
TL494 (Texas Instruments) — это наверное самый распространённый ШИМ-контроллер, на базе которого создавалась основная масса компьютерных блоков питания, и силовые части различных бытовых приборов.
Да и сейчас эта микросхема довольно популярна среди радиолюбителей, занимающихся построением импульсных блоков питания. Отечественный аналог этой микросхемы — М1114ЕУ4 (КР1114ЕУ4). Кроме того ещё разные зарубежные фирмы выпускают данную микросхему с разными названиями. Например IR3M02 (Sharp), KA7500 (Samsung), MB3759 (Fujitsu). Всё это одна и та же микросхема.
Возраст её гораздо моложе TL431. Выпускаться он начала фирмой Texas Instruments где то с конца 90-х — начала 2000-х годов.
Давайте-ка вместе попробуем разобраться, что она из себя представляет и что это за «зверь» такой? Рассматривать мы будем микросхему TL494 (Texas Instruments).
И так, для начала посмотрим, что у неё внутри.

Состав.
В её составе имеется:
— генератор пилообразного напряжения (ГПН);
— компаратор регулировки мертвого времени (DA1);
— компаратор регулировки ШИМ (DA2);
— усилитель ошибки 1 (DA3), используется в основном по напряжению;
— усилитель ошибки 2 (DA4), используется в основном по сигналу ограничения тока;
— стабильный источник опорного напряжения (ИОН) на 5В с внешним выводом 14;
— схема управления работой выходного каскада.
Потом все её составные части мы конечно рассмотрим и постараемся разобраться, для чего всё это нужно и как всё это работает, но для начала необходимо будет привести её рабочие параметры (характеристики).
Рекомендуемые рабочие параметры.
| Параметры | Мин. | Макс. | Ед. Изм. |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура TL494C TL494I |
0 | 70 | °C |
| -40 | 85 | °C |
Предельные её характеристики следующие;
Напряжение питания……………………………………………..41В
Входное напряжение усилителя………………………………(Vcc+0.3)В
Выходное напряжение коллектора…………………………..41В
Выходной ток коллектора………………………………………250мА
Общая мощность рассеивания в непрерывном режиме….1Вт
Расположение и назначение выводов микросхемы.
Вывод 1
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Вывод 2
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Вывод 3
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (> ~ 3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Вывод 4
Он управляет диапазоном изменения «мёртвого» времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении «мёртвого» времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину «мёртвого» времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое «мёртвое» время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор — элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без «мёртвого» времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего — прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется «мёртвым» временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если «посадить» вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада — 47,5-48%.
Вывод 5
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Вывод 6
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;

Где F, R, C — кГц, кОм, мкФ. Для двухтактного режима работы формула имеет следующий вид;

Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением — цифру 1 необходимо будет поменять на 1,1.
Вывод 7
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
Вывод 8
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Вывод 9
Это вывод эмиттера транзистора 1.
Вывод 10
Это вывод эмиттера транзистора 2.
Вывод 11
Это коллектор транзистора 2.
Вывод 12
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Вывод 13
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Вывод 14
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Вывод 15
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Вывод 16
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Принцип работы микросхемы.
Так как же работает ШИМ-контроллер TL494.
Выше мы подробно рассмотрели назначение выводов этой микросхемы и какую функцию они выполняют.
Если всё это тщательно проанализировать, то из всего этого становится ясно, как работает эта микросхема. Но я ещё раз очень кратко опишу принцип её работы.
При типовом включении микросхемы и подаче на неё питания (минус на вывод 7, плюс на вывод 12), ГПН начинает вырабатывать пилообразные импульсы, амплитудой около 3-х вольт, частота которых зависит от подключенных С и R к выводам 5 и 6 микросхемы.
Если величина управляющих сигналов (на выводе 3 и 4) меньше 3-х вольт, то на выходных ключах микросхемы появляются прямоугольные импульсы, ширина которых (скважность) зависит от величины управляющих сигналов на выводе 3 и 4.
То есть в микросхеме идёт сравнение положительного пилообразного напряжения с конденсатора Ct (C1) с любым из двух управляющих сигналов.
Логические схемы управления выходными транзисторами VT1 и VT2, открывают их только тогда, когда напряжение пилообразных импульсов выше сигналов управления. И чем больше эта разница, тем шире выходной импульс (больше скважность).
Управляющее напряжение на выводе 3 в свою очередь зависит от сигналов на входах операционных усилителей (усилителей ошибок), которые в свою очередь могут контролировать выходное напряжение и выходной ток БП.
Таким образом, увеличение или уменьшение величины какого либо управляющего сигнала, вызывает соответственно линейное уменьшение или увеличение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов, как уже было сказано выше, может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи непосредственно с вывода 3.
Теория, как говорится теорией, но гораздо будет лучше всё это посмотреть и «пощупать» на практике, поэтому соберём на макетной плате следующую схемку и посмотрим воочию, как всё это работает.
Самый простой и быстрый способ — собрать всё это на макетной плате. Да, микросхему я поставил КА7500. Вывод «13» микросхемы посадил на общий провод, то есть у нас выходные ключи будут работать в однотактном режиме (сигналы на транзисторах будут одинаковыми), а частота повторения выходных импульсов, будет соответствовать частоте пилообразного напряжения ГПН.
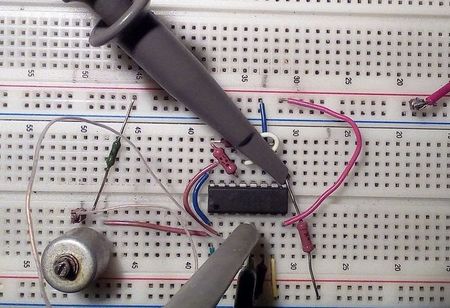
Осциллограф я подключил к следующим контрольным точкам:
— Первый луч к выводу «4», для контроля постоянного напряжения на этом выводе. Находится в центре экрана на нулевой линии. Чувствительность — 1 вольт на деление;
— Второй луч к выводу «5», для контроля пилообразного напряжения ГПН. Находится он так же на нулевой линии (совмещены оба луча) в центре осциллографа и с такой же чувствительностью;
— Третий луч на выход микросхемы к выводу «9», для контроля импульсов на выходе микросхемы. Чувствительность луча 5 вольт на деление (0,5 вольт, плюс делитель на 10). Находится в нижней части экрана осциллографа.

Забыл сказать, выходные ключи микросхемы подключены с общим коллектором. По другому сказать — по схеме эмиттерного повторителя. Почему повторителя? Потому что сигнал на эмиттере транзистора в точности повторяет сигнал базы, чтобы нам всё было хорошо видно.
Если снимать сигнал с коллектора транзистора, то он будет инвертирован (перевёрнут) по отношению к сигналу базы.
Подаём питание на микросхему и смотрим что у нас имеется на выводах.

На четвёртой ножке у нас ноль (бегунок подстроечного резистора в крайнем нижнем положении), первый луч находится на нулевой линии в центре экрана. Усилители ошибки тоже не работают.
На пятой ножке мы видим пилообразное напряжение ГПН (второй луч), амплитудой чуть больше 3-х вольт.
На выходе микросхемы (вывод 9) мы видим прямоугольные импульсы, амплитудой около 15-ти вольт и максимальной ширины (96%). Точки в нижней части экрана — это как раз фиксированный порог скважности и есть. Чтобы его было лучше видно, включим растяжку на осциллографе.

Ну вот, сейчас видно лучше. Это как раз и есть время, когда амплитуда импульса падает до нуля и выходной транзистор закрыт это короткое время. Уровень нуля для этого луча в нижней части экрана.
Ну что, давайте добавим напряжение на вывод «4» и посмотрим что у нас получается.

На выводе «4» подстроечным резистором я установил постоянное напряжение величиной 1 вольт, первый луч поднялся на одно деление (прямая линия на экране осциллографа). Что мы видим? Мёртвое время увеличилось (уменьшилась скважность), это пунктирная линия в нижней части экрана. То есть выходной транзистор закрыт на время уже примерно на половину длительности самого импульса.
Добавим ещё один вольт подстроечным резистором на вывод «4» микросхемы.

Мы видим, что первый луч поднялся ещё на одно деление вверх, длительность выходных импульсов стала ещё меньше (1/3 от длительности всего импульса), а мёртвое время (время закрытия выходного транзистора) увеличилось до двух третьей. То есть наглядно видно, что логика микросхемы сравнивает уровень сигнала ГПН с уровнем управляющего сигнала, и пропускает на выход только тот сигнал ГПН, уровень которого выше управляющего сигнала.
Чтобы стало ещё понятней — длительность (ширина) выходных импульсов микросхемы будет такой, какой является длительность (ширина) выходных импульсов пилообразного напряжения находящихся выше уровня управляющего сигнала (выше прямой линии на экране осциллографа).

Идём дальше, добавляем ещё один вольт на вывод «4» микросхемы. Что мы видим? На выходе микросхемы очень короткие импульсы, по ширине примерно такие же, как и выступающие выше прямой линии верхушки пилообразного напряжения. Включим растяжку на осциллографе, чтобы импульс было лучше видно.

Вот, мы видим короткий импульс, в течении которого выходной транзистор будет открыт, а всё остальное время (нижняя линия на экране) будет закрыт.
Ну что, попробуем поднять напряжение на выводе «4» ещё больше. Ставим подстроечным резистором напряжение на выводе выше уровня пилообразного напряжения ГПН.

Ну всё, БП у нас перестанет работать, так как на выходе полный «штиль». Выходных импульсов нет, так как на управляющем выводе «4» у нас постоянное напряжение уровнем больше 3,3 вольта.
Абсолютно то же самое будет, если подавать управляющий сигнал и на вывод «3», или на какой либо усилитель ошибки. Кому интересно, можете сами проверить опытным путём. Притом, если управляющие сигналы будут сразу на всех управляющих выводах, управлять микросхемой (преобладать), будет сигнал с того управляющего вывода, амплитуда которого больше.
Ну что, давайте попробуем отключить вывод «13» от общего провода и подсоединить его к выводу «14», то есть переключить режим работы выходных ключей из однотактного в двухтактный. Посмотрим, что у нас получится.

Подстроечным резистором выводим опять напряжение на выводе «4» на ноль. Включаем питание. Что мы видим?
На выходе микросхемы так же присутствуют прямоугольные импульсы максимальной длительности, но их частота следования стала в два раза меньше частоты пилообразных импульсов.
Такие же самые импульсы будут и на втором ключевом транзисторе микросхемы (вывод 10), с той лишь разницей, что они будут сдвинуты по времени относительно этих на 180 градусов.
Здесь так же присутствует максимальный порог скважности (2%). Сейчас его не видно, нужно подключать 4-й луч осциллографа и совмещать вместе два выходных сигнала. Щупа четвёртого нет под рукой, поэтому этого не сделал. Кто хочет, проверьте практически сами, чтобы в этом удостовериться.
В таком режиме микросхема работает точно так же, как и в однотактном режиме, лишь с той разницей, что максимальная длительность выходных импульсов здесь не будет превышать 48% от общей длительности импульса.
Так что долго рассматривать этот режим мы не будем, а просто посмотрим, какие у нас будут импульсы при напряжении на выводе «4» в два вольта.

Поднимаем напряжение подстроечным резистором. Ширина выходных импульсов уменьшилась до 1/6 общей длительности импульса, то есть тоже ровно в два раза, чем в однотактном режиме работы выходных ключей (там в 1/3 раза).
На выводе второго транзистора (вывод 10) будут такие же импульсы, только сдвинутые по времени на 180 градусов.
Ну вот в принципе мы и разобрали работу ШИМ контроллера.
Ещё по выводу «4». Как говорилось раньше, этот вывод можно использовать для «мягкого» старта блока питания. Как это организовать?
Очень просто. Для этого подключаем к выводу «4» RC цепочку. Вот например фрагмент схемы:
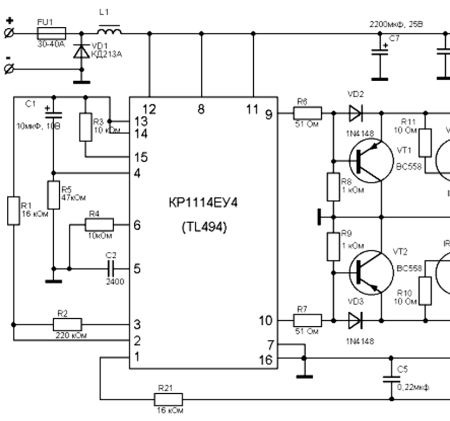
Как здесь работает «мягкий старт»? Смотрим схему. Конденсатор С1 через резистор R5 подключен к ИОН (+5 вольт).
При подаче питания на микросхему (вывод 12), на выводе 14 появляется +5 вольт. Начинает заряжаться конденсатор С1. Через резистор R5 протекает зарядный ток конденсатора, в момент включения он максимальный (конденсатор разряжен) и на резисторе возникает падение напряжения 5 вольт, которое подаётся на вывод «4». Это напряжение, как мы уже выяснили опытным путём, запрещает прохождение импульсов на выход микросхемы.
По мере заряда конденсатора, зарядный ток уменьшается и соответственно уменьшается и падение напряжения на резисторе. Напряжение на выводе «4» также уменьшается и на выходе микросхемы начинают появляться импульсы, длительность которых постепенно увеличивается (по мере заряда конденсатора). Когда конденсатор зарядится полностью — зарядный ток прекращается, напряжение на выводе «4» становится близко к нулю, и вывод «4» больше не оказывает влияния на длительность выходных импульсов. Блок питания выходит на свой рабочий режим.
Естественно Вы догадались, что время запуска БП (выхода его на рабочий режим) будет зависеть от величины резистора и конденсатора, и их подбором можно будет регулировать это время.
Ну вот, это кратко вся теория и практика, и ничего здесь особо сложного нет, и если Вы поймёте и разберётесь в работе этого ШИМ-а, то Вам не составит никакого труда разобраться и понять работу других ШИМ-ов.
Желаю всем удачи.
Время на прочтение
10 мин
Количество просмотров 381K
Всем привет!
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.

Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
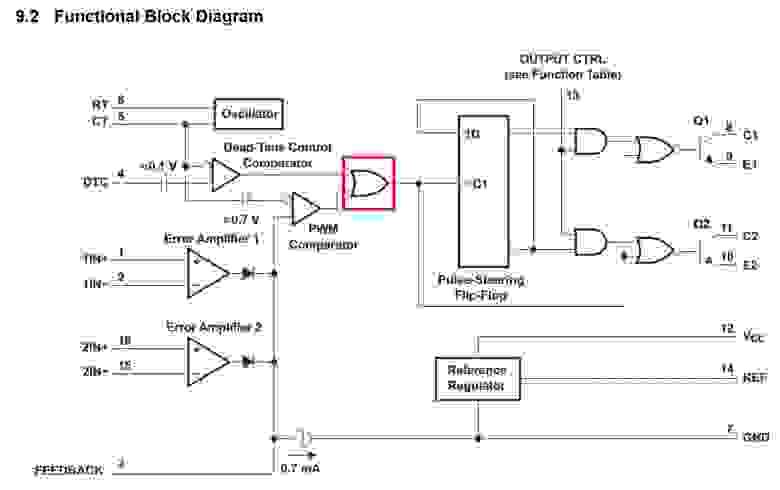
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
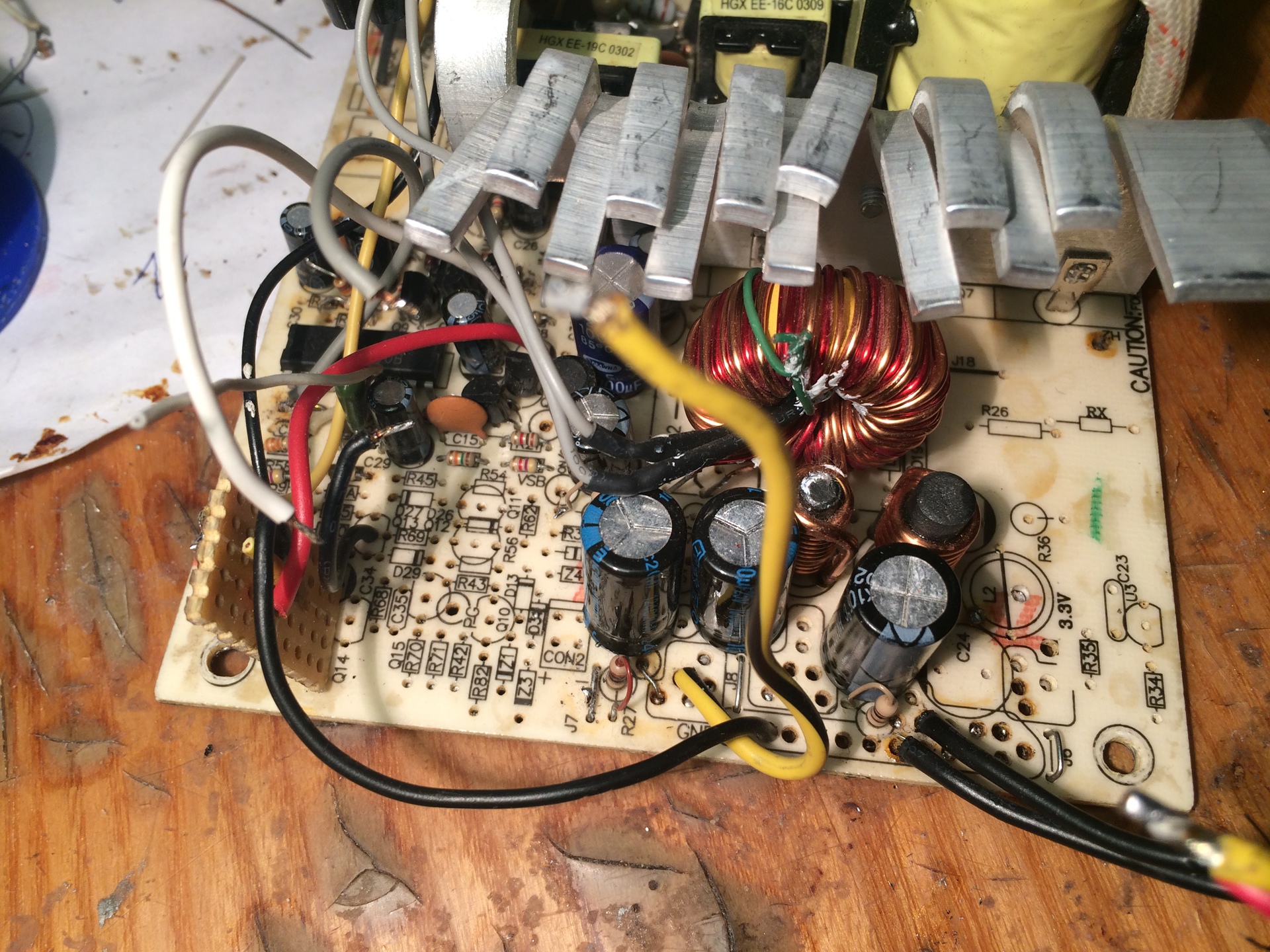
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
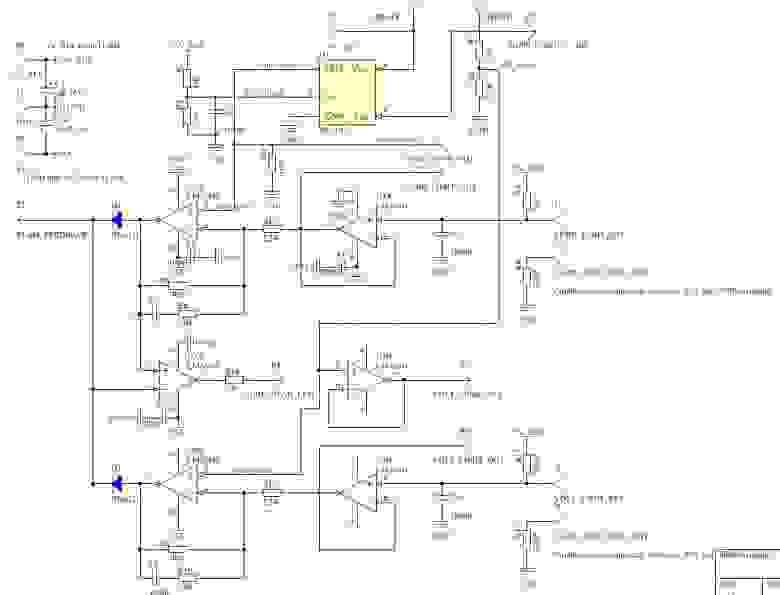
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
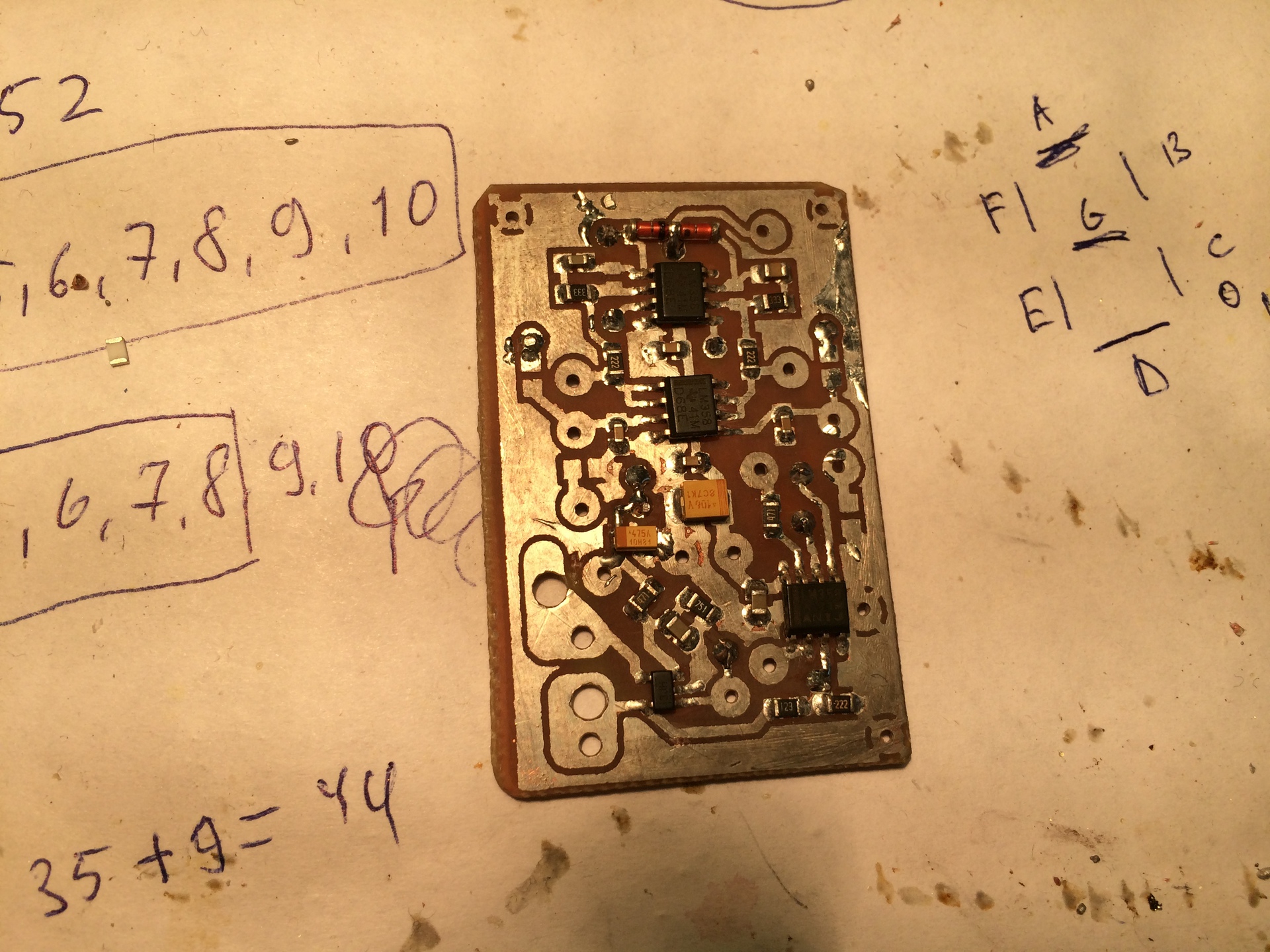
Она встраивается в БП вот таким образом:

В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!

Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
ШИМ UC3842AN
Материал сделан на основе статьи «Обратноходовой преобразователь» Автор Дмитрий Макашев, скачать
для удобства специалистов по ремонту из материала исключены теоретические выкладки. Листать большой документ не всегда есть время, из статьи Макашева взяты только цитаты, для полноты иногда требуется обращение к первоисточнику.

Рис. 1 Структрурная схема.

