить сопротивление между площадками исток-сток пробитого плеча (чтобы убедиться, что КЗ исчезло), а также сравнить сопротивление затвор-исток в исправной фазе и в неисправной после выпайки транзистора т.к. есть ненулевая вероятность повреждения микросхемы драйвера, и возможный (но не обязательный!) симптом — опять-таки явно заниженное сопротивление.
Если сопротивление в норме — впаиваем новый транзистор, впаиваем все выпаянные в процессе диагностики компоненты (если таковые имеются), и пытаемся включить плату.
Настоятельно рекомендуется первый запуск в случае ремонта ШИМ-питатея процессора производить без установленного процессора, выставив VID вручную, или с тестовым процессором. Не поленитесь в случае выставления VID перемычками отследить подключение Vccref/Vssref выводов ШИМ-контроллера для плат s478/s754 и новее — как правило, они заводятся на соответствующие выводы сокета напрямую, и соединяются с Vcc/Vss через резисторы небольшого номинала для адекватной работы ШИМ в случае повреждения контакта сокета одной из линий; однако на некоторых платах резисторы подтяжки к Vcc/Vss отсутствуют — и ШИМ без перемычек Vccref-Vcc и Vssref-Vss в сокете нормально работать не будет.
При наличии возможности запитать отремонтированный преобразователь от отдельного источника (пример — платы с дополнительной косичкой +12В, в которых линии +12 косички не соединены с линиями +12 основного разъема; платы с наличием фильтрующего дросселя перед ШИМ-преобразователем, который можно соответственно временно выпаять) — подавать питание через лампочку 12В 21Вт (выступающую в качестве ограничителя тока). При этом, естественно, преобразователь должен быть ненагруженным, либо — нагруженным небольшой нагрузкой (до нескольких Вт). Если лампочка не светится, и напряжение на выходе в норме (соответствует выставленному) — выключаем БП, возвращаем на место дроссель (если выпаивали) или подключаем косичку доп. питания напрямую, устанавливаем процессор с системой охлаждения, и пытаемся запустить плату.
Если запуск прошел удачно, и плата ожила — можно начинать тестирование под нагрузкой (запустив тот же OCCT), проверяя температуру мосфетов. Если в течение некоторого времени (обычно 5-10 минут хватает для установки температурного режима) перегрева нет (или если температура свеже-впаянного мосфета не сильно отличается от температуры мосфетов в соседних фазах для многофазного преобразователя) — ремонт можно считать успешно законченым, а плату — ставить в тестовый стенд на обкатку.
Проблемы с ШИМ-контроллером, драйверами и обвязкой
Проявляются по-разному. От ухода БП в защиту (при этом пробитых мосфетов при проверке не выявлено) до отсутствия или несоответствия номинальному выходного напряжения.
Универсальных решений при этом нет, потому как одни и те же симптомы могут быть вызваны разными причинами, потому ремонт следует начинать с внимательного изучения даташита на ШИМ-контроллер.
Ниже будут рассмотрены несколько типовых случаев, и шаги по диагностике:
1. ШИМ стартует, но после прекращает работу.
Вероятные причины: обрыв петли ОС; перегрузка по току потребления; проблемы с выходными конденсаторами фильтра; проблема с драйвером или ШИМ.
Шаги по диагностике: визуальный осмотр на предмет сколотых элементов; посмотреть осциллографом напряжение на входе Vfb, на выходе ключей, на затворах ключей и на выходных конденсаторах; измерить сопротивление нагрузки стабилизатора и сравнить с типовым для подобных плат.
Примечание: для сдвоенных ШИМ или комбинированных контроллеров ШИМ + линейный стабилизатор — как правило, при аварийном отключении одного из стабилизаторов глохнет и второй.
2. ШИМ не стартует.
Вероятные причины: запуск ШИМ запрещен соответствующим уровнем на входе разрешения запуска (смотреть ДШ конкретного ШИМ); отсутствует одно из питающих напряжений; неисправный ШИМ.
Шаги по диагностике: визуальный осмотр на предмет сколотых элементов; измерение напряжений на выводах ШИМ и сравнение их с указанными в даташите; замена ШИМ на заведомо исправный.
3. Напряжение на выходе не соответствует номинальному (для данной комбинации VID в случае питатешя процессора или для данной нагрузки).