Рис. 2 Принципиальная схема.
Входной конденсатор (C1).
Грубо можно сказать, что достаточно 1-2uF на ватт выходной мощности при стандартной сети 220VAC±20%, и 2-3uF на ватт при универсальной сети 85-270VAC. Для примера при выходной мощности 24Вт расчетная емкость конденсатора 31 мкФ*400В
Частотозадающие элементы (C5 и R8).
В этих микросхемах реализован задающий генератор на следующем принципе. Сначала конденсатор С5 медленно заряжается через резистор R8 от опорного напряжения, а затем быстро разряжается внутренним ключом с фиксированным током разряда (8.3mA typ.). Время разряда конденсатора через внутренний ключ определяет «мертвое» время – когда силовой ключ всегда закрыт. Соответственно, варьируя величины R8 и С5 можно не только задавать частоту преобразования, но и максимальное значение рабочего хода. В данном случае нам интересно получить как можно меньшее «мертвое» время, что бы максимально приблизить наш коэффициент заполнения D к 50%, конденсатор желательно иметь как можно меньшей емкости, а R8 должен быть как можно больше, исходя из графика в спецификации желательно его иметь в районе 25-30К.
Элементы в цепи управления силовым ключом (R9, D3).
Смысл этой цепочки – замедлить включение силового транзистора, оставив максимально возможную скорость его выключения – или даже увеличить ее (что особенно актуально для DC-DC конверторов). Мы ограничиваем ток заряда затвора резистором R9 и быстро разряжаем емкость затвора через диод D3. Диод D3 может быть любым быстродействующим, никаких особых требований к нему не предъявляется – широко распространенные BAS16 или 1N4148 вполне подойдут. Выбор резистора R9 более сложен. С одной стороны желательно максимально уменьшить скорость открывания силового ключа для снижения помех от быстрого разряда паразитной емкости трансформатора, а с другой – не допустить катастрофического возрастания динамических потерь в режиме короткого замыкания, когда блок неизбежно переходит в режим безразрывных токов (Continuous Mode).
Датчик тока и его цепи (R11, R10, C7).
Датчик тока необходимо выбрать таким образом, что бы с одной стороны гарантировать нормальную работу блока при номинальной нагрузке, а с другой – начать ограничивать ток при как можно меньшей перегрузке.
Цепочка R10, C7 служит для подавления выброса на токовом сигнале от форсированного заряда паразитной емкости трансформатора. Этот выброс никак не влияет на работу токовой защиты, но успешно сбивает контроллер, работающий в токовом режиме. Опять же, постоянная времени этой цепочки должна быть того же порядка, что и длительность выброса, оценочно посчитанная при расчете резистора R9, т.е. приблизительно 180ns.
Схема питания контроллера (D1, R4, C3).
После запуска ШИМ – контроллера, когда напряжение его питания достигло порога включения, подключаются все его внутренние схемы, и потребление резко возрастает. Кроме того, начинают поступать импульсы на затвор силового транзистора, и дополнительный ток потребляется на перезаряд его емкости. Выходное напряжение в начальный момент равно нулю, и начинает плавно возрастать по мере заряда выходных конденсаторов. Сейчас ШИМ – контроллер работает в режиме ограничения тока – длительность выходных импульсов определяется напряжением на датчике тока, а цепь обратной связи не работает, поскольку выходное напряжение еще не достигло нормы. Напряжение на обмотке питания также низко, и контроллер питается от энергии запасенной в конденсаторе C3. Соответственно, энергии в нем должно хватить на все время переходного процесса, и оно должно быть тем больше, чем больше емкость на выходе блока. Соответственно, если использовать обычный алюминиевый конденсатор 100мкФ *25В, то можно быть уверенным, что наш блок будет устойчиво запускаться при суммарной выходной емкости до 4700мкФ.
… К сожалению, на практике эта логика отработки короткого замыкания может давать сбои. Проблема связана с трансформированием колебаний от индуктивности рассеяния первичной обмотки на обмотку питания – при перегрузке эти выбросы заряжают С3 и не дают контроллеру выключаться. Поэтому для минимизации их влияния вводят интегрирующие элементы в цепь питающей обмотки, в нашем случае это резистор R4. Иногда ставят дополнительный RC фильтр с постоянной времени большей чем постоянная времени цепи индуктивность рассеяния – паразитная емкость трансформатора. Вместо резистора можно также использовать или активный фильтр, или, лучше, небольшую индуктивность.
Проблема выбора резистора R4 достаточно сложна – с одной стороны он должен быть достаточно большим для эффективного интегрирования паразитных выбросов, а с другой стороны – не создавать слишком большого падения напряжения в режимах, близких к холостому ходу. Обычно его номинал составляет (10..47)Ом. Особенно сложно решить эту дилемму при низком собственном потреблении ШИМ – контроллера: если на стандартных микросхемах UC384(2-5) в большинстве случаев можно обойтись одним резистором, то на микропотребляющих клонах серии типа UCC3813 приходится использовать уже индуктивность (но она получается достаточно миниатюрной – ток через нее ничтожен, а индуктивность невелика, как правило (10..47)мкГн).
То есть интегрирующую цепь следует подбирать таким образом, что бы блок устойчиво работал при минимально возможной нагрузке, и стабильно уходил в перезапуск при коротком замыкании – и обязательно во всем диапазоне питающих напряжений.
Цепь подавления выброса от индуктивности рассеяния (D2, R3, C2).
Напряжение на демпфере в нашем случае желательно иметь не более 220V, тогда при максимальном входном напряжении 264VAC (372VDC) напряжение на стоке силового ключа будет близко к максимально допустимому. Конденсатор С2 должен иметь достаточно большую емкость что бы пульсации на нем были невелики, но и выше определенного предела выбирать этот конденсатор нет никакого смысла – увеличиваются габариты и цена. В нашем случае вполне разумным будет выбрать С2 как керамический конденсатор размера 1206 0.01мкФ*500В. Логично использовать три последовательно соединенных резистора размера 1206, поскольку помимо рассеивания мощности напряжение велико Vcl для одиночного резистора 1206. Будем использовать три последовательно соединенных резистора 1206 27К 5%.
Когда используем «медленный» диод в демпфере, надо уделять особое внимание режимам с малым током нагрузки, когда из-за слишком малого времени передачи энергии в нагрузку конденсатор C2 будет перезаряжаться током намагничивания, вызывая сильный нагрев силового ключа и трансформатора. Поэтому никогда не используйте в демпфере диодов с ненормированным временем восстановления, например дешевых и распространенных 1N4007! Даже если покажется, что он ведет себя адекватно, можно легко заработать головную боль при определенном сочетании входного напряжения и тока нагрузки.
Выходной диод (D4).
Для низких выходных напряжений рационально использовать диоды Шоттки, как обладающие низким прямым падением напряжения и отличными частотными свойствами. При более высоких выходах, начиная примерно от 24V, используют сверхбыстрые диоды – широко распространенные диоды Шоттки выпускаются на напряжение только до 100V. Обратим внимание, что рассеиваемая на выходном диоде уже весьма значительна, и надо уделять особое внимание вопросу отвода тепла от диода. При закрывании диода и резком нарастании напряжения на нем возникает высокочастотный дребезг на колебательном контуре, образованном индуктивностью рассеяния трансформатора, паразитной емкостью трансформатора, и собственной паразитной емкостью выходного диода. Поэтому иногда параллельно D4 ставят демпфирующую R C цепочку.
Конденсатор фильтра (С8).
Конденсатор фильтра должен обладать двумя свойствами. Во-первых, его емкость должна быть достаточно велика, чтобы мы могли получить стабильную петлю обратной связи. Если резко снизить выходной ток от номинального значения до нуля, то ШИМ – контроллеру потребуется, как правило, 10 – 20 тактов частоты преобразования для снижения коэффициента заполнения. Чем больше емкость выходного конденсатора, тем меньше будет амплитуда выброса при резком сбросе/набросе нагрузки (но больше его длительность), и тем легче будет получить стабильную петлю обратной связи. Кроме того, большая емкость снизит амплитуду выходных пульсаций, но затруднит старт блока и заставит увеличивать емкость на питании ШИМ – контроллера. Значимость каждого из этих факторов придется оценивать в каждом конкретном случае. Во-вторых, выходной конденсатор должен обладать достаточно малым эквивалентным последовательным сопротивлением (ESR) для безболезненного пропускания большого импульсного тока.
Дополнительный фильтр (L1, C9).
Как правило, пульсации на конденсаторе фильтра слишком велики для потребителя, и приходится их дополнительно сглаживать. Для низковольтных применений используется дополнительный LC фильтр, а для высоковольтных с низкими токами – RC фильтр. Рассмотрим расчет LC фильтра как наиболее широко распространенного. Для минимального влияния на стабильность петли обратной связи дополнительный LC фильтр должен иметь как можно более высокую собственную резонансную частоту, во всяком случае не меньше 1/5 частоты преобразования. Кроме того, слишком большая индуктивность приведет к увеличению размеров дросселя и увеличению потерь в его обмотке от протекания выходного тока.
Усилитель ошибки и его цепи (U3, R14, R15).
В качестве усилителя ошибки в подавляющем большинстве SMPS используется интегральная микросхема TL431 и ее клоны (микропотребляющие, низковольтовые и пр.). Логика работы данной микросхемы крайне проста. Пока напряжение на управляющем электроде не превышает опорного напряжения (для основной серии V = 2.5V), ток через микросхему не течет. По достижении опорного Ref.напряжения TL431 начинает пропускать через себя ток с очень высоким коэффициентом усиления. Соответственно, делитель на резисторах R14, R15 настраивается таким образом, чтобы при номинальном выходном напряжении напряжение на управляющем электроде в точности соответствовало опорному.
Оптрон гальванической развязки и его цепи (U3, R16, R7, R12).
Сначала рассмотрим часть схемы на первичной стороне. Ток через оптотранзистор будет максимальным в случае, когда напряжение на выходе усилителя ошибки ШИМ – контроллера (вывод 1) будет равно нулю. Этот ток будет равен напряжению на инвертирующем входе усилителя ошибки (вывод 2, в нашем случае 2.5V) поделенное на сопротивление параллельно соединенных R5 и R7. Сопротивления резисторов R5 и R7 рекомендуется выбирать равными – в этом случае мы сможем контролировать напряжение на выходе усилителя ошибки вплоть до 5V, то есть с приличным запасом. Эти резисторы не должны быть слишком большими для сохранения устойчивости схемы к помехам, но слишком малая их величина может создать излишнюю нагрузку на ШИМ – контроллер. Максимальный ток через оптрон в (0.5..1)mA можно считать удачным компромиссом в случае использования UC3844A. Остановимся на токе 0.5mA – это определит номиналы R5 и R7: R5 = R7 = 10K. Минимальный ток через оптотранзистор теоретически может быть равным нулю – если напряжение на выходе усилителя ошибки достигнет 5V. Но в установившемся режиме этого не происходит – максимальное напряжение оказывается равным немногим более 3V (определяется максимальным сигналом на токовом входе через коэффициент Gain).
Элементы коррекции петли обратной связи (C4, C10, R14).
Собственно, корректирующими элементами являются только C10 и R14, а конденсатор С4 служит для повышения устойчивости ШИМ – контроллера к помехам.
Номинал конденсатора C4 невелик – всего сотни пикофарад, обычно от 100pF до 470pF — это исключает его влияние на частотную характеристику петли обратной связи.
Для обратноходовой топологии, работающей в токовом режиме, всего два корректирующих элемента, и проще их подобрать анализируя реакцию блока на возмущающее воздействие – например, на резко изменяющуюся нагрузку. Как показывает практика, такой подход вполне себя оправдывает – в конце концов отработка возмущающих воздействий – прямая обязанность петли обратной связи. Последующая проверка на специальном оборудовании для непосредственного измерения АЧХ/ФЧХ показывает, что этот метод дает результат, очень близкий к оптимальному.
Конденсатор подавления помех С11.
С точки зрения работоспособности самого блока питания выбор емкости помехоподавляющего конденсатора чрезвычайно прост – чем больше, тем лучше. Поэтому на первый план выходят другие ограничения. В случае сетевого источника питания этим ограничением являются требования стандартов электробезопасности. В этом случае в качестве C11 стандартами разрешается использовать исключительно сертифицированные конденсаторы (так называемый «Class Y1»). Максимальная их емкость – 4.7nF, что соответствует максимально допустимому току утечки из сети к потребителю. С другой стороны, разработчику источника питания хочется иметь минимально возможный импеданс для цепи возврата паразитного тока через межобмоточную емкость трансформатора. Поэтому для мощностей выше пары десятков ватт стараются использовать конденсатор С11 емкостью 4.7nF. В любом случае конденсатор C11 должен подключаться как можно ближе к трансформатору, и проводниками с минимальной индуктивностью. Ведь его емкость плюс паразитная емкость трансформатора вместе с индуктивностью проводников образует чрезвычайно высокодобротный, легко генерирующий высокочастотные колебания при прохождении паразитного импульсного тока. Поэтому лучше всего помехоподавляющий конденсатор подсоединять на максимально развитые полигоны, подсоединенные к датчику тока первичной стороны, и к «земляному» концу трансформатора на вторичной стороне.
Нашел в интернете схему дифференциального усилителя, добавил резистор R8, и схема заработала идеально. Коэффициент усиления также 5, только теперь другая крайность, усилитель чисто дифференциальный, и при равенстве входных напряжений на выходе 0. А при разности сигналов, допустим, в 0,05В, на выходе ОУ 250мВ. Только не пойму, почему первая схема дает 1В на выходе при равенстве входных напряжений и величине входных напряжений 1В, а вторая не дает 1В на выходе, хотя отличие всего-лишь в одном резисторе и то как делителя.
В первой схеме, при изменении V8 Ку=1+R6/R5, что составит +5, а при изменении V9 Ку=-R6/R5, что составит -4. Вот поэтому Вы и «теряете» 50 мВ.
Простой дифф усилитель с дополнительным резистором R8 имеет при изменении V8 Ку=1/(1+R7/R8)*(1+R6/R5), что составит +5, а при изменении V9 Ку=-R6/R5, что составит -5. Поэтому при равенстве V8=V9 выход и будет 0, а разница входов в 50 мВ даст разницу на выходе 250 мВ, как и должно получиться.
У простого дифф усилителя по Вашей схеме Rвх- будет 10 кОм, а Rвх+ целых 60 кОм. Если у Вас источники сигналов с низким выходным сопротивлением, вроде идеальных батарей V8, V9, то результат будет точным. Если какие-то реальные источники с выходным сопротивлением, например, 1 кОм, точность упадет.
Вам какой результат-то нужен? Чтобы при V8=1 и V9=1 на выходе было 1? Или 0?
P.S. И еще, использование первой схемы в цепи ООС любого другого устройства даст Вам разные характеристики управления, как частотные, так и по глубине, для уставки и для петли ООС. Про это не нужно забывать.
Добавка:
Сейчас есть хорошие разностные (difference) усилители, вроде AD628 и инструментальные вроде AD8227. Уставку заводят на REF. Если посмотрите, как они устроены, то многое станет понятнее.
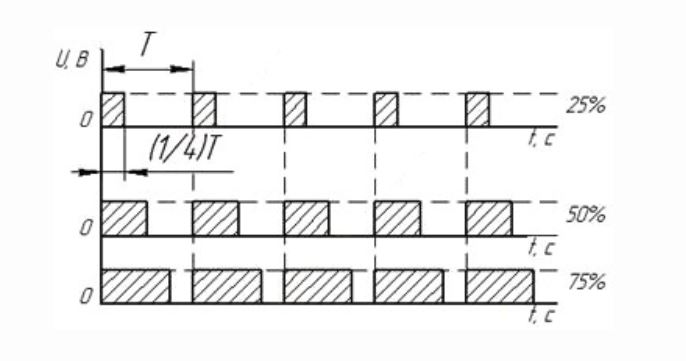
Что такое ШИМ (широтно-импульсная модуляция)
При широтно-импульсной модуляции исходного сигнала неизменными остаются амплитуда, частота и фаза исходного сигнала. Изменению под действием информационного сигнала подвергается длительность (ширина) прямоугольного импульса. В англоязычной технической литературе обозначается аббревиатурой PWM – pulse-width modulation.
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Характеристики ШИМ
Для Широтно-модулированного сигнала характеристик всего две:
- Частота следования импульсов
- Скважность импульсов, или коэффициент заполнения. По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
S=1/T
T – Период сигнала
T=1/f
D=T/1=1/S
F – Частота сигнала
Таким образом, коэффициент заполнения ничто иное как интервал от периода сигнала. Отсюда следует что он (коэффициент заполнения) всегда будет меньше единицы, что не скажешь о скважности – она всегда будет больше 1.
Возьмем пример:
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Формирование ШИМ-сигналов
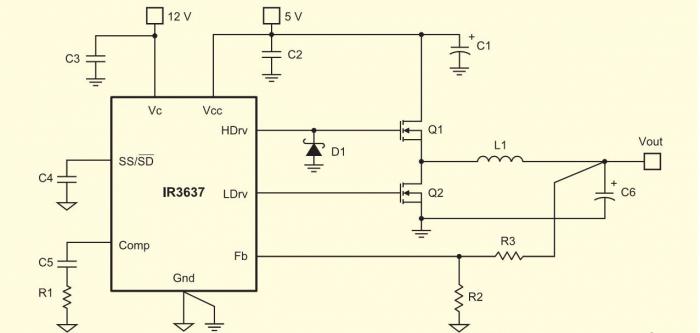
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием – выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Состав.
В её составе имеется:
— генератор пилообразного напряжения (ГПН);
— компаратор регулировки мертвого времени (DA1);
— компаратор регулировки ШИМ (DA2);
— усилитель ошибки 1 (DA3), используется в основном по напряжению;
— усилитель ошибки 2 (DA4), используется в основном по сигналу ограничения тока;
— стабильный источник опорного напряжения (ИОН) на 5В с внешним выводом 14;
— схема управления работой выходного каскада.
Потом все её составные части мы конечно рассмотрим и постараемся разобраться, для чего всё это нужно и как всё это работает, но для начала необходимо будет привести её рабочие параметры (характеристики).
Рекомендуемые рабочие параметры.
| Параметры | Мин. | Макс. | Ед. Изм. |
| VCC Напряжение питания | 7 | 40 | В |
| VI Напряжение на входе усилителя | -0,3 | VCC – 2 | В |
| VO Напряжение на коллекторе | 40 | В | |
| Ток коллектора (каждого транзистора) | 200 | мА | |
| Ток обратной связи | 0,3 | мА | |
| fOSC Частота генератора | 1 | 300 | кГц |
| CT Емкость конденсатора генератора | 0,47 | 10000 | нФ |
| RT Сопротивление резистора генератора | 1,8 | 500 | кОм |
| TA Рабочая температура TL494C TL494I |
0 | 70 | °C |
| -40 | 85 | °C |
Предельные её характеристики следующие;
Напряжение питания……………………………………………..41В
Входное напряжение усилителя………………………………(Vcc+0.3)В
Выходное напряжение коллектора…………………………..41В
Выходной ток коллектора………………………………………250мА
Общая мощность рассеивания в непрерывном режиме….1Вт
Расположение и назначение выводов микросхемы.
Вывод 1
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Вывод 2
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Вывод 3
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (> ~ 3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Вывод 4
Он управляет диапазоном изменения «мёртвого» времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении «мёртвого» времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину «мёртвого» времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое «мёртвое» время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор — элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без «мёртвого» времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего — прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется «мёртвым» временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если «посадить» вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада — 47,5-48%.
Вывод 5
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Вывод 6
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;
Где F, R, C — кГц, кОм, мкФ. Для двухтактного режима работы формула имеет следующий вид;
Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением — цифру 1 необходимо будет поменять на 1,1.
Вывод 7
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
Вывод 8
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Вывод 9
Это вывод эмиттера транзистора 1.
Вывод 10
Это вывод эмиттера транзистора 2.
Вывод 11
Это коллектор транзистора 2.
Вывод 12
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Вывод 13
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Вывод 14
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Вывод 15
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Вывод 16
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Принцип работы микросхемы.
Так как же работает ШИМ-контроллер TL494.
Выше мы подробно рассмотрели назначение выводов этой микросхемы и какую функцию они выполняют.
Если всё это тщательно проанализировать, то из всего этого становится ясно, как работает эта микросхема. Но я ещё раз очень кратко опишу принцип её работы.
При типовом включении микросхемы и подаче на неё питания (минус на вывод 7, плюс на вывод 12), ГПН начинает вырабатывать пилообразные импульсы, амплитудой около 3-х вольт, частота которых зависит от подключенных С и R к выводам 5 и 6 микросхемы.
Если величина управляющих сигналов (на выводе 3 и 4) меньше 3-х вольт, то на выходных ключах микросхемы появляются прямоугольные импульсы, ширина которых (скважность) зависит от величины управляющих сигналов на выводе 3 и 4.
То есть в микросхеме идёт сравнение положительного пилообразного напряжения с конденсатора Ct (C1) с любым из двух управляющих сигналов.
Логические схемы управления выходными транзисторами VT1 и VT2, открывают их только тогда, когда напряжение пилообразных импульсов выше сигналов управления. И чем больше эта разница, тем шире выходной импульс (больше скважность).
Управляющее напряжение на выводе 3 в свою очередь зависит от сигналов на входах операционных усилителей (усилителей ошибок), которые в свою очередь могут контролировать выходное напряжение и выходной ток БП.
Таким образом, увеличение или уменьшение величины какого либо управляющего сигнала, вызывает соответственно линейное уменьшение или увеличение ширины импульсов напряжения на выходах микросхемы.
В качестве управляющих сигналов, как уже было сказано выше, может быть использовано напряжение с вывода 4 (управление «мертвым временем»), входы усилителей ошибки или вход сигнала обратной связи непосредственно с вывода 3.
Теория, как говорится теорией, но гораздо будет лучше всё это посмотреть и «пощупать» на практике, поэтому соберём на макетной плате следующую схемку и посмотрим воочию, как всё это работает.
Самый простой и быстрый способ — собрать всё это на макетной плате. Да, микросхему я поставил КА7500. Вывод «13» микросхемы посадил на общий провод, то есть у нас выходные ключи будут работать в однотактном режиме (сигналы на транзисторах будут одинаковыми), а частота повторения выходных импульсов, будет соответствовать частоте пилообразного напряжения ГПН.
Осциллограф я подключил к следующим контрольным точкам:
— Первый луч к выводу «4», для контроля постоянного напряжения на этом выводе. Находится в центре экрана на нулевой линии. Чувствительность — 1 вольт на деление;
— Второй луч к выводу «5», для контроля пилообразного напряжения ГПН. Находится он так же на нулевой линии (совмещены оба луча) в центре осциллографа и с такой же чувствительностью;
— Третий луч на выход микросхемы к выводу «9», для контроля импульсов на выходе микросхемы. Чувствительность луча 5 вольт на деление (0,5 вольт, плюс делитель на 10). Находится в нижней части экрана осциллографа.
Забыл сказать, выходные ключи микросхемы подключены с общим коллектором. По другому сказать — по схеме эмиттерного повторителя. Почему повторителя? Потому что сигнал на эмиттере транзистора в точности повторяет сигнал базы, чтобы нам всё было хорошо видно.
Если снимать сигнал с коллектора транзистора, то он будет инвертирован (перевёрнут) по отношению к сигналу базы.
Подаём питание на микросхему и смотрим что у нас имеется на выводах.
На четвёртой ножке у нас ноль (бегунок подстроечного резистора в крайнем нижнем положении), первый луч находится на нулевой линии в центре экрана. Усилители ошибки тоже не работают.
На пятой ножке мы видим пилообразное напряжение ГПН (второй луч), амплитудой чуть больше 3-х вольт.
На выходе микросхемы (вывод 9) мы видим прямоугольные импульсы, амплитудой около 15-ти вольт и максимальной ширины (96%). Точки в нижней части экрана — это как раз фиксированный порог скважности и есть. Чтобы его было лучше видно, включим растяжку на осциллографе.
Ну вот, сейчас видно лучше. Это как раз и есть время, когда амплитуда импульса падает до нуля и выходной транзистор закрыт это короткое время. Уровень нуля для этого луча в нижней части экрана.
Ну что, давайте добавим напряжение на вывод «4» и посмотрим что у нас получается.
На выводе «4» подстроечным резистором я установил постоянное напряжение величиной 1 вольт, первый луч поднялся на одно деление (прямая линия на экране осциллографа). Что мы видим? Мёртвое время увеличилось (уменьшилась скважность), это пунктирная линия в нижней части экрана. То есть выходной транзистор закрыт на время уже примерно на половину длительности самого импульса.
Добавим ещё один вольт подстроечным резистором на вывод «4» микросхемы.
Мы видим, что первый луч поднялся ещё на одно деление вверх, длительность выходных импульсов стала ещё меньше (1/3 от длительности всего импульса), а мёртвое время (время закрытия выходного транзистора) увеличилось до двух третьей. То есть наглядно видно, что логика микросхемы сравнивает уровень сигнала ГПН с уровнем управляющего сигнала, и пропускает на выход только тот сигнал ГПН, уровень которого выше управляющего сигнала.
Чтобы стало ещё понятней — длительность (ширина) выходных импульсов микросхемы будет такой, какой является длительность (ширина) выходных импульсов пилообразного напряжения находящихся выше уровня управляющего сигнала (выше прямой линии на экране осциллографа).
Идём дальше, добавляем ещё один вольт на вывод «4» микросхемы. Что мы видим? На выходе микросхемы очень короткие импульсы, по ширине примерно такие же, как и выступающие выше прямой линии верхушки пилообразного напряжения. Включим растяжку на осциллографе, чтобы импульс было лучше видно.
Вот, мы видим короткий импульс, в течении которого выходной транзистор будет открыт, а всё остальное время (нижняя линия на экране) будет закрыт.
Ну что, попробуем поднять напряжение на выводе «4» ещё больше. Ставим подстроечным резистором напряжение на выводе выше уровня пилообразного напряжения ГПН.
Ну всё, БП у нас перестанет работать, так как на выходе полный «штиль». Выходных импульсов нет, так как на управляющем выводе «4» у нас постоянное напряжение уровнем больше 3,3 вольта.
Абсолютно то же самое будет, если подавать управляющий сигнал и на вывод «3», или на какой либо усилитель ошибки. Кому интересно, можете сами проверить опытным путём. Притом, если управляющие сигналы будут сразу на всех управляющих выводах, управлять микросхемой (преобладать), будет сигнал с того управляющего вывода, амплитуда которого больше.
Ну что, давайте попробуем отключить вывод «13» от общего провода и подсоединить его к выводу «14», то есть переключить режим работы выходных ключей из однотактного в двухтактный. Посмотрим, что у нас получится.
Подстроечным резистором выводим опять напряжение на выводе «4» на ноль. Включаем питание. Что мы видим?
На выходе микросхемы так же присутствуют прямоугольные импульсы максимальной длительности, но их частота следования стала в два раза меньше частоты пилообразных импульсов.
Такие же самые импульсы будут и на втором ключевом транзисторе микросхемы (вывод 10), с той лишь разницей, что они будут сдвинуты по времени относительно этих на 180 градусов.
Здесь так же присутствует максимальный порог скважности (2%). Сейчас его не видно, нужно подключать 4-й луч осциллографа и совмещать вместе два выходных сигнала. Щупа четвёртого нет под рукой, поэтому этого не сделал. Кто хочет, проверьте практически сами, чтобы в этом удостовериться.
В таком режиме микросхема работает точно так же, как и в однотактном режиме, лишь с той разницей, что максимальная длительность выходных импульсов здесь не будет превышать 48% от общей длительности импульса.
Так что долго рассматривать этот режим мы не будем, а просто посмотрим, какие у нас будут импульсы при напряжении на выводе «4» в два вольта.
Поднимаем напряжение подстроечным резистором. Ширина выходных импульсов уменьшилась до 1/6 общей длительности импульса, то есть тоже ровно в два раза, чем в однотактном режиме работы выходных ключей (там в 1/3 раза).
На выводе второго транзистора (вывод 10) будут такие же импульсы, только сдвинутые по времени на 180 градусов.
Ну вот в принципе мы и разобрали работу ШИМ контроллера.
Ещё по выводу «4». Как говорилось раньше, этот вывод можно использовать для «мягкого» старта блока питания. Как это организовать?
Очень просто. Для этого подключаем к выводу «4» RC цепочку. Вот например фрагмент схемы:
Как здесь работает «мягкий старт»? Смотрим схему. Конденсатор С1 через резистор R5 подключен к ИОН (+5 вольт).
При подаче питания на микросхему (вывод 12), на выводе 14 появляется +5 вольт. Начинает заряжаться конденсатор С1. Через резистор R5 протекает зарядный ток конденсатора, в момент включения он максимальный (конденсатор разряжен) и на резисторе возникает падение напряжения 5 вольт, которое подаётся на вывод «4». Это напряжение, как мы уже выяснили опытным путём, запрещает прохождение импульсов на выход микросхемы.
По мере заряда конденсатора, зарядный ток уменьшается и соответственно уменьшается и падение напряжения на резисторе. Напряжение на выводе «4» также уменьшается и на выходе микросхемы начинают появляться импульсы, длительность которых постепенно увеличивается (по мере заряда конденсатора). Когда конденсатор зарядится полностью — зарядный ток прекращается, напряжение на выводе «4» становится близко к нулю, и вывод «4» больше не оказывает влияния на длительность выходных импульсов. Блок питания выходит на свой рабочий режим.
Естественно Вы догадались, что время запуска БП (выхода его на рабочий режим) будет зависеть от величины резистора и конденсатора, и их подбором можно будет регулировать это время.
Ну вот, это кратко вся теория и практика, и ничего здесь особо сложного нет, и если Вы поймёте и разберётесь в работе этого ШИМ-а, то Вам не составит никакого труда разобраться и понять работу других ШИМ-ов.
Желаю всем удачи.
Время на прочтение
10 мин
Количество просмотров 381K
Всем привет!
Сегодня хотел бы рассказать Вам о своём опыте переделки самого обычного китайского БП ATX в регулируемый источник питания со стабилизацией тока и напряжения(0-20А, 0-24В).
В этой статье мы подробно рассмотрим работу ШИМ контроллера TL494, обратной связи и пробежимся по модернизации схемы БП и разработке самодельной платы усилителей ошибок по напряжению и току.
Честно признаться, сейчас я даже не могу назвать модель подопытного БП. Какой-то из многочисленных дешевых 300W P4 ready. Надеюсь, не нужно напоминать, что на деле эти 300W означают не больше 150, и то с появлением в квартире запаха жареного.
Рассчитываю на то, что мой опыт сможет быть кому-то полезен с практической точки зрения, а потому упор сделаю на теорию. Без нее всё равно не получится переделать БП т.к. в любом случае будут какие-то отличия в схеме и сложности при наладке.
Схема БП ATX
Для начала пройдемся по схеме БП ATX на контроллере TL494(и его многочисленных клонах).
Все схемы очень похожи друг на друга. Гугл выдает их довольно много и кажется я нашел почти соответствующую моему экземпляру.
Ссылка на схему в полном размере
Структурно разделим БП на следующие блоки:
— выпрямитель сетевого напряжения с фильтром
— источник дежурного питания(+5V standby)
— основной источник питания(+12V,-12V,+3.3V,+5V,-5V)
— схема контроля основных напряжений, генерация сигнала PowerGood и защита от КЗ
Выпрямитель с фильтрами это всё что в левом верхнем углу схемы до диодов D1-D4.
Источник дежурного питания собран на трансформаторе Т3 и транзисторах Q3 Q4. Стабилизация построена на обратной связи через опторазвязку U1 и источнике опорного напряжения TL431. Подробно рассматривать работу этой части я не буду т.к. знаю, что слишком длинные статьи читать не очень весело. В конце я дам название книги, где подробно рассмотрены все подробности.
Обратите внимание, в схеме по ошибке и ШИМ контроллер TL494 и ИОН дежурного питания TL431 обозначены как IC1. В дальнейшем я буду упоминать IC1 имея ввиду именно ШИМ контроллер.
Основной источник питания собран на трансформаторе Т1, высоковольтных ключах Q1 Q2, управляющем трансформаторе Т2 и низковольтных ключах Q6 Q7. Всё это дело раскачивается и управляется микросхемой ШИМ контроллера IC1. Понимание принципа работы контроллера и назначения каждого элемента его обвязки — это как раз то, что необходимо для сознательной доработки БП вместо слепого повторения чужих рекомендаций и схем.
Механизм работы примерно таков: ШИМ контроллер, поочередно открывая низковольтные ключи Q6 Q7, создает ЭДС в первичной обмотке трансформатора Т2. Видите, эти ключи питаются низким напряжением от дежурного источника питания? Найдите на схеме R46 и поймете о чем я. ШИМ контроллер также питается от этого дежурного напряжения. Чуть выше я назвал трансформатор Т2 управляющим, но кажется у него есть какое-то более правильное название. Его основная задача — гальваническая развязка низковольтной и высоковольтной части схемы. Вторичные обмотки этого трансформатора управляют высоковольтными ключами Q1 Q2, поочередно открывая их. С помощью такого трюка низковольтный ШИМ контроллер может управлять высоковольтными ключами с соблюдением мер безопасности. Высоковольтные ключи Q1 Q2 в свою очередь раскачивают первичную обмотку трансформатора Т1 и на его вторичных обмотках возникают интересующие нас основные напряжения. Высоковольтными эти ключи называются потому, что коммутируют они выпрямленное сетевое напряжение, а это порядка 300В! Напряжение со вторичных обмоток Т1 выпрямляется и фильтруется с помощью LC фильтров.
Теперь, надеюсь, в целом картину вы себе представляете и мы можем идти дальше.
ШИМ контроллер TL494.
Давайте разберемся как же устроен ШИМ контроллер TL494.
Будет лучше, если вы скачаете даташит www.ti.com/lit/ds/symlink/tl494.pdf, но в принципе я постараюсь вынести из него самое главное с помощью картинок. Для более глубокого понимания всех тонкостей советую вот этот документ: www.ti.com/lit/an/slva001e/slva001e.pdf
Начнем, как это ни странно, с конца — с выходной части микросхемы.
Сейчас всё внимание на выход элемента ИЛИ (помечен красным квадратом).
Выход этого элемента в конкретный момент времени напрямую управляет состоянием одного или обоих сразу ключей Q1 Q2.
Вариант управления задаётся через пин 13(Output control).
Важная вещь №1: если на выходе элемента ИЛИ лог 1 — выходные ключи закрыты(выключены). Это верно для обоих режимов.
Важная вещь №2: если на выходе элемента ИЛИ лог 0 — один из ключей(или оба сразу) открыт(включен).
Вырисовывается следующая картина: по восходящему фронту открытый ранее транзистор закрывается(в этот момент они оба гарантированно закрыты), триггер меняет своё состояние и по нисходящему фронту включается уже другой ключ и будет оставаться включенным пока снова не придет восходящий фронт и не закроет его, в этот момент опять триггер перещёлкивается и следующий нисходящий фронт откроет уже другой транзистор. В single ended режиме ключи всегда работают синхронно и триггер не используется.
Время, когда выход находится в лог. 1(и оба ключа закрыты) называется Dead time.
Отношение длительности импульса(лог. 0, транзистор открыт) к периоду их следования называется коэффициент заполнения(PWM duty cycle). Например если коэффициент 100% то на выходе элемента ИЛИ всегда 0 и транзистор(или оба) всегда открыт.
Простите, но стараюсь объяснять максимально доступно и почти на пальцах, потому что официальным сухим языком это можно и в даташите прочитать.
Ах да, зачем же нужен Dead time? Если коротко: в реальной жизни верхний ключ будет тянуть наверх(к плюсу) а нижний вниз(к минусу). Если открыть их одновременно — будет короткое замыкание. Это называется сквозной ток и из-за паразитных емкостей, индуктивностей и прочих особенностей такой режим возникает даже если вы будете открывать ключи строго по очереди. Чтобы сквозной ток свести к минимуму нужен dead time.
Теперь обратим внимание на генератор пилы(oscillator), который использует выводы 5 и 6 микросхемы для установки частоты.
На эти выводы подключается резистор и конденсатор. Это и есть тот самый RC генератор о котором наверное многие слышали. Теперь на выводе 5(CT) у нас пила от 0 до 3.3В. Как видим, эта пила подается на инвертирующие входы компараторов Dead-time и PWM.
С терминами и работой выходной части ШИМ контроллера более-менее определились, теперь будем разбираться при чем тут пила и зачем нам все эти компараторы и усилители ошибок. Мы поняли, что отношение длительности импульса к периоду их следования определяет коэффициент заполнения, а значит и выходное напряжение источника питания т.к. в первичную обмотку трансформатора будет вкачиваться тем больше энергии, чем больше коэффициент заполнения.
Для примера разберемся, что нужно сделать чтобы установить коэффициент заполнения 50%. Вы еще помните про пилу? Она подается на инвертирующие входы компараторов PWM и Dead time. Известно, что если напряжение на инвертирующем входе выше чем на неинвертирующем — выход компаратора будет лог.0. Напомню, что пила — это плавно поднимающийся от 0 до 3.3в сигнал, после чего резко падающий на 0в.
Таким образом, чтобы на выходе компаратора 50% времени был лог.0 — на неинвертирующий вход нужно подать половину напряжения пилы(3.3в/2=1,65в). Это и даст искомые 50% duty cycle.
Заметили, что оба компаратора сходятся на том самом элементе ИЛИ, а значит, пока какой-то из компараторов выдает лог.1 — другой не может ему помешать. Т.е. приоритет имеет тот компаратор, который приводит к меньшему коэффициенту заполнения. И если на Dead time компаратор напряжение подается снаружи, то на PWM компаратор можно подать сигнал как извне(3 пин) так и с встроенных усилителей ошибок(это обычные операционные усилители). Они тоже соединяются по схеме ИЛИ, но т.к. мы уже имеем дело с аналоговым сигналом — схема ИЛИ реализуется с использованием диодов. Таким образом контроль над коэффициентом заполнения захватывает тот усилитель ошибки, который просит меньший коэффициент заполнения. Состояние другого при этом не имеет значения.
Обратная связь.
Хорошо, теперь как на всём этом построить источник питания? Очень просто! Нужно охватить БП отрицательной обратной связью. Разница между желаемым(заданным) и имеющимся напряжением называется ошибка. Если в каждый момент времени воздействовать на коэффициент заполнения так, чтобы исправить ошибку и привести ее к 0 — получим стабилизацию выходного напряжения(или тока). Обратная связь является отрицательной до тех пор, пока реагирует на ошибку управляющим воздействием с противоположным знаком. Если обратная связь будет положительной — пиши пропало! В таком случае обратная связь будет увеличивать ошибку вместо того чтобы уменьшать ее.
Всё это работа для тех самых усилителей ошибок. На инвертирующий вход усилителя ошибки подается опорное напряжение(эталон), а на неинвертирующий заводится напряжение на выходе источника питания. Кстати внутри ШИМ контроллера есть источник опорного напряжения 5В, который является точкой отсчёта во всех измерениях.
Компенсация обратной связи
Даже не знаю как бы по-проще это объяснить. С обратной связью всё просто только в идеальном мире. На практике же если вы изменяете коэффициент заполнения — выходное напряжение меняется не сразу, а с некоторой задержкой.
К примеру усилитель ошибки зарегистрировал понижение напряжения на выходе, откорректировал коэффициент заполнения и прекратил вмешиваться в систему, но напряжение продолжает нарастать и потом усилитель ошибки вынужден снова корректировать коэффициент заполнения уже в другую сторону. Такая ситуация происходит из-за задержки реакции. Так система может перейти в режим колебаний. Они бывают затухающими и незатухающими. Блок питания в котором могут возникнуть незатухающие колебания сигнала обратной связи — долго не протянет и является нестабильным.
У обратной связи есть определенная полоса пропускания. Допустим полоса 100кГц. Это означает, что если выходное напряжение будет колебаться с частотой выше 100кГц — обратная связь этого просто не заметит и корректировать ничего не будет. Конечно, хотелось бы, чтобы обратная связь реагировала на изменения любой частоты и выходное напряжение было как можно стабильнее. Т.е. борьба идет за то, чтобы обратная связь была максимально широкополосной. Однако та самая задержка реакции не позволит нам сделать полосу бесконечно широкой. И если полоса пропускания цепи обратной связи будет шире чем возможности самого БП на отработку управляющих сигналов(прямая связь) — на некоторых частотах отрицательная обратная связь будет внезапно становиться положительной и вместо компенсации ошибки будет ее еще больше увеличивать, а это как раз условия возникновения колебаний.
Теперь от задержек в секундах давайте перейдем к частотам, коэффициентам усиления и фазовым сдвигам…
Полоса пропускания это максимальная частота, на которой коэффициент усиления больше 1.
С увеличением частоты коэффициент усиления уменьшается. В принципе это справедливо для любого усилителя.
Итак, чтобы наш БП работал стабильно должно выполняться одно условие: во всей полосе частот, где суммарное усиление прямой и обратной связи больше 1(0дБ), отставание по фазе не должно превышать 310 градусов. 180 градусов вносит инвертирующий вход усилителя ошибки.
Вводом в обратную связь различных фильтров добиваются того, чтобы это правило выполнялось. Если очень грубо, то компенсация обратной связи это подгонка полосы пропускания и ФЧХ обратной связи под реакции реального источника питания(под характеристики прямой связи).
Тема эта очень не простая, под ней лежит куча математики, исследований и прочих трудов… Я лишь стараюсь в доступном виде изложить саму суть вопроса. Могу порекомендовать к прочтению вот эту статью, где хоть и не так на пальцах, но тоже в доступном виде освещен этот вопрос и даны ссылки на литературу: bsvi.ru/kompensaciya-obratnoj-svyazi-v-impulsnyx-istochnikax-pitaniya-chast-1
От теории к практике
Теперь мы можем взглянуть на схему БП и понять что в ней много лишнего. В первую очередь я выпаял всё, что относится к контролю выходных напряжений(схема формирования сигнала Power good). Нейтрализовал встроенные в ШИМ контроллер усилители ошибок путем подачи +5vref на инвертирующие входы и посадив на GND неинвертирующие. Удалил штатную схему защиты от КЗ. Выпилил все не нужные выходные фильтры от напряжений которые не используются… Заменил выходные диоды на более мощные. Заменил трансформатор! Выпаял его из качественного БП где написанные 400W действительно означают 400W. Разница в размерах между тем, что стояло тут до этого говорит сама за себя:
Заменил дроссели в выходном фильтре(с того-же 400W БП) и конденсаторы поставил на 25В:
Далее я разработал схему, позволяющую регулировать стабилизацию выходного напряжения и устанавливать ограничение тока выдаваемого БП.
Схема реализует внешние усилители ошибок собранные на операционных усилителях LM358 и несколько дополнительных функций в виде усилителя шунта(INA197) для измерения тока, нескольких буферных усилителей для выдачи величины установленного и измеренного тока и напряжения на другую плату, где собрана цифровая индикация. О ней я расскажу в следующей статье. Выдавать на другую плату сигналы как есть — не лучшее решение т.к. источник сигнала может быть достаточно высокоомным, провод ловит шум, мешая обратной связи работать устойчиво. В первой итерации я с этим столкнулся и пришлось всё переделать. В принципе на схеме всё подписано, подробно комментировать ее не вижу смысла и думаю, что для тех кто понял теорию выше, должно быть всё довольно очевидно.
Отмечу лишь, что цепочки C4R10 и C7R8 это и есть компенсация обратной связи о которой я говорил выше. Честно говоря, в ее настройке очень помогла прекрасная статьи эмбэддера под ником BSVi. bsvi.ru/kompensaciya-obratnoj-svyazi-prakticheskij-podxod Этот подход реально работает и потратив денек-другой мне удалось добиться стабильной работы БП описанным в статье методом. Сейчас, конечно, я бы справился часа за два наверно, но тогда опыта не было и по неосторожности я взорвал не мало транзисторов.
Ах да, обратите внимание на емкость C7! 1uF это довольно много. Сделано это для того, чтобы обратную связь по току зажать в быстродействии. Это такой грязный хак для преодоления нестабильности возникающей на границе перехода от стабилизации напряжения к стабилизации тока. В таких случаях применяют какие-то более навороченные приёмы, но так заморачиваться я не стал. Супер точная стабилизация тока мне не нужна, к тому же к моменту, когда я столкнулся с этой бедой — проект переделки БП успел здорово надоесть!
По этой схеме лазерным утюгом была изготовлена плата:
Она встраивается в БП вот таким образом:
В качестве шунта для измерения тока выбран кусок медной проволоки длинной сантиметров 10 наверно.
Корпус я использовал от довольно качественного БП Hiper. Кажется это самый проветриваемый корпус из всех что я видел.
Также возник вопрос о подключении вентилятора. БП ведь регулируется от 0 до 24В, а значит кулер придется питать от дежурки. Дежурка представлена двумя напряжениями — стабильными 5В, которые идут на материнскую плату и не стабилизированным, служебным питанием около 13.5В которое используется для питания самого ШИМ контроллера и для раскачки управляющего трансформатора. Я использовал обычный линейный стабилизатор чтобы получить стабильные +12В и завёл их на маленькую платку терморегуляции оборотов кулера, выпаянную с того-же Hiper’a. Платку закрепил на радиаторе шурупом просто из соображений удобства подключения кулера.
Радиаторы кстати пришлось изогнуть ибо они не вмещались в корпус нового формата. Лучше перед изгибанием их нагревать паяльной станцией, иначе есть шанс отломать половину зубов. Терморезистор регулятора закрепил на дросселе групповой стабилизации т.к. это самая горячая часть.
В таком виде БП прошел длительные испытания, питая кучу автомобильных лампочек дальнего света и выдерживал нагрузки током порядка 20А при напряжении 14В. А еще он гордо зарядил несколько автомобильных аккумуляторов, когда у нас в Крыму выключали свет.
Будущее уже рядом
Тем временем я задумал немного нестандартную систему индикации режимов работы БП, о чем в последствии немного сожалел, но всё-же она работает!
Так что в следующей статье вас ждет программирование ATMega8 на C++ с применением шаблонной магии, различных паттернов и самописная библиотека для вычислений с фиксированной точкой поверх которой реализовано усреднение отсчётов АЦП и перевод их в напряжение/ток по таблице с линейной интерполяцией. Каким-то чудом всё это уместилось в 5 с копейками килобайт флэша.
Не переключайте канал, должно быть интересно.
Кстати, обещанная в начале книга:
Куличков А.В. «Импульсные блоки питания для IBM PC»
radioportal-pro.ru/_ld/0/15_caf3ebe8f7eaeee.djvu
P.S. Надеюсь, изложенное выше окажется полезным. Строго не судите, но конструктивная критика приветствуется.
Added для RO пользователей которые не могут писать комментарии: email: altersoft_пёс_mail.ру
ШИМ UC3842AN
Материал сделан на основе статьи «Обратноходовой преобразователь» Автор Дмитрий Макашев, скачать
для удобства специалистов по ремонту из материала исключены теоретические выкладки. Листать большой документ не всегда есть время, из статьи Макашева взяты только цитаты, для полноты иногда требуется обращение к первоисточнику.
Рис. 1 Структрурная схема.
Рис. 2 Принципиальная схема.
Входной конденсатор (C1).
Грубо можно сказать, что достаточно 1-2uF на ватт выходной мощности при стандартной сети 220VAC±20%, и 2-3uF на ватт при универсальной сети 85-270VAC. Для примера при выходной мощности 24Вт расчетная емкость конденсатора 31 мкФ*400В
Частотозадающие элементы (C5 и R8).
В этих микросхемах реализован задающий генератор на следующем принципе. Сначала конденсатор С5 медленно заряжается через резистор R8 от опорного напряжения, а затем быстро разряжается внутренним ключом с фиксированным током разряда (8.3mA typ.). Время разряда конденсатора через внутренний ключ определяет «мертвое» время – когда силовой ключ всегда закрыт. Соответственно, варьируя величины R8 и С5 можно не только задавать частоту преобразования, но и максимальное значение рабочего хода. В данном случае нам интересно получить как можно меньшее «мертвое» время, что бы максимально приблизить наш коэффициент заполнения D к 50%, конденсатор желательно иметь как можно меньшей емкости, а R8 должен быть как можно больше, исходя из графика в спецификации желательно его иметь в районе 25-30К.
Элементы в цепи управления силовым ключом (R9, D3).
Смысл этой цепочки – замедлить включение силового транзистора, оставив максимально возможную скорость его выключения – или даже увеличить ее (что особенно актуально для DC-DC конверторов). Мы ограничиваем ток заряда затвора резистором R9 и быстро разряжаем емкость затвора через диод D3. Диод D3 может быть любым быстродействующим, никаких особых требований к нему не предъявляется – широко распространенные BAS16 или 1N4148 вполне подойдут. Выбор резистора R9 более сложен. С одной стороны желательно максимально уменьшить скорость открывания силового ключа для снижения помех от быстрого разряда паразитной емкости трансформатора, а с другой – не допустить катастрофического возрастания динамических потерь в режиме короткого замыкания, когда блок неизбежно переходит в режим безразрывных токов (Continuous Mode).
Датчик тока и его цепи (R11, R10, C7).
Датчик тока необходимо выбрать таким образом, что бы с одной стороны гарантировать нормальную работу блока при номинальной нагрузке, а с другой – начать ограничивать ток при как можно меньшей перегрузке.
Цепочка R10, C7 служит для подавления выброса на токовом сигнале от форсированного заряда паразитной емкости трансформатора. Этот выброс никак не влияет на работу токовой защиты, но успешно сбивает контроллер, работающий в токовом режиме. Опять же, постоянная времени этой цепочки должна быть того же порядка, что и длительность выброса, оценочно посчитанная при расчете резистора R9, т.е. приблизительно 180ns.
Схема питания контроллера (D1, R4, C3).
После запуска ШИМ – контроллера, когда напряжение его питания достигло порога включения, подключаются все его внутренние схемы, и потребление резко возрастает. Кроме того, начинают поступать импульсы на затвор силового транзистора, и дополнительный ток потребляется на перезаряд его емкости. Выходное напряжение в начальный момент равно нулю, и начинает плавно возрастать по мере заряда выходных конденсаторов. Сейчас ШИМ – контроллер работает в режиме ограничения тока – длительность выходных импульсов определяется напряжением на датчике тока, а цепь обратной связи не работает, поскольку выходное напряжение еще не достигло нормы. Напряжение на обмотке питания также низко, и контроллер питается от энергии запасенной в конденсаторе C3. Соответственно, энергии в нем должно хватить на все время переходного процесса, и оно должно быть тем больше, чем больше емкость на выходе блока. Соответственно, если использовать обычный алюминиевый конденсатор 100мкФ *25В, то можно быть уверенным, что наш блок будет устойчиво запускаться при суммарной выходной емкости до 4700мкФ.
… К сожалению, на практике эта логика отработки короткого замыкания может давать сбои. Проблема связана с трансформированием колебаний от индуктивности рассеяния первичной обмотки на обмотку питания – при перегрузке эти выбросы заряжают С3 и не дают контроллеру выключаться. Поэтому для минимизации их влияния вводят интегрирующие элементы в цепь питающей обмотки, в нашем случае это резистор R4. Иногда ставят дополнительный RC фильтр с постоянной времени большей чем постоянная времени цепи индуктивность рассеяния – паразитная емкость трансформатора. Вместо резистора можно также использовать или активный фильтр, или, лучше, небольшую индуктивность.
Проблема выбора резистора R4 достаточно сложна – с одной стороны он должен быть достаточно большим для эффективного интегрирования паразитных выбросов, а с другой стороны – не создавать слишком большого падения напряжения в режимах, близких к холостому ходу. Обычно его номинал составляет (10..47)Ом. Особенно сложно решить эту дилемму при низком собственном потреблении ШИМ – контроллера: если на стандартных микросхемах UC384(2-5) в большинстве случаев можно обойтись одним резистором, то на микропотребляющих клонах серии типа UCC3813 приходится использовать уже индуктивность (но она получается достаточно миниатюрной – ток через нее ничтожен, а индуктивность невелика, как правило (10..47)мкГн).
То есть интегрирующую цепь следует подбирать таким образом, что бы блок устойчиво работал при минимально возможной нагрузке, и стабильно уходил в перезапуск при коротком замыкании – и обязательно во всем диапазоне питающих напряжений.
Цепь подавления выброса от индуктивности рассеяния (D2, R3, C2).
Напряжение на демпфере в нашем случае желательно иметь не более 220V, тогда при максимальном входном напряжении 264VAC (372VDC) напряжение на стоке силового ключа будет близко к максимально допустимому. Конденсатор С2 должен иметь достаточно большую емкость что бы пульсации на нем были невелики, но и выше определенного предела выбирать этот конденсатор нет никакого смысла – увеличиваются габариты и цена. В нашем случае вполне разумным будет выбрать С2 как керамический конденсатор размера 1206 0.01мкФ*500В. Логично использовать три последовательно соединенных резистора размера 1206, поскольку помимо рассеивания мощности напряжение велико Vcl для одиночного резистора 1206. Будем использовать три последовательно соединенных резистора 1206 27К 5%.
Когда используем «медленный» диод в демпфере, надо уделять особое внимание режимам с малым током нагрузки, когда из-за слишком малого времени передачи энергии в нагрузку конденсатор C2 будет перезаряжаться током намагничивания, вызывая сильный нагрев силового ключа и трансформатора. Поэтому никогда не используйте в демпфере диодов с ненормированным временем восстановления, например дешевых и распространенных 1N4007! Даже если покажется, что он ведет себя адекватно, можно легко заработать головную боль при определенном сочетании входного напряжения и тока нагрузки.
Выходной диод (D4).
Для низких выходных напряжений рационально использовать диоды Шоттки, как обладающие низким прямым падением напряжения и отличными частотными свойствами. При более высоких выходах, начиная примерно от 24V, используют сверхбыстрые диоды – широко распространенные диоды Шоттки выпускаются на напряжение только до 100V. Обратим внимание, что рассеиваемая на выходном диоде уже весьма значительна, и надо уделять особое внимание вопросу отвода тепла от диода. При закрывании диода и резком нарастании напряжения на нем возникает высокочастотный дребезг на колебательном контуре, образованном индуктивностью рассеяния трансформатора, паразитной емкостью трансформатора, и собственной паразитной емкостью выходного диода. Поэтому иногда параллельно D4 ставят демпфирующую R C цепочку.
Конденсатор фильтра (С8).
Конденсатор фильтра должен обладать двумя свойствами. Во-первых, его емкость должна быть достаточно велика, чтобы мы могли получить стабильную петлю обратной связи. Если резко снизить выходной ток от номинального значения до нуля, то ШИМ – контроллеру потребуется, как правило, 10 – 20 тактов частоты преобразования для снижения коэффициента заполнения. Чем больше емкость выходного конденсатора, тем меньше будет амплитуда выброса при резком сбросе/набросе нагрузки (но больше его длительность), и тем легче будет получить стабильную петлю обратной связи. Кроме того, большая емкость снизит амплитуду выходных пульсаций, но затруднит старт блока и заставит увеличивать емкость на питании ШИМ – контроллера. Значимость каждого из этих факторов придется оценивать в каждом конкретном случае. Во-вторых, выходной конденсатор должен обладать достаточно малым эквивалентным последовательным сопротивлением (ESR) для безболезненного пропускания большого импульсного тока.
Дополнительный фильтр (L1, C9).
Как правило, пульсации на конденсаторе фильтра слишком велики для потребителя, и приходится их дополнительно сглаживать. Для низковольтных применений используется дополнительный LC фильтр, а для высоковольтных с низкими токами – RC фильтр. Рассмотрим расчет LC фильтра как наиболее широко распространенного. Для минимального влияния на стабильность петли обратной связи дополнительный LC фильтр должен иметь как можно более высокую собственную резонансную частоту, во всяком случае не меньше 1/5 частоты преобразования. Кроме того, слишком большая индуктивность приведет к увеличению размеров дросселя и увеличению потерь в его обмотке от протекания выходного тока.
Усилитель ошибки и его цепи (U3, R14, R15).
В качестве усилителя ошибки в подавляющем большинстве SMPS используется интегральная микросхема TL431 и ее клоны (микропотребляющие, низковольтовые и пр.). Логика работы данной микросхемы крайне проста. Пока напряжение на управляющем электроде не превышает опорного напряжения (для основной серии V = 2.5V), ток через микросхему не течет. По достижении опорного Ref.напряжения TL431 начинает пропускать через себя ток с очень высоким коэффициентом усиления. Соответственно, делитель на резисторах R14, R15 настраивается таким образом, чтобы при номинальном выходном напряжении напряжение на управляющем электроде в точности соответствовало опорному.
Оптрон гальванической развязки и его цепи (U3, R16, R7, R12).
Сначала рассмотрим часть схемы на первичной стороне. Ток через оптотранзистор будет максимальным в случае, когда напряжение на выходе усилителя ошибки ШИМ – контроллера (вывод 1) будет равно нулю. Этот ток будет равен напряжению на инвертирующем входе усилителя ошибки (вывод 2, в нашем случае 2.5V) поделенное на сопротивление параллельно соединенных R5 и R7. Сопротивления резисторов R5 и R7 рекомендуется выбирать равными – в этом случае мы сможем контролировать напряжение на выходе усилителя ошибки вплоть до 5V, то есть с приличным запасом. Эти резисторы не должны быть слишком большими для сохранения устойчивости схемы к помехам, но слишком малая их величина может создать излишнюю нагрузку на ШИМ – контроллер. Максимальный ток через оптрон в (0.5..1)mA можно считать удачным компромиссом в случае использования UC3844A. Остановимся на токе 0.5mA – это определит номиналы R5 и R7: R5 = R7 = 10K. Минимальный ток через оптотранзистор теоретически может быть равным нулю – если напряжение на выходе усилителя ошибки достигнет 5V. Но в установившемся режиме этого не происходит – максимальное напряжение оказывается равным немногим более 3V (определяется максимальным сигналом на токовом входе через коэффициент Gain).
Элементы коррекции петли обратной связи (C4, C10, R14).
Собственно, корректирующими элементами являются только C10 и R14, а конденсатор С4 служит для повышения устойчивости ШИМ – контроллера к помехам.
Номинал конденсатора C4 невелик – всего сотни пикофарад, обычно от 100pF до 470pF — это исключает его влияние на частотную характеристику петли обратной связи.
Для обратноходовой топологии, работающей в токовом режиме, всего два корректирующих элемента, и проще их подобрать анализируя реакцию блока на возмущающее воздействие – например, на резко изменяющуюся нагрузку. Как показывает практика, такой подход вполне себя оправдывает – в конце концов отработка возмущающих воздействий – прямая обязанность петли обратной связи. Последующая проверка на специальном оборудовании для непосредственного измерения АЧХ/ФЧХ показывает, что этот метод дает результат, очень близкий к оптимальному.
Конденсатор подавления помех С11.
С точки зрения работоспособности самого блока питания выбор емкости помехоподавляющего конденсатора чрезвычайно прост – чем больше, тем лучше. Поэтому на первый план выходят другие ограничения. В случае сетевого источника питания этим ограничением являются требования стандартов электробезопасности. В этом случае в качестве C11 стандартами разрешается использовать исключительно сертифицированные конденсаторы (так называемый «Class Y1»). Максимальная их емкость – 4.7nF, что соответствует максимально допустимому току утечки из сети к потребителю. С другой стороны, разработчику источника питания хочется иметь минимально возможный импеданс для цепи возврата паразитного тока через межобмоточную емкость трансформатора. Поэтому для мощностей выше пары десятков ватт стараются использовать конденсатор С11 емкостью 4.7nF. В любом случае конденсатор C11 должен подключаться как можно ближе к трансформатору, и проводниками с минимальной индуктивностью. Ведь его емкость плюс паразитная емкость трансформатора вместе с индуктивностью проводников образует чрезвычайно высокодобротный, легко генерирующий высокочастотные колебания при прохождении паразитного импульсного тока. Поэтому лучше всего помехоподавляющий конденсатор подсоединять на максимально развитые полигоны, подсоединенные к датчику тока первичной стороны, и к «земляному» концу трансформатора на вторичной стороне.
Нашел в интернете схему дифференциального усилителя, добавил резистор R8, и схема заработала идеально. Коэффициент усиления также 5, только теперь другая крайность, усилитель чисто дифференциальный, и при равенстве входных напряжений на выходе 0. А при разности сигналов, допустим, в 0,05В, на выходе ОУ 250мВ. Только не пойму, почему первая схема дает 1В на выходе при равенстве входных напряжений и величине входных напряжений 1В, а вторая не дает 1В на выходе, хотя отличие всего-лишь в одном резисторе и то как делителя.
В первой схеме, при изменении V8 Ку=1+R6/R5, что составит +5, а при изменении V9 Ку=-R6/R5, что составит -4. Вот поэтому Вы и «теряете» 50 мВ.
Простой дифф усилитель с дополнительным резистором R8 имеет при изменении V8 Ку=1/(1+R7/R8)*(1+R6/R5), что составит +5, а при изменении V9 Ку=-R6/R5, что составит -5. Поэтому при равенстве V8=V9 выход и будет 0, а разница входов в 50 мВ даст разницу на выходе 250 мВ, как и должно получиться.
У простого дифф усилителя по Вашей схеме Rвх- будет 10 кОм, а Rвх+ целых 60 кОм. Если у Вас источники сигналов с низким выходным сопротивлением, вроде идеальных батарей V8, V9, то результат будет точным. Если какие-то реальные источники с выходным сопротивлением, например, 1 кОм, точность упадет.
Вам какой результат-то нужен? Чтобы при V8=1 и V9=1 на выходе было 1? Или 0?
P.S. И еще, использование первой схемы в цепи ООС любого другого устройства даст Вам разные характеристики управления, как частотные, так и по глубине, для уставки и для петли ООС. Про это не нужно забывать.
Добавка:
Сейчас есть хорошие разностные (difference) усилители, вроде AD628 и инструментальные вроде AD8227. Уставку заводят на REF. Если посмотрите, как они устроены, то многое станет понятнее.
Что такое ШИМ (широтно-импульсная модуляция)
При широтно-импульсной модуляции исходного сигнала неизменными остаются амплитуда, частота и фаза исходного сигнала. Изменению под действием информационного сигнала подвергается длительность (ширина) прямоугольного импульса. В англоязычной технической литературе обозначается аббревиатурой PWM – pulse-width modulation.
Частота ШИМ определяет период импульса — T (см картинку выше). Требования к этой частоте диктуются несколькими факторами, в зависимости от типа управляемого устройства.
В случае управления светодиодами одним из главных факторов становится видимость мерцания. Чем выше частота, тем менее заметно мерцание излучаемого света. Высокая частота также помогает снизить влияние температурных скачков, которые светодиоды не любят. На практике для светодиодов достаточно иметь частоту ШИМ в пределах 100-300 Гц.
С моторами постоянного тока дела обстоят немного иначе. С одной стороны, чем больше частота, тем более плавно и менее шумно работает мотор. С другой — на высоких частотах падает крутящий момент. Нужен баланс. Более подробно о моторах мы поговорим в одной из будущих статей, а пока рекомендуем для большинства DIY задач использовать частоту ШИМ 2кГц.
Плюс, общая проблема для всех случаев управления силовой нагрузкой — потери в цепях силовой коммутации (в транзисторах, и не только), которые увеличиваются с ростом частоты ШИМ. Чем больше частота, тем большее время транзисторы находятся в переходных состояниях, активно выделяя тепло и снижая эффективность системы.
Ещё один важный параметр — разрешение ШИМ сигнала. Этот параметр показывает, с какой точностью мы можем менять коэффициент заполнения. Чем больше разрешение, тем плавнее будет меняться мощность на управляемом устройстве.
Например, у платы Ардуино с базовыми настройками, разрешение ШИМ — 256. То есть мы можем изменять сигнал от 0 до 255 — не густо, но для большинства DIY задач хватает.
Характеристики ШИМ
Для Широтно-модулированного сигнала характеристик всего две:
- Частота следования импульсов
- Скважность импульсов, или коэффициент заполнения. По сути это одно и то же. Разница лишь в обозначении: для скважности -это D, для заполнения используем литеру S. Коэффициент заполнения = единица / период сигнала T
S=1/T
T – Период сигнала
T=1/f
D=T/1=1/S
F – Частота сигнала
Таким образом, коэффициент заполнения ничто иное как интервал от периода сигнала. Отсюда следует что он (коэффициент заполнения) всегда будет меньше единицы, что не скажешь о скважности – она всегда будет больше 1.
Возьмем пример:
Частота сигнала = 50 кГц.
Период сигнала = 20 мкс.
Теперь предположим, что ключ выхода ШИМ открывается на 4 мкс. Коэффициент заполнение составит минус 20%, а скважность будет равна 5.
Конечно же, в расчет необходимо брать конструкцию ШИМ, исходя из количества силовых ключей.
Формирование ШИМ-сигналов
Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией.
Стандартная схема контроллера ШИМ предполагает наличие следующих выходов:
- Общий вывод (GND). Он реализуется в виде ножки, которая подключается к общему проводу схемы питания устройства.
- Вывод питания (VC). Отвечает за электропитание схемы. Важно не спутать его с соседом с похожим названием – выводом VCC.
- Вывод контроля питания (VCC). Как правило, чип контроллера ШИМ принимает на себя руководство силовыми транзисторами (биполярными либо полевыми). В случае если напряжение на выходе снизится, транзисторы станут открываться лишь частично, а не целиком. Стремительно нагреваясь, они в скором времени выйдут из строя, не справившись с нагрузкой. Для того чтобы исключить такую возможность, необходимо следить за показателями напряжения питания на входе микросхемы и не допускать превышения расчетной отметки. Если напряжение на данном выводе опускается ниже установленного специально для этого контроллера, управляющее устройство отключается. Как правило, данную ножку соединяют напрямую с выводом VC.
Выходное управляющее напряжение (OUT)
Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий).
Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей “затвор – исток” и “затвор – сток”. Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор.
Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Ещё о функциях контроллеров ШИМ
Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций:
- Опорное напряжение (VREF). Фабричные изделия для удобства обычно дополняются функцией выработки стабильного опорного напряжения. Специалисты заводов-изготовителей рекомендуют соединять данный вывод с общим проводом через емкость не менее 1 мкФ для повышения качества и возможности стабилизации опорного напряжения.
- Ограничение тока (ILIM). Если показатели напряжения на данном выводе существенно превышают установленное (как правило, около 1 В), то контроллер автоматически закрывает силовые ключи. В случаях, когда показатель напряжения превышает второе пороговое значение (в пределах 1,5-2 В), устройство тут же обнуляет напряжение на подключении к мягкому старту.
- Мягкий старт (SS). Показатель напряжения на данном выходе определяет максимально допустимую ширину будущих модулируемых импульсов. На данный вывод подает ток установленной величины. Если между ним и всеобщим кабелем вмонтировать дополнительную емкость, то она будет медленно, но уверенно заряжаться, что приведет к постепенному расширению каждого импульса от минимума вплоть до окончательного расчетного значения. Благодаря этому можно обеспечить плавное, а не стремительное нарастание величин тока и напряжения в общей схеме устройства, благодаря чему такая система и заслужила свое название “мягкий старт”. При этом, если специально ввести ограничение по напряжению на данном выводе, допустим, подключив делитель напряжения и систему диодов, можно и вовсе ограничить превышение импульсами некоего задаваемого значения ширины.
ШИМ контроллер: принцип работы
ШИМ сигналом управляет ШИМ контроллер. Он управляет силовым ключом благодаря изменениям управляющих импульсов. В ключевом режиме транзистор может быть полностью открытым или полностью открытым. В закрытом состоянии через p-n-переход идет ток не больше нескольких мкА, то есть мощность рассеивания близка к нулю. В открытом состоянии идет большой ток, но так как сопротивление p-n-перехода мало, происходят небольшие теплопотери. Больше тепла выделяется в при переходе из одного состояния в другое. Однако благодаря быстроте переходного процесса в сравнении с частотой модуляции, мощность этих потерь незначительна.
Все это позволило разработать высокоэффективный компактный широтно импульсный преобразователь, то есть с малыми теплопотерями. Резонансные преобразователи с переключением в 0 тока ZCS позволяют свести теплопотери к минимуму.
Аналоговая ШИМ
В аналоговых ШИМ-генераторах управляющий сигнал формируется при помощи аналогового компаратора, когда на его инвертирующий вход подается пилообразный или треугольный сигнал, а на неинвертирующий — непрерывный модулирующий.
Выходные импульсы идут прямоугольной формы. Частота их следования соответствует частоте пилы, а длительность плюсовой части импульса зависит от времени, когда уровень постоянного модулирующего сигнала, идущего на неинвертирующий вход компаратора, выше уровня пилообразного сигнала, подающегося на инвертирующий вход. В период когда напряжение пилообразного сигнала будет превышать модулирующий сигнал — на выходе будет фиксироваться отрицательная часть импульса.
Во время когда пилообразный сигнал подается на неинвертирующий вход, а модулирующий — на инвертирующий, выходные прямоугольные импульсы будут положительными, когда напряжение пилы будет выше уровня модулирующего сигнала на инвертирующем входе, а отрицательное — когда напряжение пилы станет ниже сигнала модулирующего.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
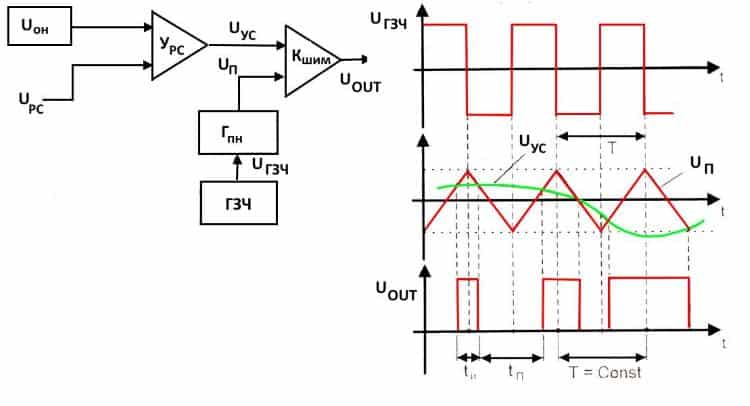
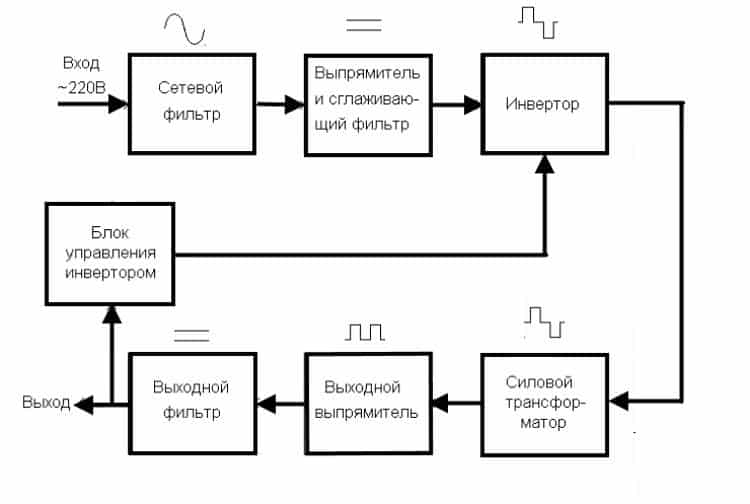
Микросхема ШИМ с силовым ключом в одном корпусе
Подобные ШИМ-контроллеры используются как в импульсных блоках питания на базе импульсного трансформатора, так и в DC-DC понижающих или повышающих преобразователях.
Можно привести в пример одну из самых распространенных микросхем в этом сегменте – LM2596. На её базе можно найти большое количество схем преобразователей, в том числе и изображенная ниже.