Вероятные причины: проблемы в петле ООС (обрыв/уход номинала одного из резисторов); неисправный ШИМ-контроллер.
Шаги по диагностике: визуальный осмотр на предмет сколотых элементов; для ШИМ процессора — повторно проверить все управляющие сигналы на входах; измерить напряжение на Vfb и сравнить с заявленным в даташите Vref (для ШИМ процессора — с выставленным VID’ами); если не совпадают — заменить ШИМ на заведомо исправный.
4. При старте ШИМ БП уходит в защиту; КЗ на ключах отсутствует.
Вероятные причины: неисправность ШИМ или драйвера ключей.
Шаги по диагностике: для многофазных преобразователей — сравнение сопротивлений затвор-исток фаз (заниженное сопротивление может свидетельствовать о неисправности драйвера); проверка обвязки драйвера/ШИМ (измерение номиналов резисторов, проверка диодов при их наличии, сравнение показаний тестера в режиме измерения сопротивлений на керамических конденсаторах для многофазных ШИМ); замена драйверов и ШИМ на заведомо исправные.
5. При работе ШИМ — свист; плата не работает или работает нестабильно.
Вероятные причины: обрыв петли ООС или RC-цепочки для предотвращения возбуждения в петле ООС; деградация конденсаторов фильтра.
Шаги по диагностике: визуальный осмотр на предмет сколотых элементов; проверить осциллографом или тестером напряжение на Vfb; проверить осциллографом уровень пульсаций на выходе; заменить конденсаторы фильтра.
Вт май 31, 2016 01:17:29
Сегодня решил почитать еще раз даташит по TL494. Вот текст из даташита на русском.
«Выходы двух усилителей объединены диодным ИЛИ. Тот
усилитель, на выходе которого большее напряжение,
перехватывает управление логикой. При этом выходной сигнал
доступен не порознь, а только с выхода диодного ИЛИ (он же вход
компаратора ошибки). Таким образом, только один усилитель
может быть замкнут петлей ОС в линейном режиме. Этот
усилитель и замыкает главную, линейную ОС по выходному
напряжению. Второй усилитель при этом может использоваться как
компаратор — например, превышения выходного тока, или как ключ
на логический сигнал аварии (перегрев, КЗ и т.п.), дистанционного
выключения и пр. Один из входов компаратора привязывается к
ИОНу, на втором организуется логическое ИЛИ аварийных
сигналов (еще лучше — логическое И сигналов нормальных
состояний).»
Судя из текста, только один усилитель можно использовать для точной подстройки напряжения или тока, создавая ему из третьей ноги ООС. Во втором усилителе ООС не делают. Тем самым он становится компаратором и служит для резкого отключения например тока. т.е. держать ток не получиться на определенном уровне. Я прав? Или можно два использовать-это значит на втором также организуется ООС и все будет работать?
Вт май 31, 2016 01:50:04
nogik5 писал(а):это значит на втором также организуется ООС и все будет работать?
Там перевод какой-то проблемный. Даже в оригинальном даташите показана возможность подключения ОС на оба усилителя:
Да и по структуре видно, что они совершенно идентичны:
Какой перехватит управление, тот и будет пользоваться своей ОС.
У людей — работает. ![]()
http://forum.cxem.net/index.php?showtop … try2069673
http://www.skoots.yolasite.com/19-power … harger.php
- Вложения
-
- 1234.JPG
- (9.66 KiB) Скачиваний: 3102
-
- 123.jpg
- (21.88 KiB) Скачиваний: 3970
Вт май 31, 2016 08:01:39
Усилители равноценны но работать будет только один. Как и блок питания может работать только в одном из режимов, стабилизация напряжения или стабилизация тока. Одновременно 2 режима невозможны.
ОС на усилителе будет работать та чей усилитель в данный момент активный.
Вт май 31, 2016 08:04:58
Телекот писал(а):Одновременно 2 режима невозможны.
Как я понял, автор это понимает. ![]() Тем более, выход то у обоих усилителей ошибки один.
Тем более, выход то у обоих усилителей ошибки один. ![]()
Вт май 31, 2016 08:11:53
Тогда пускай читает только третье предложение. ![]()
Вт май 31, 2016 09:22:26
Спасибо. Теперь понятно. А почему в некоторых схемах в интернете с третьей ноги микросхемы не заведена ООС на усилители ошибки, ведь тогда они становятся компараторами?