LM2596 включает в себя все технические решения, описанные выше, плюс в неё еще интегрирован силовой ключ на ток до 3 Ампер.
Структура микросхемы LM2596
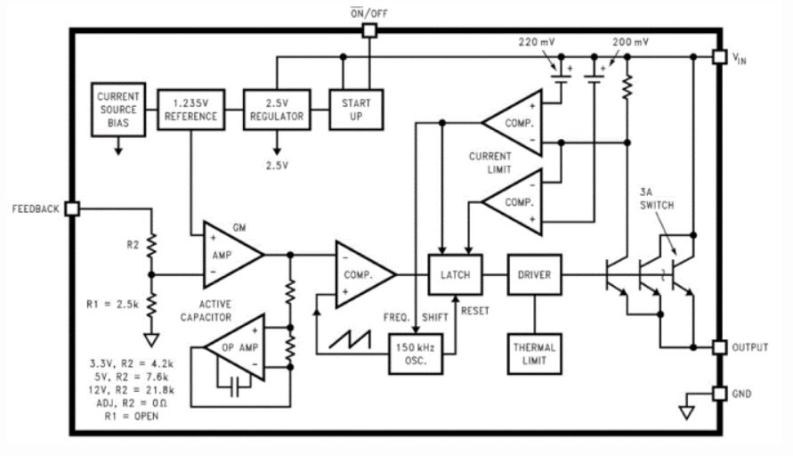
Как можно увидеть больших отличий от микросхем, которые мы рассматривали ранее в ней нет.
Еще один пример блока питания для светодиодных лент на ШИМ-контроллере 5L0380R – У неё всего 4 вывода. Как можно заметить в схеме отсутствует силовой ключ. Естественно он в микросхеме, а сама микросхема выполнена в корпусе транзистора и крепится на радиатор.
Изучая ШИМ-контроллеры можно сделать несколько выводов: Если мы имеем дело с мощным источником питания и нам необходима достаточная гибкость использования этого контроллера, то такая микросхема как TL494 (и подобные) подходит для таких задач лучше. А если блок питания средней и невысокой мощности, то вполне свою роль выполнят ШИМ-контроллеры с интегрированными в них силовыми ключами. В таких бп нет больших требований к пульсациям и помехам, а выходные цепи можно сгладить фильтрами. Обычно это блоки питания для бытовой техники, светодиодных лент, ноутбуков, зарядных адаптеров.
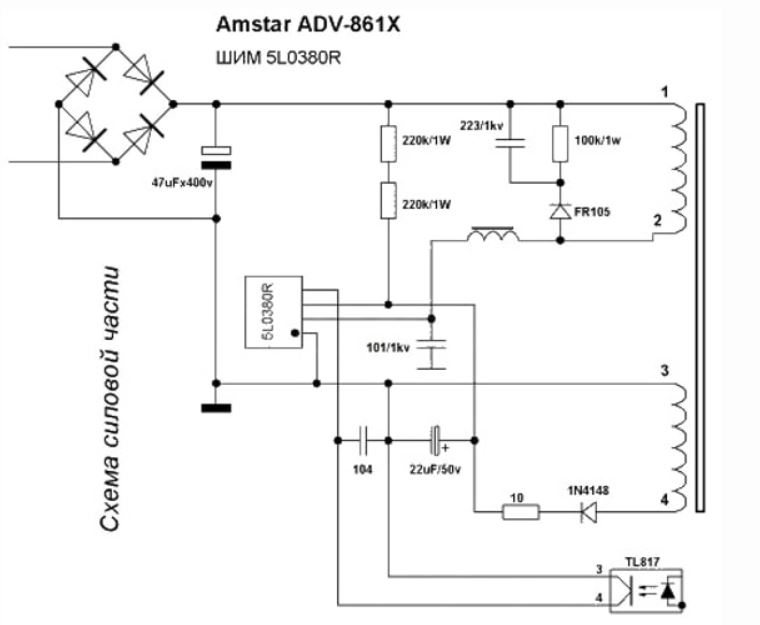
Как проверить ШИМ-контроллер
Есть несколько способов как сделать проверку ШИМ-контроллера. Можно, конечно это сделать без мультиметра, но зачем так мучаться, если можно воспользоваться нормальным прибором.
Прежде, чем проверять работу ШИМ-контроллера, необходимо выполнить базовую диагностику самого блока питания. Она выполняется так:
Шаг 1. Внимательно осмотреть в выключенном состоянии сам источник питания, в котором установлен PWM. В частности надо тщательно осмотреть электролитические конденсаторы на предмет вздутости.
Шаг 2. Провести проверку предохранителя и элементов входного фильтра блока питания на исправность.
Шаг 3. Провести проверку на короткое замыкание или обрыв диодов выпрямительного моста. Прозвонить их можно не выпаивая из платы. При этом надо быть уверенным, что проверяемая цепь не шунтируется обмотками трансформатора или резистором. Если есть на это подозрение, то всё таки придётся выпаивать элементы и проверять уже по отдельности.
Шаг 4. Провести проверку исправностм выходных цепей, а именно электролитических конденсаторов низкочастотных фильтров, выпрямительных диодов, диодных сборок и т.п.
Шаг 5. Провести проверку силовых транзисторов высокочастотного преобразователя и транзисторов каскада управления. При этом в обязательном порядке проверьте возвратные диоды, которые включенны параллельно электродам коллектор-эмиттер силовых транзисторов.
Проверка ШИМ-контроллера — видео инструкции:
Расположение и назначение выводов микросхемы.
Вывод 1
Это не инвертирующий (положительный) вход усилителя ошибки 1.
Если входное напряжение на нём будет ниже, чем напряжение на выводе 2, то на выходе этого усилителя ошибки 1, напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если на этом выводе напряжение будет выше, чем на выводе 2, то на выходе этого усилителя 1, появится напряжение (выход усилителя 1, будет иметь высокий уровень) и ширина (скважность) выходных импульсов будет уменьшаться тем больше, чем выше выходное напряжение этого усилителя (максимум 3,3 вольта).
Вывод 2
Это инвертирующий (отрицательный) вход усилителя сигнала ошибки 1.
Если входное напряжение на этом выводе выше, чем на выводе 1, на выходе усилителя ошибки напряжения не будет (выход будет иметь низкий уровень) и он не будет оказывать никакого влияния на ширину (скважность) выходных импульсов.
Если же напряжение на этом выводе ниже, чем на выводе 1, выход усилителя будет иметь высокий уровень.
Усилитель ошибки, это обычный ОУ с коэффициентом усиления порядка = 70..95дБ по постоянному напряжению, (Ку = 1 на частоте 350 кГц). Диапазон входных напряжений ОУ простирается от -0.3В и до напряжения питания, минус 2В. То есть максимальное входное напряжение должно быть ниже напряжения питания минимум на два вольта.
Вывод 3
Это выходы усилителей ошибки 1 и 2, соединённых с этим выводом через диоды (схема ИЛИ). Если напряжение на выходе какого-либо усилителя меняется с низкого на высокий уровень, то на выводе 3 оно также переходит в высокий.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе микросхемы пропадают (нулевая скважность).
Если напряжение на этом выводе близко к 0 В, тогда длительность выходных импульсов (скважность) будет максимальна.
Вывод 3 обычно используется для обеспечения ОС усилителей, но если это необходимо, то вывод 3 может быть использован и в качестве входного, для обеспечения изменения ширины импульсов.
Если напряжение на нем высокое (> ~ 3,5 В), то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Вывод 4
Он управляет диапазоном изменения “мёртвого” времени (англ. Dead-Time Control), в принципе это та же самая скважность.
Если напряжение на нем будет близко к 0 В, то на выходе микросхемы будут, как минимально возможные, так и максимальные по ширине импульсы, что соответственно может задаваться другими входными сигналами (усилители ошибок, вывод 3).
Если напряжение на этом выводе будет около 1,5 В, то ширина выходных импульсов будет в районе 50% от их максимальной ширины.
Если напряжение на этом выводе превысит 3,3 В, то импульсы на выходе МС будут отсутствовать. Блок питания не запустится ни при каких обстоятельствах.
Но стоит не забывать, что при увеличении “мёртвого” времени, диапазон регулировки ШИМ будет уменьшаться.
Изменяя напряжение на выводе 4, можно задавать фиксированную ширину “мёртвого” времени (R-R делителем), осуществить в БП режим мягкого старта (R-C цепочкой), обеспечить дистанционное выключение МС (ключ), а также можно использовать этот вывод, как линейный управляющий вход.
Давайте рассмотрим (для тех, кто не знает), что такое “мёртвое” время и для чего оно нужно.
При работе двухтактной схемы БП, импульсы поочерёдно подаются с выходов микросхемы на базы (затворы) выходных транзисторов. Так как любой транзистор – элемент инерционный, он не может мгновенно закрыться (открыться) при снятии (подаче) сигнала с базы (затвора) выходного транзистора. И если на выходные транзисторы подавать импульсы без “мёртвого” времени (то есть с одного импульс снять и на второй сразу подать), может наступить такой момент, когда один транзистор не успеет закрыться, а второй уже открылся. Тогда весь ток (называется сквозной ток) потечёт через оба открытых транзистора минуя нагрузку (обмотку трансформатора), и так как он ни чем не будет ограничен, выходные транзисторы мгновенно выйдут из строя.
Чтобы такое не произошло, необходимо после окончания одного импульса и до начала следующего – прошло какое-то определённое время, достаточное для надёжного закрытия того выходного транзистора, со входа которого снят управляющий сигнал.
Это время и называется “мёртвым” временем.
Да, ещё если посмотреть рисунок с составом микросхемы, то мы видим, что вывод 4 соединён со входом компаратора регулировки мертвым временем (DA1) через источник напряжения, величиной 0,1-0,12 В. Для чего это сделано?
Это как раз и сделано для того, чтобы максимальная ширина (скважность) выходных импульсов никогда не была равна 100%, для обеспечения безопасной работы выходных (выходного) транзисторов.
То есть если “посадить” вывод 4 на общий провод, то на входе компаратора DA1 всё равно не будет нулевого напряжения, а будет напряжение как раз этой величины (0,1-0,12 В) и импульсы с генератора пилообразного напряжения (ГПН) появятся на выходе микросхемы только тогда, когда их амплитуда на выводе 5, превысит это напряжение. То есть микросхема имеет фиксированный максимальный порог скважности выходных импульсов, который не превысит для однотактного режима работы выходного каскада 95-96%, и для двухтактного режима работы выходного каскада – 47,5-48%.
Вывод 5
Это вывод ГПН, он предназначен для подключения к нему времязадающего конденсатора Ct, второй конец которого подсоединяется к общему проводу. Ёмкость его выбирается обычно от 0,01 мкФ до 0,1 мкФ, в зависимости от выходной частоты ГПН импульсов ШИМ-контроллера. Как правило здесь используются конденсаторы высокого качества.
Выходную частоту ГПН можно как раз контролировать на этом выводе. Размах выходного напряжения генератора (амплитуда выходных импульсов) где-то в районе 3-х вольт.
Вывод 6
Тоже вывод ГПН, предназначенный для подключения к нему врямя-задающего резистора Rt, второй конец которого подсоединяется к общему проводу.
Величины Rt и Ct определяют выходную частоту ГПН, и рассчитываются по формуле для однотактного режима работы;
Для двухтактного режима работы формула имеет следующий вид;
Для ШИМ-контроллеров других фирм, частота рассчитывается по такой же формуле, за исключением – цифру 1 необходимо будет поменять на 1,1.
Вывод 7
Он присоединяется к общему проводу схемы устройства на ШИМ-контроллере.
Вывод 8
В составе микросхемы имеется выходной каскад с двумя выходными транзисторами, которые являются ее выходными ключами. Выводы коллекторов и эмиттеров этих транзисторов свободные, и поэтому в зависимости от необходимости, эти транзисторы можно включать в схему для работы как с общим эмиттером, так и с общим коллектором.
В зависимости от напряжения на выводе 13, этот выходной каскад может работать как в двухтактном режиме работы, так и в однотактном. В однотактном режиме работы эти транзисторы можно соединять параллельно для увеличения тока нагрузки, что обычно и делают.
Так вот, вывод 8, это вывод коллектора транзистора 1.
Вывод 9
Это вывод эмиттера транзистора 1.
Вывод 10
Это вывод эмиттера транзистора 2.
Вывод 11
Это коллектор транзистора 2.
Вывод 12
К этому выводу подсоединяется «плюс» источника питания TL494CN.
Вывод 13
Это вывод выбора режима работы выходного каскада. Если этот вывод подсоединить к общему проводу, выходной каскад будет работать в однотактном режиме. Выходные сигналы на выводах транзисторных ключей будут одинаковыми.
Если подать на этот вывод напряжение +5 В (соединить между собой выводы 13 и 14), то выходные ключи будут работать в двухтактном режиме. Выходные сигналы на выводах транзисторных ключей будут противофазны и частота выходных импульсов будет в два раза меньше.
Вывод 14
Это выход стабильного Источника Опорного Напряжения (ИОН), С выходным напряжением +5 В и выходным током до 10 мА, которое может быть использовано в качестве образцового для сравнения в усилителях ошибки, и в других целях.
Вывод 15
Он работает точно так же, как и вывод 2. Если второй усилитель ошибки не используется, то вывод 15 просто подключают к 14-му выводу (опорное напряжение +5 В).
Вывод 16
Он работает так же, как и вывод 1. Если второй усилитель ошибки не используется, то его обычно подключают к общему проводу (вывод 7).
С выводом 15, подключенным к +5 В и выводом 16, подключенным к общему проводу, выходное напряжение второго усилителя отсутствует, поэтому он не оказывает никакого влияния на работу микросхемы.
Отличительные особенности импульсных и линейных БП.
Существенным преимуществом импульсных источников питания перед линейными является хороший КПД (около 90%)
Структура ШИМ
Давайте рассмотрим структуру любого ШИМ-контроллера. Хоть в своем огромном семействе разные ШИМ-ы и обладают дополнительными функциональными особенностями, но все же они все похожи.
Заглянув в микросхему, мы увидим полупроводниковый кристалл, в котором находятся следующие функциональные составляющие:
- Генератор последовательных импульсов.
- Источник опорного напряжения.
- Схема обратной связи (ОС), усилитель ошибки.
- Генератор прямоугольных импульсов, управляющий транзисторами, которые в свою очередь коммутируют силовые ключевые каскады.
Количество этих ключей, зависит от предназначения самого ШИМ-контроллера. Например, простые обратноходовые схемы построены на 1-м силовом ключе, полу мостовые на 2-х, а мостовые преобразователи на 4-х ключах.
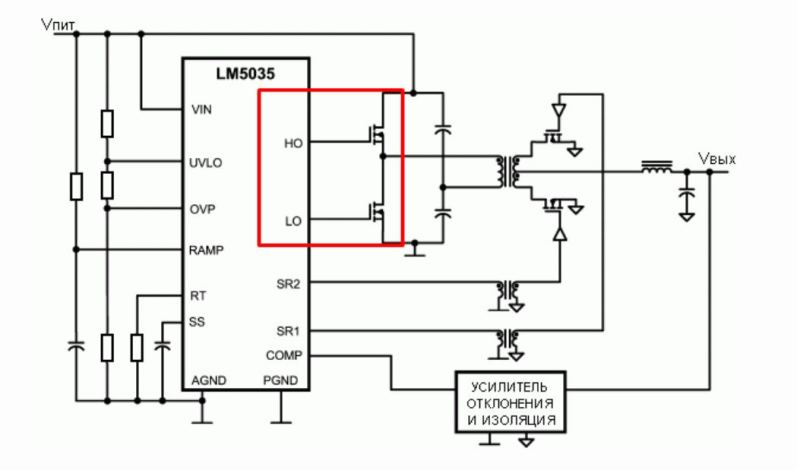
Выбирая ШИМ-контроллер необходимо исходит из того какой ключ используется. Например, если в блоке питания в качестве выходного каскада стоит биполярный транзистор, то подойдет большая часть контроллеров. Связано это с тем, что управлять таким силовым ключом достаточно просто – подавая импульсы на базу транзистора, мы открываем и закрываем его.
А вот если мы будем использовать полевые транзисторы с изолированным затвором (MOSFET) или IGBT транзисторы, то здесь уже немного сложнее. Выходной транзистор-ключ мало того что нужно открыть – путем заряда затвора, так нам его еще надо и закрыть, естественно разряжая затвор ключа. Для таких схем используются соответствующие ШИМ-контроллеры. У них на выходе стоит 2 транзистора – один заряжает затвор ключа, а другой разряжает, замыкая его на землю.
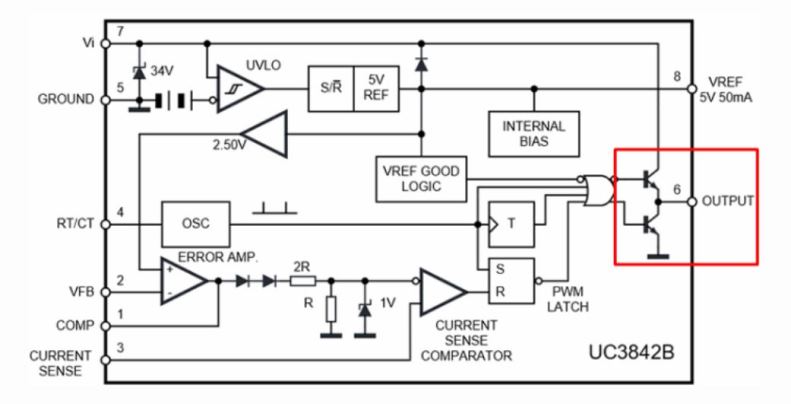
Arduino и ШИМ
В уроке про функции времени я рассказывал, что у микроконтроллера есть так называемые счётчики, которые считают “пинки” от тактового генератора (кварца). Данные счётчики как раз и генерируют ШИМ сигнал, т.е. само вычислительное ядро микроконтроллера в этом не участвует. Помимо расчётов, даже вывод сигнала с ноги МК ложится на плечи счётчика. Это очень важно понимать, потому что ШИМ сигнал не тормозит выполнение кода, так как его генерацией занимается буквально “другая железка”.
На платах UNO/Nano/Pro Mini у нас есть три таймера-счётчика, у каждого таймера есть по два выхода на пины МК, то есть у нас есть 2*3=6 пинов, способных генерировать ШИМ сигнал. Для генерации ШИМ у нас есть готовая функция analogWrite(pin, duty)
- pin – пин, являющийся выводом таймера. Для Нано/Уно это пины D3, D5, D6, D9, D10, D11. На некоторых платах они помечены * звёздочкой, а вообще для определения ШИМ пинов на любой другой модели Ардуино достаточно загуглить распиновку
- duty – заполнение ШИМ сигнала. По умолчанию все “выходы” ШИМ у нас 8-битные, то есть duty может принимать значение с “разрешением” 8 бит, а это 0-255
Совместим эти знания с прошлым уроком и попробуем менять яркость светодиода, подключенного через резистор к пину D3. Потенциометр подключен к пину A0
void setup() { pinMode(3, OUTPUT); // D3 как выход } void loop() { // ШИМ на 3 пин, 1023/4 = 255 – перевели диапазон analogWrite(3, analogRead(0) / 4); delay(10); }
Рассмотренный пример меняет яркость светодиода в зависимости от положения рукоятки потенциометра.
Пару слов о “стандартном” ШИМ сигнале – мы получаем его с такими настройками, какие нам даёт библиотека Arduino.h, а настройки эти сильно занижены по сравнению с возможностями Arduino. Про “улучшение” ШИМ мы поговорим позже, а сейчас давайте глянем на характеристики ШИМ “из коробки”:
| Таймер | Пины | Частота | Разрешение |
| Timer 0 | D5 и D6 | 976 Гц | 8 бит (0-255) |
| Timer 1 | D9 и D10 | 488 Гц | 8 бит (0-255) |
| Timer 2 | D3 и D11 | 488 Гц | 8 бит (0-255) |
Это весьма плачевные цифры, особенно по частоте. Все таймеры приведены под одну гребёнку, чтобы пользователь не думал не гадал и лишнюю документацию не изучал. К изменению частоты и разрядности ШИМ мы вернёмся в отдельном уроке, а пока что можете посмотреть данный урок в видео варианте.
ШИМ и микроконтроллеры
Простейший генератор ШИМ можно собрать и без всяких микроконтроллеров, только лишь с микросхемой таймера 555. Разумеется, любой микроконтроллер тоже умеет работать с ШИМ сигналом.
Например, у платы Ардуино имеется 6 контактов: 3, 5, 6, 9, 10 и 11, которые можно настроить для генерации аппаратного ШИМ. По-умолчанию, на контактах 5 и 6 частота сигнала будет 1кГц, на остальных — скромные 500Гц. Как ими пользоваться ШИМ на Ардуино подробно рассказывается на уроке «Ардуино: ШИМ» (скоро будет).
STM32F103 — гораздо более серьёзный микроконтроллер. У него целых 20 контактов имеют возможность генерации ШИМ. Частота этого микроконтроллера — 72МГц, что делает возможным плавное и точное управление моторами постоянного тока, не говоря уже о светодиодах. Узнаём подробности в уроке про STM32 и ШИМ.
Кстати, микроконтроллеры умеют не только генерировать ШИМ, но и детектировать подобные сигналы. Про это можно почитать в соответствующей статье на нашем портале (скоро будет).
Основные проблемы ШИМ-преобразователей
При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование.
Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения.
Диагностика неисправностей
Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра.
Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру:
- Контроллер глохнет после старта – обрыв петли ОС, перепад по току, проблемы с конденсатором на выходе фильтра (если таковой имеется), драйвером; возможно, разладилось управление ШИМ-контроллером. Надо осмотреть устройство на предмет сколов и деформаций, замерить показатели нагрузки и сравнить их с типовыми.
- ШИМ-контроллер не стартует – отсутствует одно из входных напряжений или устройство неисправно. Может помочь осмотр и замер выходного напряжения, в крайнем случае, замена на заведомо рабочий аналог.
- Напряжение на выходе отличается от номинального – проблемы с петлей ООС или с контроллером.
- После старта ШИМ на БП уходит в защиту при отсутствии КЗ на ключах – некорректная работа ШИМ или драйверов.
- Нестабильная работа платы, наличие странных звуков – обрыв петли ООС или цепочки RC, деградация емкости фильтра.
Как сделать устройство управления своими руками
Изготовление устройства своими руками доступно только тем, кто имеет некоторые навыки работы с паяльником, в состоянии уверенно читать схемы и вообще имеет хотя бы общее представление об электротехнике и принципах работы электронных устройств. Подходить к вопросу без понимания его сути бессмысленно, так как малейшая ошибка поставит такого мастера в тупик.
Расчет контроллера
Этот момент довольно сложен и зачастую выполняется не столько именно путем расчетов, сколько подгонкой параметров балластного регулятора к имеющимся характеристикам ветрогенератора. Дело в том, что каждое устройство имеет собственные рабочие показатели, несоответствие которым не позволит контроллеру качественно выполнять свои функции. Например, если для устройства потребуется 12 вольт для начала зарядки, а контроллер собран на 24, то такая система попросту не сможет работать.
Для расчета контроллера надо снять все рабочие характеристики с генератора, т.е. проверить ветряк с установленным генератором на производительность в разных режимах работы — на слабых, средних и сильных ветрах. Учесть преобладающую скорость потока, при которой устройство будет работать практически все время. На основании этих данных выбирается напряжение, при котором открывается транзистор, переключающий устройство с одного режима на другой и наоборот.
Подготовительные работы
Прежде, чем приступить к сборке, надо приготовить все необходимые детали, тщательно проверить их номинал. Потребуются инструменты и материалы:
- паяльник
- припой, канифоль
- пассатижи с узкими губками
- пинцет
- соединительный провод (в идеале – двух цветов)
- печатная плата или монтажная панель
Создание печатной платы — непростой процесс, требующий наличия определенных приспособлений, химикатов и пластины фольгированного гетинакса. Проще использовать готовую монтажную панель или обычную пластину из фанеры, пластика или прочих листовых материалов. Тщательно продумать размещение всех элементов на пластине. Рекомендуется объединять их по категориям, чтобы все однотипные детали были сгруппированы в одних местах, так будет проще ориентироваться во время ремонтных работ.
Необходимо предусмотреть световую сигнализацию, свидетельствующую о текущем режиме работы устройства, чтобы при первом же взгляде было сразу видно, загрузка или отдача энергии происходит в данный момент.
Сборка устройства
При должной подготовке и наличии всех необходимых деталей процесс сборки особых проблем не вызывает. Основная задача — правильное соединение всех элементов в соответствии со схемой. При аккуратной и внимательной сборке устройство будет выполнять поставленную задачу вполне качественно, главное, чтобы все детали были исправными и соответствовали заявленным номиналам.
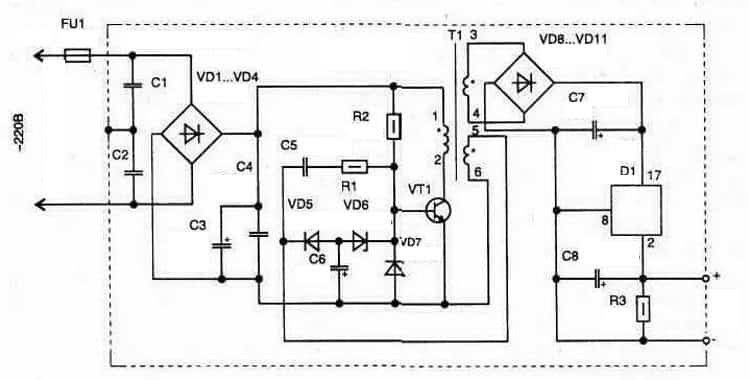
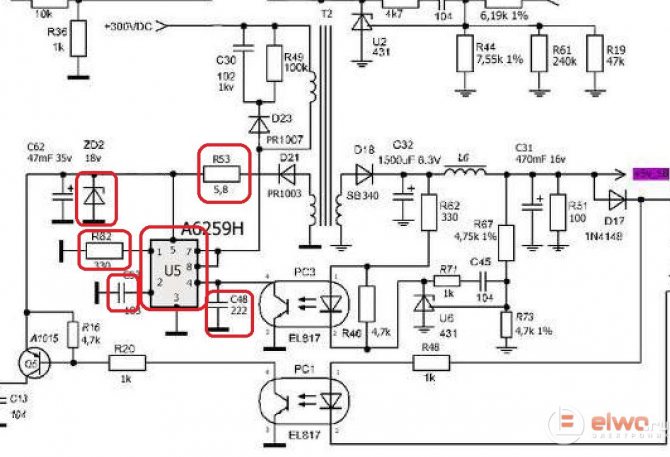
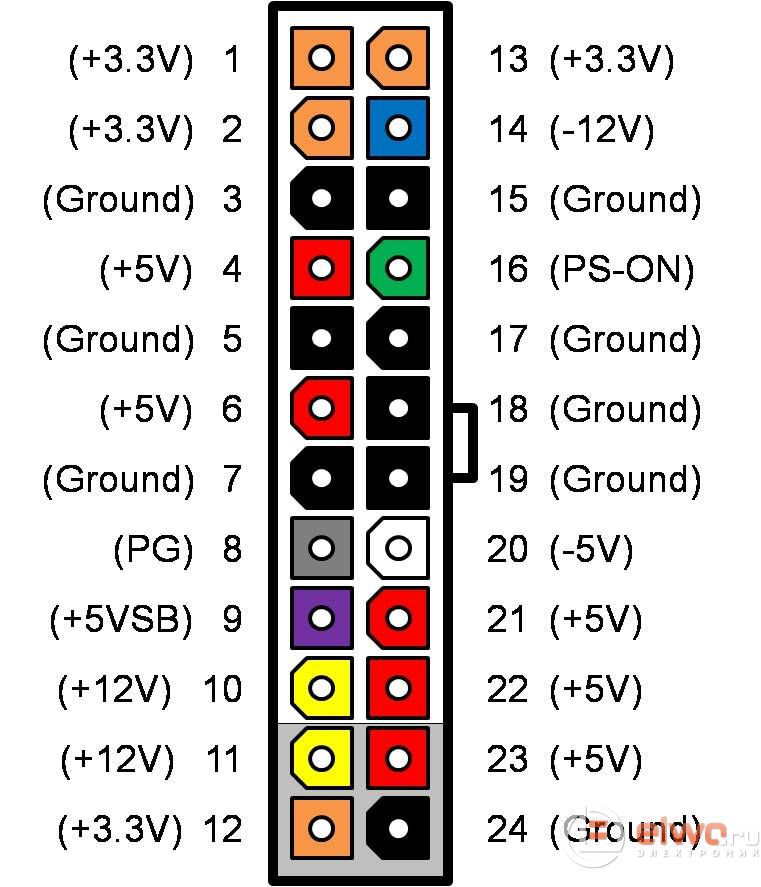
Схемные решения для сборки своими руками
За всё время с момента появления первых самодельных ветряков количество схемных решений контроллеров выросло многократно. Многие из схемных разработок далеко не совершенны, но есть и такие варианты, на которые следует обратить внимание.
Для бытового применения, конечно же, актуальными являются простые схемы, требующие небольших финансовых вложений, эффективные и надёжные.
Отталкиваясь от этих требований, начать можно с контроллера для ветрогенератора, созданного на базе реле-регуляторов автомобилей. В схеме применимы как реле с минусовым управляющим контактом, так и реле с плюсовым управляющим контактом.
Этот вариант привлекает малым количеством деталей и простейшим монтажом. Потребуется всего одно реле, один силовой транзистор (полевой), один резистор.
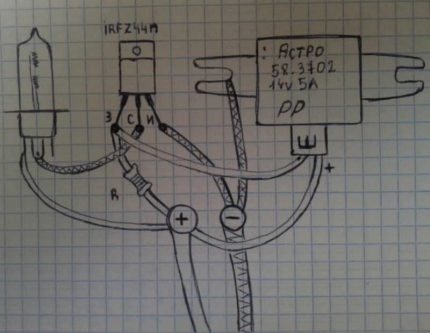
Схема контроллера, вычерченная неким электронщиком своими руками. Здесь всё просто и понятно без лишних слов. Собственно, как и в самой технологичности решения. Минимум деталей – максимум сбережений (+)
Схема носит название «балластная», так как в ней используется дополнительная нагрузка в виде обычной лампочки накаливания. Таким образом, список деталей пополнится ещё одним элементом – лампой.
Используется автомобильная лампа (или несколько ламп) на 12 вольт в зависимости от мощности системы. Также вместо этого элемента допустимо применять нагрузочное сопротивление иного типа: мощный резистор, электронагреватель, вентилятор и т.п.
Работа «балластной» схемы с минусом
Действие автомобильного реле-регулятора напрямую связано с уровнем заряда аккумуляторной батареи. Если напряжение на клеммах АКБ поднимается выше 14.2 вольт, реле срабатывает и размыкает минусовую цепь силового транзистора.
В свою очередь на транзисторе открывается переход, подключающий лампу прямого накала к аккумулятору. В итоге зарядный ток сбрасывается через нить лампы накаливания. При понижении напряжения на клеммах АКБ – обратный процесс. Так осуществляется поддержка стабильного уровня напряжения батареи.
Как действует «балластная» схема с плюсом
Слегка модернизированным вариантом «балластного» контроллера заряда для ветряка является вторая схема на реле-регуляторе с плюсовым управляющим контактом. Например, подойдут реле от автомобилей марки «ВАЗ».
Отличие от предыдущей схемы – применение твердотельного реле, например, GTH6048ZA2 на ток 60A вместо транзистора. Преимущества очевидны: схема выглядит ещё проще и при этом обладает большей надёжностью и эффективностью.
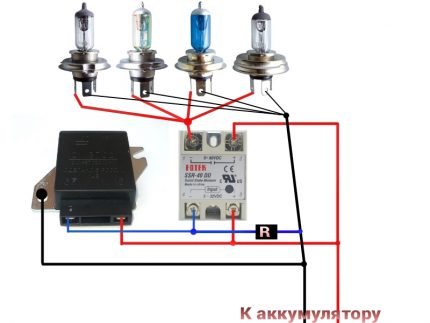
Ещё одно простейшее схемотехническое решение под сборку контроллера заряда АКБ ветрогенератора. Эффективность и надёжность схемы повышается за счёт применения в ней твердотельного реле (+)
Особенность этого простого решения – прямое подключение на клеммы аккумулятора генератора ветряка. Проводники контроллера заряда тоже «посажены» непосредственно на контакты аккумулятора.
По факту обе этих части схемы никак не связаны между собой. Напряжение с ветрогенератора подаётся на батарею постоянно. Когда напряжение на клеммах АКБ достигает значения 14.2 Вт, твердотельное реле подключает нагрузку для сброса. Так аккумулятор защищается устройством от перезаряда.
Здесь балластной нагрузкой может выступать не только лампа накаливания. Вполне реально подключить любое иное устройство, рассчитанное на ток до 60 А. Например, электрический трубчатый нагреватель.
Что ещё важно в этой схеме – действие твердотельного реле характеризуется плавно нарастающей амплитудой. По сути, налицо эффект профессионально изготовленного ШИМ-контроллера.
Усложнённый вариант схемы контроллера
Если предыдущий вариант схемного решения контроллера заряда АКБ только лишь напоминает устройство ШИМ (широтно-импульсная модуляция), здесь данный принцип реализуется конкретно.
Эта схема контроллера для ветряка с трёхфазным генератором отличается некоторыми сложностями, так как предполагает использование микросхем – в частности, операционных усилителей на полевых транзисторах в составе сборки TL084.
Однако на монтажной плате всё выглядит не так сложно, как на бумажном листе.
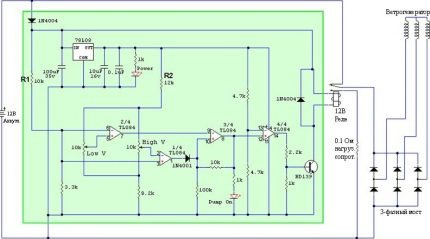
Схемное решение для сборки контроллера своими руками, где используется микросборка TL084. Принцип работы также выстроен с применением реле для переключения режимов, но есть возможность регулировать точки отсечки (+)
Так же, как и в предыдущих решениях, используется реле в качестве коммутационного элемента для балластной нагрузки. Реле рассчитано на работу с 12-вольтовым аккумулятором, но при желании можно подобрать модель на 24 Вт.
Балластный резистор сделан в виде мощного сопротивления (намотка на керамике нихром). Для регулировки рабочего диапазона напряжений (11.5-18 Вт) в схеме используются переменные резисторы, включенные в цепь управления микроэлектронной сборки TL084.
Работает такой контроллер заряда аккумулятора ветряка следующим образом. Трёхфазный ток, полученный от ветрогенератора, выпрямляется силовыми диодами.
На выходе диодного моста образуется постоянное напряжение, которое подаётся на вход схемы через контакты реле, дополнительный диод, аккумулятор и дальше на внутрисхемный стабилизатор (78L08) и на вход сборки TL084.
Момент переключения триггера в одно из состояний определяется значениями переменных резисторов (Low V и High V) нижнего и верхнего порога напряжений.
Пока на клеммах аккумуляторной батареи присутствует напряжение, не превышающее 14.2 вольта (удовлетворяющее значению настройки R High V), выполняется заряд. Как только значения изменяются в сторону увеличения, операционный усилитель TL084 подаёт сигнал на базу транзистора, которым управляется реле.
Реализованный своими руками продукт по схеме с микросборкой TL084. Всё предельно просто, даже вместо качественной печатной платы выбрана плата под навесной монтаж. Такими моментами всегда радуют самодельные конструкции
Происходит срабатывание реле, цепь питания схемы разрывается и замыкается на балластный резистор. Сброс по балласту проходит до момента разряда аккумулятора, близкого к значению настройки переменного резистора Low V.
Как только это значение достигнуто, вторым операционным усилителем TL084 схема переключается в обратное состояние. Так осуществляется работа контроллера.
В чем отличие между шим и шир
На Западе понятия широтно-импульсного регулирования ШИР и ШИМ практически не различаются. Однако у нас между ними все же существует различие. Во многих микросхемах реализован принцип ШИР, однако при этом они все равно называются ШИМ контроллеры. Таким образом различий в названии этих двух способов практически нет.
Единственное отличие между ШИР и ШИМ — при ШИР время импульса и паузы постоянны. А при ШИМ их длительности изменяются, что позволяет сформировать выходной ШИМ сигнал заданной формы.
Источники:
- https://odinelectric.ru/knowledgebase/chto-takoe-shim
- https://a-golubev.ru/tehnologii/shim-kontroller-chto-za-zver-takoj.html
- https://www.syl.ru/article/181948/new_shim-kontroller-shema-printsip-rabotyi-upravlenie
- https://ledjournal.info/spravochnik/shirotno-impulsnaya-modulyaciya.html
- https://prosvetodiod.ru/informatsiya-ob-osveshhenii/chto-takoe-shim-shirotno-impulsnaya-modulyatsiya
- https://favourite-svet.ru/elektroprovodka/kak-rabotaet-shim-kontroller.html
- https://set-os.ru/chto-takoe-shim-kontroller-pwm/
- http://vprl.ru/publ/tekhnologii/nachinajushhim/tl494_chto_ehto_za_zver_takoj/9-1-0-151
- https://alexgyver.ru/lessons/pwm-signal/
- https://robotclass.ru/tutorials/pwm/
- https://instanko.ru/elektroinstrument/shim-kontroller-chto-eto-takoe.html
- https://ToolProkat43.ru/svoimi-rukami/shim-kontroller-svoimi.html
Предыдущая
ИнформацияПечатные платы что это и их назначение?
Следующая
ИнформацияАСТУЭ — автоматизированная система технического учета энергоресурсов