Вт май 31, 2016 10:43:02
Нет ОС получается через весь блок питания. Другое дало что она при этом жутко опаздывает и ОС начинает возбуждаться, появляются писки и жужжания в дросселе. В нормальных схемах обычно вводят частотно зависимую коррекцию местной ОС с выхода усилителя ошибки.
Вт май 31, 2016 11:33:47
да, без местной ООС УО превращается в компаратор.
УО, охваченный местной ООС (RC цепь), превращается в регулятор.
когда применяется триггерная защита от перегрузки или кз, регулирование нам не не нужно, и корректирующая цепь на УО не ставится, так как срабатывание защиты однократное и после срабатывания защиты БП просто отключается.
когда нам нужно ограничивать (стабилизировать) ток, то второй УО (по току) обязательно корректируется собственной цепью, чтобы получился регулятор тока.
например, ограничивать (стабилизировать) ток нужно в «лабораторных» БП или зарядных устройствах.
Вт май 31, 2016 11:41:37
У компаратора 2 выходных уровня 0 и 1, промежуточных состояний нет. Это не совсем подходит к данному случаю. Просто медленная общая ОС начинает возбуждаться на частоте где ОС превращается в положительную. На выходе усилителей обычно тогда несколько синусоид разной амплитудой.
Вт май 31, 2016 15:28:32
Спасибо, теперь я все понял. Если я хочу сделать регулятор, то ставлю RC цепь на 3 ногу со 2 или 15 ногой, она не позволит усиливать высокочастотную составляющую из-за которой шим и скачет, также не забываю поставить резистор большего номинала параллельно с RC цепью, для постоянного тока, который заведет ООС по постоянному току, чтобы и по постоянному току усилители ошибки не превращались в компараторы.
Так,я выбрал резисторы для операционных усилителей для цепи ООС 1МОм для токового усилителя ошибки и 1МОм для регулятора напряжения. Резисторы на инвертирующем входе — для токового усилителя 20кОм(Ку=1Мом/20кОм=50). Для усилителя по напряжению 5кОм(Ку=1МОм/5кОм=200). Также шунтирую керамическими конденсаторами 0,2mkF 2-3 и 15-3 ногу микросхемы для не усиления пульсаций с частотой 50кГц, для их полного удаления с выходов операционников, по моим расчетам именно такие емкости. Для токового усилителя ошибки я думаю, что Ку=50 будет достаточной т.к. при увеличении тока на 0.1А даст нам увеличение напряжения на шунте 0.1Ом на 0,01В, значит-0.01*50=0,5В-для нашего PWM компаратора.
Чт апр 22, 2021 03:55:23
Здравствуйте. Очень хотелось бы подробней узнать про настройку оос на тл494. Я примерно понимаю что нужно настраивать ачх и фчх. Но не могу разложить все по полочкам. Большая просьба разясните на что влияет уменьшение или увеличение конденсатора и резистора в цепи между 2 и 3 ногой. Может это как-то можно рассчитать или методом перебора это все делается. Кому не сложно поделитесь знаниями. Заранее спасибо
Чт апр 22, 2021 04:43:04
Методом подбора.
Расчёт очень сложный, поскольку на это влияет очень много параметров, включая монтаж, и взаимное расположения элементов.
Чт апр 22, 2021 06:11:38
Хорошо метод подбора я понял. Ну а в процессе подбора на что обращать внимание? У Вас здесь у многих большой опыт в данной теме. Как мне узнать запаздывает ли стабилизация и пропускает ли частотные помехи.
Чт апр 22, 2021 06:42:49
У всех разная методика.
Я подбираю конденсатор (без резистора) что бы схема работала устойчиво во всём диапазоне напряжений и токов стремясь получить наименьшую ёмкость. Потом увеличиваю его в 2 раза и подбираю резистор стремясь получить максимальное сопротивление и сохранить устойчивость.
При использовании в лабораторном БП где широкий диапазон напряжений и токов и при неудачном расположении бывает необходима более сложная цепь коррекции.
С двумя RС цепочками и плюс маленький конденсатор без резистора.
Чт апр 22, 2021 06:50:54
Монтаж и взаимное расположение не должны быть выполнены с нарушениями известных правил. На этом их ощутимое влияние закончится раз и навсегда.
Что касается коррекции, то нужно научиться работать в симуляторе, только тогда получается осмысленное достижение нужного результата.
Если понадобятся модели, на Казусе в теме по LTspice есть библиотека Бордодынова А. П., за разъяснениями можно к нему обратиться.
Чт апр 22, 2021 06:55:16
12943 писал(а):На этом их ощутимое влияние закончится раз и навсегда.
Не заканчивается.
12943 писал(а):то нужно научиться работать в симуляторе
В этом вопросе симулятор и железо совсем разная вещь.
В симулятор не загонишь полностью схему (а если и загонишь то без пользы потратишь много времени) и не учтёшь всех паразитных индуктивностей и ёмкостей.
Чт апр 22, 2021 07:04:04
У всех разная методика.
Я подбираю конденсатор (без резистора) что бы схема работала устойчиво во всём диапазоне напряжений и токов стремясь получить наименьшую ёмкость.
Можно поподробнее расписать вашу методику? Как проверяется устойчивость, какие действия выполняются, по шагам?
Спасибо.
Чт апр 22, 2021 07:08:47
Постепенно увеличиваю ёмкость. пока схема не станет работать устойчива, потом ставлю конденсатор в 2 раза больше и увеличиваю резистор пока схема сохраняет устойчивость. Что здесь не понятного.
Чт апр 22, 2021 07:38:24
![]() Спасибо за советы. Будем пробовать.
Спасибо за советы. Будем пробовать.
Чт апр 22, 2021 08:43:06
Всё не понятно
стремясь получить наименьшую ёмкость….Постепенно увеличиваю ёмкость…потом ставлю конденсатор в 2 раза больше
Powered by phpBB © phpBB Group.
phpBB Mobile / SEO by Artodia.
Время на прочтение
10 мин
Количество просмотров 381K
Всем привет!
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.

Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
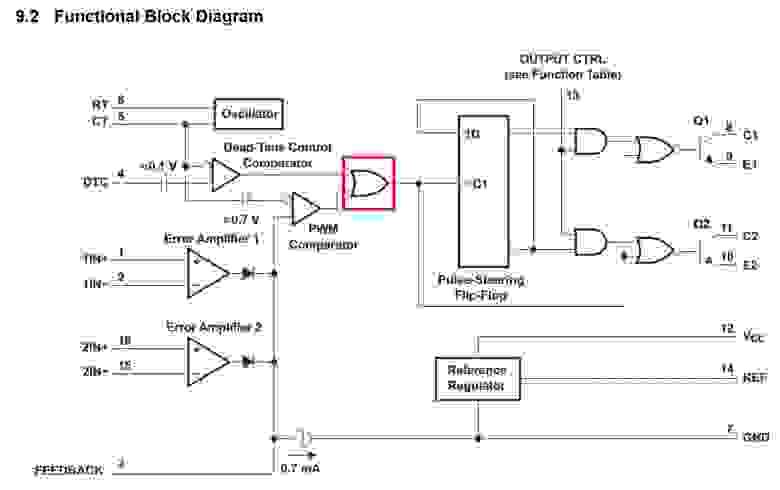
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
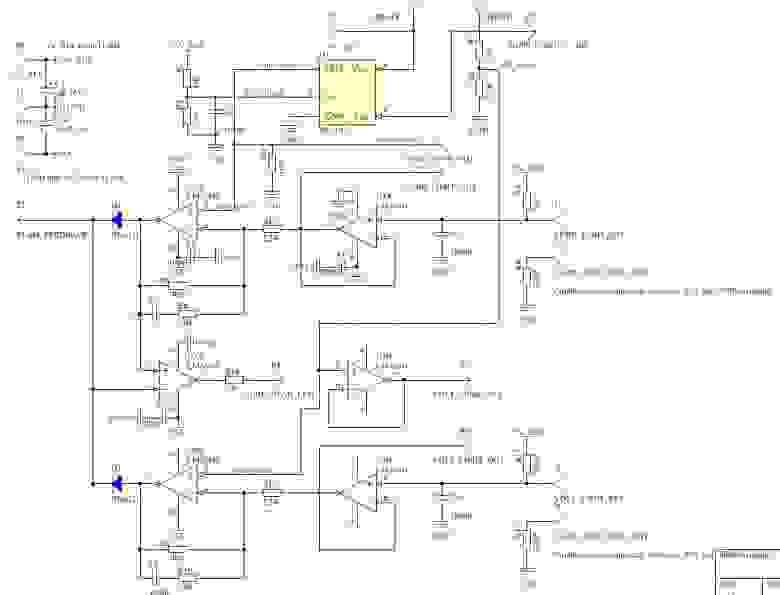
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
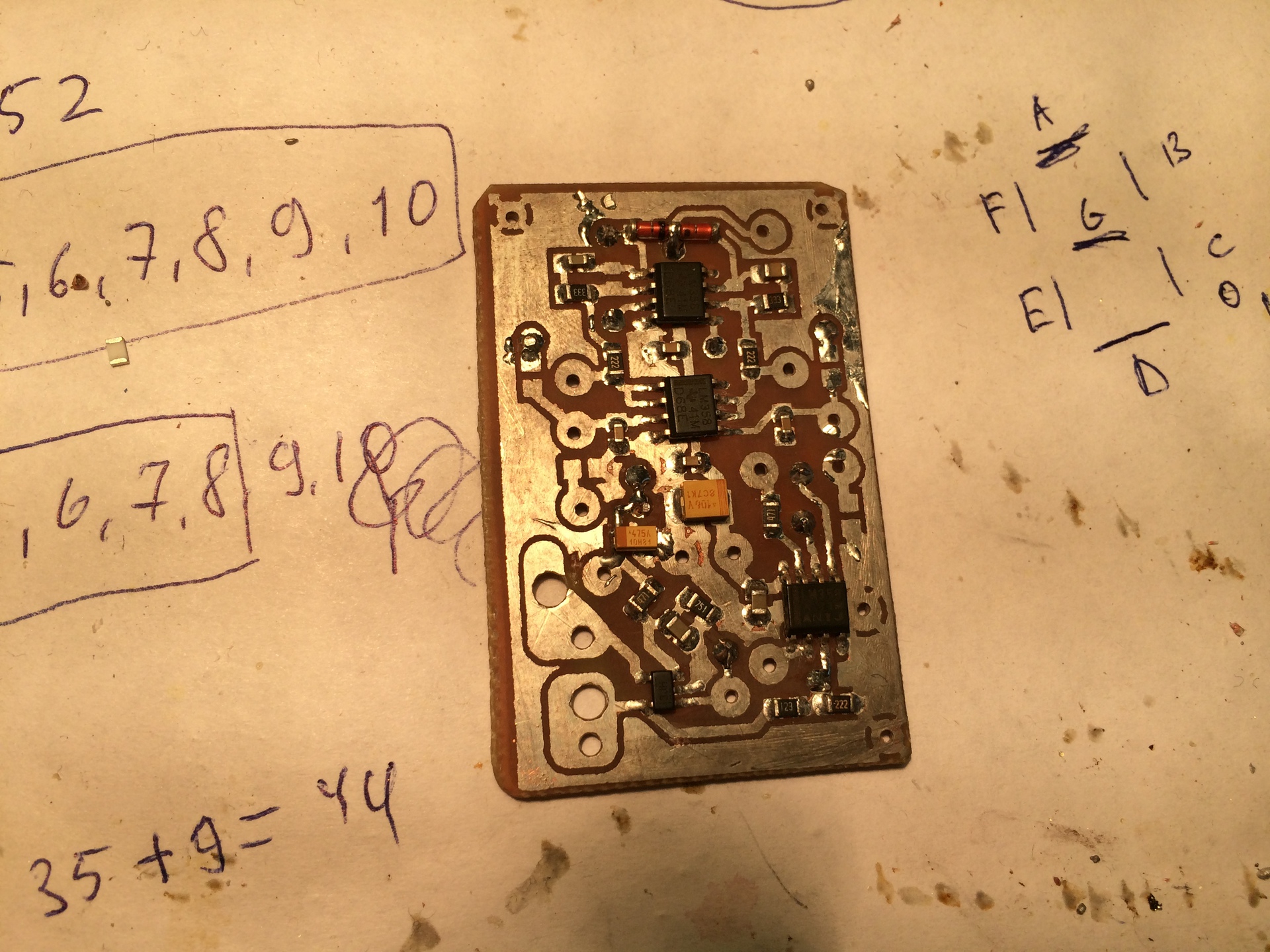
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру