
Что является причиной не запуска двигателя?
Насколько я понимаю, то потеря связи между моторным и коробкой. Бывает просто мигает F и куча ошибок о потере связи по CAN (в моторном, в коробке, даже в дисплее, на нем тоже F-ки мигают вместо расходов), а бывает еще и дроссель трещит. Кроме ошибок по связи присутствуют еще и ошибки по обрыву всех 4-х форсунок, 1600 «замените ECM» и пару штук по дросселю, коды точно сейчас не скажу, все на работе, да и маловероятно, что в этом причина. Диагностирую СканДоком. Аккум живой, судя и по плотности, и по проверке нагрузочной вилкой.
kostia111 За подсказку по EHPS спасибо ! Я с ними, честно говоря, дела никогда не имел. Т.е. если TRW на быстром CAN не сидит, значит на потерю связи по ней влиять не может ? И если нету щеток, то и искрить и давать помехи тоже не может ? Правильно понимаю ? Сегодня правда обнаружил мультиметром, что при вращении рулем проседает напряжение в бортсети с 14.2 примерно до 13. По показаниям СканДока ток в приводе EHPS ампер 35. Это нормально ? Завтра накину осциллограф, посмотрю форму в бортсети.
Буду разбираться дальше  Я б эту машину отправил бы к дилерам, но у нас один закрылся, а во втором сам работал, примерно представляю уровень оставшихся после кризиса мастеров Сегодня, например, подсказали, что однозначно где-то перетерся КАН. Или в этом есть рациональное зерно ? А девочка-хозяйка хорошая, хочется помочь
Я б эту машину отправил бы к дилерам, но у нас один закрылся, а во втором сам работал, примерно представляю уровень оставшихся после кризиса мастеров Сегодня, например, подсказали, что однозначно где-то перетерся КАН. Или в этом есть рациональное зерно ? А девочка-хозяйка хорошая, хочется помочь
Модуль заменю. Слышал, что вроде с Крузов-Авешек подходят модуля и вроде обращений по ним нету. Или все-таки только оригинал ? Цена на него правда нехилая… И можно ли по осциллограммам вторички судить об исправности модуля на 100% ? Или он может иногда работать нормально, а иногда и глючить ?
ЗЫ. Прошу прощения за такое количество вопросов и очень благодарен за Ваши ответы
Изменено 22 ноября 2010 пользователем ИльяКР
Это песец. Заехал я сегодня в сервис на диагностику. Целая куча ошибок. Самая печальная из них: P2135-00 (Неправильная корелляция напряжения датчиков положения дроссельной заслонки) Почитал истории тех, у кого была такая ошибка. Как правило, лечится заменой дроссельной заслонки. Посмотрел ради интереса цену на новую заслонку — 55563385 — 45.000р. Жесть!
Еще раз повторюсь какие симптомы этой ошибки: Проявилось около месяца назад, в движении загорелась неисправность двигателя, тяга пропала, при остановке на холостых обороты взлетели до 1500, движок колбасит. В мороз на холодную при прогреве проявляется всегда, приходится глушить, через минуту запускать двигатель и сразу ехать. Иногда вылазит в движении, это особенно неудобно, так как тяга уходит и приходится стараться, понижая передачу, дотянуть на аварийке до безопасного для остановки места. Накатал так уже около 2000км Долго думал, что виноват во всём модуль зажигания но, как оказалось, дело не в нём.
Эта ошибка вообще не стирается из памяти, она активна и висит всё время.
Помимо нее есть ещё вот такие ошибки, выдаваемые в разных разделах, таких как — рулевое управление, АБС, мотор омывателя, освещение салона, вентиляция и кондиционирование, иммобилайзер:
C0000-08 — Неисправность цепи датчика скорости автомобиля
C044A-08 — Отсутствует сигнал частоты вращения двигателя
U2100-00 — Неисправность цепи CAN-BUS
U2105-00 — Нет связи CAN-BUS с ECM (модулем управления двигателем)
Они стираются, но после запуска двигателя вылазят снова!
Эти ошибки, я так понял, не связаны с той, что по дроссельной заслонке, а скорее всего где-то просто влага или плохой контакт. Хотя х.з. Буду записываться к электрику в сервис, как денежка будет, примерно через неделю.
ДОПОЛНЕНИЕ №1 (25.02.18)
Катался сегодня в Курск (туда — назад около 180 км), вставал на трассе 4 раза. В этот раз контролировал положение дроссельной заслонки и когда происходил сбой, она замирала на 30%.
Полный размер
Вот в таком состоянии оставалась заслонка при возникновении неисправности. При воздействии на педаль газа, обороты немного возрастали, но заслонка не двигалась.
Заехал на обратном пути на авторынок, купил очиститель контактов, по приезду в гараж снял дроссель и понес домой разбирать.

Полный размер
Очиститель контактов и очиститель дроссельной заслонки
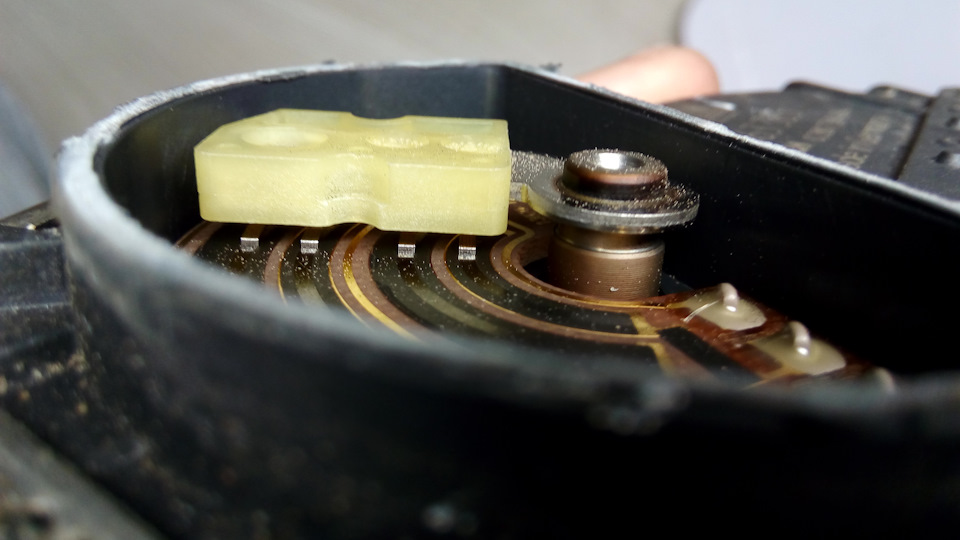
Вскрыл дроссель. Дорожки не протерты, щетки все нормально соприкасаются с дорожками. Ничего подозрительного. Почистил плату очистителем. Сделал замеры между выходами датчиков в закрытом и открытом положении заслонки. (см. иллюстрацию).
Полный размер
Дорожки не протерты. Щетки соприкасаются.

Полный размер
Вот такие сопротивления у меня получились на выходах датчиков.
После сборки и установки дросселя на место двигатель запустился хорошо, прогрелся без проблем. Прокатился около 19 км в разных режимах езды, проблема пока не вылезла. Правда это еще не показатель, так как расстояние маленькое, а ошибки считать пока нечем. Но есть и улучшение: раньше на холостых оборотах процент положения дроссельной заслонки постоянно скакал в диапазоне 14 — 16 процентов, а сейчас стабильно стоит на 14,12%.
ДОПОЛНЕНИЕ №2 (26.02.18)
Похоже, проблема с дроссельной заслонкой решена. Заслонка больше не замирает на 30% и на холостых стоит стабильно.
С ошибками по CAN шине разберусь позднее. Может создам новую запись.
P.S. (02.03.18)
Вот уже накатал 320км. и всё работает ОК. В общем, причина глюка дросселя была в том, что от износа щеток летели частички металла и они осели везде, в том числе и на контактных дорожках. Сопротивление дорожек изменилось и начались глюки. Очистиелем контактов смыл налёт и всё заработало как надо.
P.P.S. (05.03.18)
Через 500 км. опять началась проблема с дросселем.
Ошибки «Нет связи CAN-BUS»
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Походу питалово отвалилось. Звони все преды тестером. Не на вид, а именно тестером.
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
Ошибки, в точности как в соседней ветке ( http://astraclub.ru/threads/61519-Пр. -Нужна-помощь .)
000970 похоже на U0009 High Speed CAN Communication Bus (-) shorted to Bus (+)
012170 похоже на U0121 Lost Communication With Anti-Lock Brake System (ABS) Control Modul
014070 похоже на U0140 Lost Communication With Body Control Module
040272 похоже на U0402 Invalid Data Received From Transmission Control Module
041572 похоже на U0415 Invalid Data Received From Anti-Lock Brake System Control Module
0501F0 похоже на P0501 Vehicle Speed Sensor A Range/Performance
056472 похоже на P0564 Cruise Control M ulti-Function Input A Circuit
065070 похоже на P0650 Malfunction Indicator Lamp (MIL) Control Circuit Malfunction
161300 похоже на P1613 Loss of DIM Serial Data
С недавненго времени опком перестал входить в блоки. Редко когда зайдет в ЭБУ и сразу же виснет при просмотре измерительных данных. В трансмиссию заходит, видит 2103. Но неактивны все другие кнопки (измерительные).
Источник
Тема: Проблемы с кан — шиной

Проблемы с кан — шиной
Всем привет )
Новый подарок от жопиля. Заглючила кан-шина!
По диагностике опкомом периодически всплывают ошибки по кан-шине и по разным блокам. Постоянства нет.
С года полтора назад, когда перецеплял гамнитолу, в разъеме штатной аудио системы кан шина имела напругу в 2.5 В. Теперь 0,18, только мерил в обд разъеме.
Сопротивление около 60-65 Ом. Мерил профи прибором, взятом у коллег, т.к. китайский сопротивление показывать особо не хотел (значение не устаканивалось)
В нескольких темах почитал про «укус куницы», раздербанил сегодня жгут от блока предов к эбу. Ничего критичного, на одном черно-белом проводе была небольшая потертость от гофры, провода сколько смог, попробовал на разрыв. Никаких претензий. Единственное удивило, ближе к коробке предов в пластиковом кожухе нарыл два стыка проводов. Судя по всему силовых (красный и черный) с раздвоением и уменьшением сечения. Стыки заделаны на вид качественно, в термоусадке с клеем или смолой какой-то, в общем, вроде гуд.
Жгут замотал в тряпочную изоленту и засунул на место.
На авто установлен МЗ не оригинал. Возможно, из-за него проблемы. Пробовал диагностировать опкомом со снятым разъемом МЗ после сброса клеммы ака, траблы те же.
Мож, кто сталкивался, подскажите, в какую сторону рыть?Как вычислить, эбу это либо другой блок (или вообще проводка)
Источник
Vectra Club Russia
CAN шина или опять CIM глючит?
CAN шина или опять CIM глючит?
Сообщение ConstantinS » 28 апр 2014 22:17
В общем проблемка следующая. Периодически в пути стали появляться разные значки типа машинки с ключем, есп, абс. Машина работает не глохнет. Глушу завожу все работает.
Иногда не заводится, помогает сброс с клеммы акума на секунд 10.
Ошибки следующие (сразу сделаю выжимку):
Source Address: CIM
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
Source Address: ECM
P1565 —
(72) — Not present
U2103 — CAN-Bus Node no Communication
(70) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
P1811 — Torque Signal Malfunction (CAN)
(72) — Not present
Source Address: ABS/TC/ESP
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — Invalid Data from ECM (Engine Control Module)
(72) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
U2142 — CAN-Bus No Communication with YRS (Yaw Rate Sensor)
(00) — Not present
U2143 — CAN-Bus No Communication with SAS (Steering Angle Sensor)
(00) — Not present
Source Address: EHPS
U2105 — CAN-Bus no Communication with ECM (Engine Control Module)
(00) — Not present
U2105 — CAN-Bus ECM Message Range/Performance
(71) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(00) — Not present
U2139 — CAN-Bus CIM Message Range/Performance
(71) — Not present
Source Address: IPC
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(7F) — Not present
Источник
Can bus Opel Astra h ошибка sim
Opel Astra H
Покупка новой машины — дело хоть и приятное, но весьма затратное. Желающие сэкономить ищут авто на вторичном рынке — здесь дешевле. Чтобы покупка оказалась удачной, нужно знать, на что следует обратить пристальное внимание.
Смотать пробег на «Астре» сравнительно просто, достаточно заменить щиток приборов более свежим. Не полагайтесь на показания одометра! Лучше сопоставьте километраж с отметками в сервисной книжке, попросив дилера проверить по базе данных подлинность прохождения ТО. Заодно закажите полную диагностику — не так это дорого по сравнению с ценой самого «кота в мешке». Кстати, существует негласное правило: если спецы обнаружат лишь недостатки, честно названные продавцом, — диагностика за ваш счет, а если найдутся скрытые дефекты, расплачивается «забывчивый» продавец. Только договариваться об этом нужно заранее.
Чаще других глючит модуль СIM рулевой колонки: давишь на клаксон, а он молчит. Другие кнопки, расположенные на руле, тоже порой не работают, при этом аудиоцентр может перестать реагировать на собственные органы управления. На ранней стадии дефект имел случайный характер, поэтому долго не удавалось установить причину. Меняли модуль по гарантии, перепаивали контакты, собирая один блок из нескольких, — не помогало. В итоге пришли к простому и надежному решению: в 2009 году внедрили стальную П-образную скобу, сжимающую половинки корпуса и обеспечивающую надежный контакт. Для справки: цена такой железки всего 8 рублей.
Все кнопки на руле этой машины пока работают без сбоев благодаря смекалке владельца — половинки корпуса подрулевого модуля CIM он перетянул бинтовой резиной. Разумная альтернатива фирменной П-образной скобе!
ОПОРНО-ДВИГАТЕЛЬНЫЙ АППАРАТ
Больше всего хлопот доставляет модуль зажигания, вставляемый своими выводами непосредственно в свечные колодцы. Со временем концы трескаются (такое случается и при небрежной замене свечей), и тогда, считай, приехали. Другая причина — несвоевременная замена свечей. По регламенту положено каждые 30 тыс. км, однако бывает, что центральный электрод к тому времени значительно укорачивается вследствие эрозии, отчего искровой промежуток увеличивается. Соответственно возрастает пробивное напряжение — и модуль сгорает. Рекомендуем проверять свечи при каждом ТО (15 тыс. км) и корректировать зазор. Нелишне возить с собой запасной модуль, причем в надежной упаковке, чтобы не раскололся, летая по багажнику.
Диодный мост генератора выгорает обычно вследствие оплошности самого владельца: повредил где-нибудь в колее правый грязезащитный щиток моторного отсека и вовремя его не поменял. Через дыру грязь летит прямиком на генератор, забивая его внутренности. Разумеется, не выдерживает и сам агрегат, и поликлиновой ремень, его приводящий.
На «астры» устанавливали два типа рулевых реек — с электрическим и с электрогидравлическим усилителем, причем в разных модификациях, счет которым даже специалисты потеряли. Одни механизмы радуют адекватным усилием и четкой обратной связью на руле, другие, мягко говоря, не очень. Основные претензии к ЭГУРу: даже исправный агрегат работает неидеально, а порой отказывает из-за перегрева. Хорошо хоть, не рулит куда вздумается! Чтобы вернуть механизм в рабочее состояние, нужно подождать, пока он остынет.
Передняя подвеска: шаровые опоры приклепаны к рычагам, что на данной модели разумно: ресурс опор, сайлент-блоков и самих рычагов (из-за усталостных трещин) примерно одинаков — под 180 тыс. км. Тормозные колодки изнашиваются к 30–40 тыс. км, диски служат вдвое дольше.
В отказе антиблокировочной системы чаще всего повинны передние датчики, а заменить их отдельно от ступицы нельзя. Реже ступицу приходится менять из-за износа подшипника. И то и другое обходится недешево. К задним ступицам претензий нет.
«АСТРА»: ЛОГИЧЕСКИЙ ПРОГНОЗ
Компактвэн «Зафира В», построенный на базе «Астры Н», имеет схожий перечень болезней, однако проблемы с радиатором двигателя и опорными подшипниками стоек его не коснулись, поскольку здесь другой набор узлов и агрегатов, а также усилены некоторые детали подвесок. Поэтому, когда вас убеждают, что построенные на одной платформе машины страдают одинаковыми врожденными дефектами, знайте: это далеко не всегда так.
за содействие в подготовке материала.
Источник
Ошибка по can шине опель астра h
Тема: Проблемы с кан — шиной
Проблемы с кан — шиной
Всем привет )
Новый подарок от жопиля. Заглючила кан-шина!
По диагностике опкомом периодически всплывают ошибки по кан-шине и по разным блокам. Постоянства нет.
С года полтора назад, когда перецеплял гамнитолу, в разъеме штатной аудио системы кан шина имела напругу в 2.5 В. Теперь 0,18, только мерил в обд разъеме.
Сопротивление около 60-65 Ом. Мерил профи прибором, взятом у коллег, т.к. китайский сопротивление показывать особо не хотел (значение не устаканивалось)
В нескольких темах почитал про «укус куницы», раздербанил сегодня жгут от блока предов к эбу. Ничего критичного, на одном черно-белом проводе была небольшая потертость от гофры, провода сколько смог, попробовал на разрыв. Никаких претензий. Единственное удивило, ближе к коробке предов в пластиковом кожухе нарыл два стыка проводов. Судя по всему силовых (красный и черный) с раздвоением и уменьшением сечения. Стыки заделаны на вид качественно, в термоусадке с клеем или смолой какой-то, в общем, вроде гуд.
Жгут замотал в тряпочную изоленту и засунул на место.
На авто установлен МЗ не оригинал. Возможно, из-за него проблемы. Пробовал диагностировать опкомом со снятым разъемом МЗ после сброса клеммы ака, траблы те же.
Мож, кто сталкивался, подскажите, в какую сторону рыть?Как вычислить, эбу это либо другой блок (или вообще проводка)
«Ошибки»
#1 Brandy


- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
Одновременно выжимаем педали газа и тормоза и держим
Только ПОТОМ вставляем ключ в замок зажигания
Включаем зажигание (но не заводим машину . )
Ждем несколько секунд, удерживая педали, до появления сообщения
Вставляем ключ в замок зажигания.
Включаем зажигание (двигатель не заводим!)
Нажимаем на педаль тормоза и держим
Переключаем селектор АКПП в положение «D» (Drive)
Выключаем зажигание и отпускаем тормоз.
Нажимаем теперь уже вместе педаль газа, педаль тормоза и держим.
Включаем зажигание (двигатель не заводим!)
Ждем несколько секунд, удерживая педали, до появления сообщения
полный перечень кодов ошибок мышкой сюда ТЫЦ
за перечень кодов спасибо можно сказать юзеру Гжегош
за инструкцию — спасибо можно сказать юзеру CD-167-101
зы. для надежности прикрепил коды ошибок сюда [attachmentid=83987]
#2 Roman79
- Автомобиль: Astra H (z16xer)
- @Упоминание
#3 berkut

- Город: Москва, ТиНАО, ПБ
- Автомобиль: 1,8 (LPG)
- @Упоминание
разгадывание авто»электро головоломок», ремонт и восстановление электропроводки без пайки и скруток, поиск обрывов и потерявшихся сигналов, убирание «соплей» и пр.
#4 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
#5 Roman79
- Автомобиль: Astra H (z16xer)
- @Упоминание
#6 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
Вот как думают на сервисе (цитата с другого форума, который просматривают сотрудники сервиса):
Да не надо на нас обижаться, что мы такие не умелые.
В твоем случае просто ситуация неадекватная, вычислить её просто так нельзя. В какоё-то момент происходит потеря связи между блоками. Виной может служить один из блоков, а вот который так себя ведет и почему и при каких обстоятельствах — очень тяжело ответить. Согласись, что это временный глюк и поймать его тяжело.
Хотя скажу честно, у меня есть и вторая такая машина, тоже не могу пока поймать неисправность, она уже месяц у нас стоит (симптомы как и у тебя).
И еще. в ответ на мой упрек:
Зря ты так. Делаем и делаем то, что в наших силах. Про твой случай — не всё так просто. Скажу даже больше, что понять, что происходит на авто не так уж и просто, даже сканер подцепленный во время движения не поможет, почему то есть у меня такая уверенность, просто на момент глюка и он потеряется на связи по высокоскоростной шине, а вот кто в этом виноват, блоков то много и любой из них может нести такой «сумбур», что.
Проводка, да может быть, замыкание на массу, плюс или между собой. Но при этом не появиться ряд ошибок, которые выскакивают у тебя. Монтажник (подкапотник) — вполне возможно, но он только выполняет роль сцепки проводов и по логике не должен никак вмешиваться в работу (хотя черт его знает. Тут я сам сомневаюсь). А проводку я вскрывал , на другой машине (у неё симптомы, ошибки в памяти, поведение как у тебя)
Ищем. И с другими городами я созванивался, ни у кого из тех кого я знаю подобного не было.
Во как. Завтра опять поеду. Счастья пытать.
#7 berkut
- Город: Москва, ТиНАО, ПБ
- Автомобиль: 1,8 (LPG)
- @Упоминание
разгадывание авто»электро головоломок», ремонт и восстановление электропроводки без пайки и скруток, поиск обрывов и потерявшихся сигналов, убирание «соплей» и пр.
#8 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
#9 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
Сейчас забирал машину для очередного эксперимента от моих горемык (они че-то делают, а я гоняю, пока не заглохну. Потом опять. Уже 10 дней). Увидел у них злость в глазах и здоровый азарт. Я думаю, тут два варианта: либо они совсем ушатают Астроид либо починят. Решил остаться пока в их власти. Я за здоровый кипиш!
Началась битва: ОПЕЛЬ против суровых сибирских диагностов-натуралов. Буду вести репортажи с поля боя.
#10 berkut
- Город: Москва, ТиНАО, ПБ
- Автомобиль: 1,8 (LPG)
- @Упоминание
разгадывание авто»электро головоломок», ремонт и восстановление электропроводки без пайки и скруток, поиск обрывов и потерявшихся сигналов, убирание «соплей» и пр.
#11 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
#12 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
Поехал за запчастью в другой сервис, меня там спросили как поняли, что это именно катушка? Когда я объяснил, сказали, что катушка так не умирает. Основной их аргумент, что когда умирает катушка, то стартер при повторном заводе после того как заглох «крутит», да и при движении колбасит движок не по-детски (цилиндр(ы) ведь не работают). А то, что намотал 120 км- это просто совпало. У меня на самом деле тишина какое-то время, то есть когда поворачиваешь ключ, то вообще никакой реакции нет, только сзади что-то щелкает. Да и не колбасит.
Вот и пойми кто прав. Как думаете, может из-за катушки быть моя проблема? Пока тормознулся я с ее приобретением.
#13 Brandy
- Город: Кемерово
- Автомобиль: Opel Astra H. 5dr. 1.6, Z16XEP, 120 000 км
- @Упоминание
Есть вот такое мнение другого форума:
Если накоротко замкнуть CAN (high-speed), т.е. полностью вывести его из строя, то отрубается все: приборка, ABS, ESP, IDS+, AirBag и т.д. НО, двигатель не глохнет! (проверял на Z18XER) Заглушить нельзя, завести не получается, педаль газа умирает, но на холостом ходе работает! Вывод: ошибки Uxxxx, это не причина, это побочный эффект или совпадение.
А вот если оборвать провод до катушки, то заглохнет 100%, сразу и будет куча ошибок.
Только не понял: менять катушку или «прозвонить» проводку до нее?
#14 Главспец
- Город: Москва, ЮВАО
- Автомобиль: Hyundai Santa Fe 2.2 CRDI
- @Упоминание
Тема: Ошибки «Нет связи CAN-BUS»
Ошибки «Нет связи CAN-BUS»
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Походу питалово отвалилось. Звони все преды тестером. Не на вид, а именно тестером.
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
Ошибки, в точности как в соседней ветке ( http://astraclub.ru/threads/61519-Пр. -Нужна-помощь .)
000970 похоже на U0009 High Speed CAN Communication Bus (-) shorted to Bus (+)
012170 похоже на U0121 Lost Communication With Anti-Lock Brake System (ABS) Control Modul
014070 похоже на U0140 Lost Communication With Body Control Module
040272 похоже на U0402 Invalid Data Received From Transmission Control Module
041572 похоже на U0415 Invalid Data Received From Anti-Lock Brake System Control Module
0501F0 похоже на P0501 Vehicle Speed Sensor A Range/Performance
056472 похоже на P0564 Cruise Control M ulti-Function Input A Circuit
065070 похоже на P0650 Malfunction Indicator Lamp (MIL) Control Circuit Malfunction
161300 похоже на P1613 Loss of DIM Serial Data
С недавненго времени опком перестал входить в блоки. Редко когда зайдет в ЭБУ и сразу же виснет при просмотре измерительных данных. В трансмиссию заходит, видит 2103. Но неактивны все другие кнопки (измерительные).
Источник
Обновлено: 12.06.2023
Ошибки «Нет связи CAN-BUS»
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Подскажите, куда копать.
Постоянно висят ошибки:
U0009 Не связи с узлом CAN-BUS
U0121 Нет связи CAN-BUS с АБС/сист. предотвр. скольжения
U0101 Нет связи CAN-BUS с модулем управления трансмиссией
U0140 Нет связи CAN-BUS с CIM (модулем рулевой колонки)
P1613 Отсутствует либо неправильный сигнал иммобилайзера
P1614 Получен неправильный сигнал иммобилайзера Иммобилизатор
P1614 Неправильный транспондерный ключ Иммобилизатор
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Подскажите пожалуйста, при этом машина едет (тупит, особенно после прогрева двигателя, у меня отдельная ветка идет по этой проблеме). Через определенный промежуток времени загорается машина с ключом. Тупить совсем начинает. Если машину заглушить и сразу же завести, то машинка тупит, но машина с ключом некоторе время не загорается.
Это может быть из-за предохранителя? Или сопля на проводке или клемме? Есть ли определенные слабые места?
Буду признателем за ответ.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
Если есть машина с ключом — можно попробовать считать код ошибки педалями.
Вообще стоит все же не прибегая к педальному методу все же опкомом или теком смотреть АЦП всех датчиков и исполнительных механизмов, чего тут на гуще гадать.
С недавненго времени опком перестал входить в блоки. Редко когда зайдет в ЭБУ и сразу же виснет при просмотре измерительных данных. В трансмиссию заходит, видит 2103. Но неактивны все другие кнопки (измерительные).
С недавненго времени опком перестал входить в блоки. Редко когда зайдет в ЭБУ и сразу же виснет при просмотре измерительных данных. В трансмиссию заходит, видит 2103. Но неактивны все другие кнопки (измерительные).
Вопрос: могут ли одновременно гореть и машинка с ключиком и чек?
В вызодные стал проверять от чего тупит машина методом отключения датчиков. Отключил вторую лямбду. Покатался около 20 км. Только с третьей остановки/пуске ЭБУ заметил, что лямбда отсутствует. Зажег чек. При этом машинка с ключиком больше не загоралась. Пока езжу без второй лямбды. Возможно поведение машинки стало чуть получше, может это субъективно. пока не понял. Но ЦЗ стал работать замечательно. Открывает и закрывает машину по легкому нажатию на ключ. У меня были ошибки 1613 и 1614. Думал, дело в ключе: чимстил, менял батарейку. Давил на кнопку — закрывалось и открывалось неохотно. Сейчас все замечательно!
Большая просьба сказать где находится датчик детонации и датчик температуры двигателя для ЭБУ который?
второй датчик кислорода ( у OPEL )-диагностический , в управлением ДВС участия не принимает
1613и 1614 надо попробовать сменить ПО CIM
датчик детонации на блоке с стороны моторного щита
температурный кажись на термостате
1613и 1614 надо попробовать сменить ПО CIM
датчик детонации на блоке с стороны моторного щита
температурный кажись на термостате
А как меняется ПО? С помощью чего?
Сегодня лазил с опкомом. Итог: не могу попасть в блоки по высокой стороне. Даже в шлюз (CIM). Все другие (и средняя и низкая) прекрасно читаются и программируются. Я так понимаю, надо начинать плясать от сима?
Дерганье разъема сима в рулевой колонке эффекта не дало.
Соответственно, не могу попасть в ECM и посмотреть датчики. Машинка продолжает тупить.
Надо попробовать разобраться со схемой и посмотреть куда идут провода от диагностической колодки. Сколько проводов высокой кан приходит на колодку?
Возможно ли что коротит один из блоков (например АБС или ЭГУР)? И можно ли проверить отключением блока (выдергиванием колодки)? Не повредится ли чего-нибудь?
ОПЕЛЬ ЗАФИРА 2001г.в.МКПП 1.8л .Хозяин говорит,что пропал дальний свет и он просмотрел все предохранители в блоке при выкл зажиг ,преды целые ,вынул лампы-сгоревшие.После этого вырубился электронасос ГУРа,обороты стали плавать,В одном сервисе,сняв клеммы и сомкнув их с собой,скинули ошибки,обороты немного выровнялись.Но ГУР не работает. Я так же просмотрел все предохр, скидывал клеммы ,обороты стали плавать и вырубились тормоза.У соседа-диагноста посмотрели на сканере,ошибка ДМРВ и остальные системы на связь не выходят.Он предположил что оборвалась CAN шина.Возможно ли такое и куда копнуть?
ОПЕЛЬ ЗАФИРА 2001г.в.МКПП 1.8л ..У соседа-диагноста посмотрели на сканере,ошибка ДМРВ и остальные системы на связь не выходят.Он предположил что оборвалась CAN шина.Возможно ли такое и куда копнуть?
Почему тогда не включаются насос ГУРа и АБС?
Почему тогда не включаются насос ГУРа и АБС?Предохр все целые
Логическая цепочка вполне выстроилась, насос ГУРа невключается, и АБС, потому как нет CAN-шины, значит вполне логично поискать её, на длителной стоянке вполне пионеры могли отвинтить, или крысы сгрысть.
А где вы её искали? Наверняка электроны а цепях прошлогодние, да икрышка инжектора неприкручена,
з.ы.Да там целый букет неисправностей, отдайте в мастерскую.:)
Как раз это вам и стоит выяснить!
А разве это единственное условие, для работи того или другово устройства?
Схему подключения этих устройств смотрели?
Почему остальние устройства на связь не выходит, выясняли?
Наверняка электроны а цепях прошлогодние, да икрышка инжектора неприкручена,
з.ы.Да там целый букет неисправностей, отдайте в мастерскую.:)[/QUOTE]
Я примерно так и сделал, отправил к официалам.Попытаюсь выпытать у хозяина в чём было дело.
Не знаю. Сегодня был OPEL Zafira с неработающей катушкой в моноблоке, он это заменил, приехал потом ошибку снять, я по OBD подключился — соединился через CAN — висела ош. по пропускам в 4ц (где КЗ не работала), ошибка стёрлась.
А каким образом блок ABS обменивается инфой с приборным блоком?
Ну интересно — как понять: с какого года на какой машинке есть CAN шина и как дефектуется потеря связи между ними?
А то и звонить эту витую пару пробовал, но методы проверки не знаю.
А чё там обмениватся то особенно? Скорость автомобиля передать, да и лампочку (или 2) зажеч. Если реч идёт о Зафире 2001 года, то скорость с АБСа передаётся по обшей шине скорости автомобиля (1 провод, на которий ШИМ сигнал передаётся)). По этому сигналу панель и пробег расчитивает. Ну а на лампочки отдельние провода с АБСа идут. Вообще, на Зафирах-А , если и есть КАН шини ( в зависимости от года выпуска), то только локальние ( Моторник-АБС, может и автомат коробка, могут ещо некоторие быть, в зависимости от комплектации машини и года выпуска.), Но всеобщей КАН шини на этом авто нет. Зато, на Зафире-Б уже целих три кан шин (Лов, Мид и Хай)
Схеми на авто посмотреть, проверить выведена ли КАН линия на диагностическом разёме. Тех литературу по автомобилю почитать итд.
Если не доступна дилерская инфа по конкретному авто (хотя достать ТИС, или дилерскую базу по почти любой другой марке, щас уже не проблема), очень много инфи имеется и в серёзних общих базах, таких как Бош ЕСИ, Митчел итд. Да и по тогй же автодате понять можно, хоть там и нету более подробной, специфической инфи, но схеми то имеются.
и как дефектуется потеря связи между ними?
А то и звонить эту витую пару пробовал, но методы проверки не знаю.
Ну о способов проверки КАН шин, информации уже полоно в нете. Да и в тех литературе по конкретному автомобилю тоже указани проверки, связанние с проверкой КАН шини на конкретном авто
Zafira-A,или Zafira-B? Какого года выпуска автомоиль в вашем случае? Не надо путать эти машини! Они устроенни совершенно по другому, и не могут быть сравнени друг с другом. Обшее у них только название- Zafira
Вопрос о наличии КАН шини на машинах, носил общий характер, поэтому упоменул и Митчел. Что косается, именно Опеля, естественно в Митчеле его нет.
Zafira-A,или Zafira-B? Какого года выпуска автомоиль в вашем случае? Не надо путать эти машини! Они устроенни совершенно по другому, и не могут быть сравнени друг с другом. Обшее у них только название- Zafira
Если вы подключались по ОБД, то не факт, что он по КАН соеденялся. Ну, или эта уже была Zafira-B.
Не вдавался в подробности. При выборе протокола в OБД когда выбрал CAN — то пошла связь, по другим — не соединился.
ОПЕЛЬ ЗАФИРА 2001г.в.МКПП 1.8л .Хозяин говорит,что пропал дальний свет и он просмотрел все предохранители в блоке при выкл зажиг ,преды целые ,вынул лампы-сгоревшие.После этого вырубился электронасос ГУРа,обороты стали плавать,В одном сервисе,сняв клеммы и сомкнув их с собой,скинули ошибки,обороты немного выровнялись.Но ГУР не работает. Я так же просмотрел все предохр, скидывал клеммы ,обороты стали плавать и вырубились тормоза.У соседа-диагноста посмотрели на сканере,ошибка ДМРВ и остальные системы на связь не выходят.Он предположил что оборвалась CAN шина.Возможно ли такое и куда копнуть?
schumaster
ОПЕЛЬ ЗАФИРА 2001г.в.МКПП 1.8л ..У соседа-диагноста посмотрели на сканере,ошибка ДМРВ и остальные системы на связь не выходят.Он предположил что оборвалась CAN шина.Возможно ли такое и куда копнуть?
Почему тогда не включаются насос ГУРа и АБС?
Почему тогда не включаются насос ГУРа и АБС?Предохр все целые
schumaster
keban
Логическая цепочка вполне выстроилась, насос ГУРа невключается, и АБС, потому как нет CAN-шины, значит вполне логично поискать её, на длителной стоянке вполне пионеры могли отвинтить, или крысы сгрысть.
А где вы её искали? Наверняка электроны а цепях прошлогодние, да икрышка инжектора неприкручена,
з.ы.Да там целый букет неисправностей, отдайте в мастерскую.
Deniska
Как раз это вам и стоит выяснить!
А разве это единственное условие, для работи того или другово устройства?
Схему подключения этих устройств смотрели?
Почему остальние устройства на связь не выходит, выясняли?
euphoria
з.ы.Да там целый букет неисправностей, отдайте в мастерскую.[/QUOTE]
Я примерно так и сделал, отправил к официалам.Попытаюсь выпытать у хозяина в чём было дело.
schumaster
Не знаю. Сегодня был OPEL Zafira с неработающей катушкой в моноблоке, он это заменил, приехал потом ошибку снять, я по OBD подключился — соединился через CAN — висела ош. по пропускам в 4ц (где КЗ не работала), ошибка стёрлась.
А каким образом блок ABS обменивается инфой с приборным блоком?
Ну интересно — как понять: с какого года на какой машинке есть CAN шина и как дефектуется потеря связи между ними?
А то и звонить эту витую пару пробовал, но методы проверки не знаю.
А чё там обмениватся то особенно? Скорость автомобиля передать, да и лампочку (или 2) зажеч. Если реч идёт о Зафире 2001 года, то скорость с АБСа передаётся по обшей шине скорости автомобиля (1 провод, на которий ШИМ сигнал передаётся)). По этому сигналу панель и пробег расчитивает. Ну а на лампочки отдельние провода с АБСа идут. Вообще, на Зафирах-А , если и есть КАН шини ( в зависимости от года выпуска), то только локальние ( Моторник-АБС, может и автомат коробка, могут ещо некоторие быть, в зависимости от комплектации машини и года выпуска.), Но всеобщей КАН шини на этом авто нет. Зато, на Зафире-Б уже целих три кан шин (Лов, Мид и Хай)
Схеми на авто посмотреть, проверить выведена ли КАН линия на диагностическом разёме. Тех литературу по автомобилю почитать итд.
Если не доступна дилерская инфа по конкретному авто (хотя достать ТИС, или дилерскую базу по почти любой другой марке, щас уже не проблема), очень много инфи имеется и в серёзних общих базах, таких как Бош ЕСИ, Митчел итд. Да и по тогй же автодате понять можно, хоть там и нету более подробной, специфической инфи, но схеми то имеются.
и как дефектуется потеря связи между ними?
А то и звонить эту витую пару пробовал, но методы проверки не знаю.
Ну о способов проверки КАН шин, информации уже полоно в нете. Да и в тех литературе по конкретному автомобилю тоже указани проверки, связанние с проверкой КАН шини на конкретном авто
Zafira-A,или Zafira-B? Какого года выпуска автомоиль в вашем случае? Не надо путать эти машини! Они устроенни совершенно по другому, и не могут быть сравнени друг с другом. Обшее у них только название- Zafira
CAN шина или опять CIM глючит?
В общем проблемка следующая. Периодически в пути стали появляться разные значки типа машинки с ключем, есп, абс. Машина работает не глохнет. Глушу завожу все работает.
Иногда не заводится, помогает сброс с клеммы акума на секунд 10.
Ошибки следующие (сразу сделаю выжимку):
Source Address: CIM
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
Source Address: ECM
P1565 —
(72) — Not present
U2103 — CAN-Bus Node no Communication
(70) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
P1811 — Torque Signal Malfunction (CAN)
(72) — Not present
Source Address: ABS/TC/ESP
U2103 — No Communication with CAN-Bus (High Speed)
(00) — Not present
U2105 — Invalid Data from ECM (Engine Control Module)
(72) — Not present
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(00) — Not present
U2142 — CAN-Bus No Communication with YRS (Yaw Rate Sensor)
(00) — Not present
U2143 — CAN-Bus No Communication with SAS (Steering Angle Sensor)
(00) — Not present
Source Address: EHPS
U2105 — CAN-Bus no Communication with ECM (Engine Control Module)
(00) — Not present
U2105 — CAN-Bus ECM Message Range/Performance
(71) — Not present
U2139 — CAN-Bus No Communication with CIM (Steering Column Module)
(00) — Not present
U2139 — CAN-Bus CIM Message Range/Performance
(71) — Not present
Source Address: IPC
U2105 — CAN-Bus No Communication with ECM (Engine Control Module)
(7F) — Not present
Кто что подскажет? Куда копать?
все ошибки неактивные
100% контакт в разьеме сима
вектра глючная вообще.вчера при нажатии на парктроник загорелась машинка с ключом и аккумулятор.заглушил и все потухло
а в том году руль перестал крутиться .без всяких ошибок на дисплее.перезавод так же помог .больше не повторялось

всем привет .
нужна помощь !
не так давно появился такой глюк . не переключалась на 3 скорость, едешь 1-2 еще ничего норм 3 — ошибка и Ф
далее 1-2 ошибка — кое как доехал на первой скорости до дома км 1,5 .
на след день ездила как обычно .
потом Ф начала постоянно появляться,
снял акум посмотрел в изитронике жижу там были ниже риски на 1 см высосал старую дот 4 долил новую оригинальную.завелась, поездил специально 10 км . обрадовался думал вот в чем проблема а хрен там ((((
потом незаводилась вообще неделю гдето . наулице то -5 то -20 .
на панели приборов светомузыка, то абс моргает то стрелка топлива прыгает до этого и спидометр прыгал при заведеном моторе .
далее тажа светомузыка и не заводилась вообще на екране переключения скоростей сначала Ф был потом два прочерка —
щас прочерки через секунд 15 появляються, счелкает реле при зажигании но не заводиться вообще .
подключил вчера опком на мотор кое как заходит, вот такие ошики сначала считал,
Total number of fault codes: 10
P1700 — Service Vehicle Soon Request from Transmission Control Module
(00) — Present
U0402 — Invalid Signal from TCM (Transmission Control Module)
(72) — Not present
U0140 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
U0121 — CAN-Bus no Communication with ABS/TC
(70) — Not present
U0101 — CAN-Bus no Communication with Transmission Control Module
(70) — Not present
P0650 — CAN-Bus Failure — No CAN-Message
(70) — Not present
P1613 — Immobiliser No Or Wrong Signal
(00) — Not present
P1614 — Immobiliser Wrong Signal Received
(00) — Not present
U0415 —
(72) — Not present
далее сбросил и получил такие ошибки,
U0009 —
(70) — Not present
P1700 — Service Vehicle Soon Request from Transmission Control Module
(00) — Present
U0140 — CAN-Bus No Communication with CIM (Steering Column Module)
(70) — Not present
P0650 — CAN-Bus Failure — No CAN-Message
(70) — Not present
P1613 — Immobiliser No Or Wrong Signal
(00) — Present
U0415 —
(72) — Not present
на коробку незаходит .
другие модули тоже походу не все видит .
поковырялся замерз, на мотор тоже заходит рас потом гонит надо выключать зажигание, вытаскивать усби с оп кома .
че делать куда копать ? Ребят помогите сломал голову просто .
а еще до етого один рас была фигня непонятная при заведении мигали лампы передние грешил на генератор . напряжение при включеных ближних фарах около 11,7
зеленый индикатор заряда на акумуляторе .
до етого и с более ниским напряжением заводилась, пугает то что оп ком не видит модули и светомузыка на приборке .
гдето читал может еще провода. вообщем кто с талкивался? что смотреть куда копать ? в нете не тнашол инфы четкой .
дополнил
не заведенная когда 11,7 с включенными фарами . она не крутит даже стартер щас . генератор щас проверить не могу так как не крутит вообще . щелк щелк и все когда ключем вертишь . вообще акумы у меня оба рабочих полностью заряженные под нагрузкой более 12,7 не давали и это их по сути предел . вот когда генератор заряд дает тогда да по БК показывало около 14 В . но щас то не крутит вообще.
вообщем я тоже на провода грешил но холодно блин и не слякотно . — странно капец . какие еще версии ? на выходных полезу звонить провода . где смотреть ?
на глюки коробки от пониженого напряжения непохоже . — но я на всякий случай сниму акум и заряжу на полную. и сразу с зарядки отнесу поставлю попробую еще .
то что опком блочит . ладно так светомузыка и с ним и безнего на приборки горит почти все . я запишу потом какие лампочки в первый рас такое .
Читайте также:
- Tractor abs ошибка ман
- Ошибка p160900 система отключения при ударе skoda
- 263838 ошибка опель астра h
- E01 ошибка baxi после отключения газа
- Ошибка 00604 ауди а4 б6
-
Здравствуйте, Уважаемый!
Уточните пожалуйста, а фактический расход топлива увеличился или только по бортовому компьютеру?Балаково, Kia Ceed
-
ТОК ПО БОРТОВОМУ
Исландия, Opel Astra
-
Исландия, Opel Astra

-
ДВА ДНЯ СКАКАЛА ПРИЕХАЛ НА ДИАГНОСТИКУ ВСЕ ПРОПАЛО И РАСХОД МОМЕНТАЛЬНЫЙ СТАЛ ПРИ НАЖАТИИ НА ПЕДАЛЬ 37 Л ПРИ БРОСАНИИ ПЕДАЛИ 1.2Л А БЫЛО ВСЕ НАОБОРОТ
Исландия, Opel Astra
-
U0009 — CAN-Bus Node no Communication.
U2105 — CAN-Bus No Communication with ECM (Engine Control Module), стоит проверить разъем и массу ЭБУ, блока предохранителей под капотом, массу двигателя.
U2100-00 — No communication with CAN-bus (mid speed). Все ошибки сетевые, по CAN-шине.Балаково, Kia Ceed
-
Так у вас же есть уже чёткое указание на причину такого поведения бортового компьютера- есть же коды неисправностей! Вот и проводите по ним проверки, как предписывает производитель- напряжения, сопротивления, корректность передаваемой информации, состояние разъёмов и соединителей- всё как обычно.
-
Исландия, Opel Astra



Need a practical intro to CAN bus errors?
In this tutorial you’ll learn about the basics of CAN error handling, the 5 CAN bus error types, the CAN
error frame and CAN node error states.
To get practical, we’ll also generate & record CAN errors in 6 experiments.
In this article
- What are CAN bus errors?
- The CAN error frame
- 5 CAN error types
- States & error counters
- 6 practical experiments
- LIN bus errors
- CAN error logging use cases
- FAQ

What are CAN bus errors?
As explained in our simple intro
to CAN
bus, the Controller Area Network is today the de facto standard across automotives and industrial
automation
systems.
A core benefit is the robustness of CAN, making it ideal for safety critical
applications.
Here, it is worth noting:
Error handling is vital to the robustness of CAN.
CAN bus errors can occur for several reasons — faulty cables, noise, incorrect termination, malfunctioning
CAN nodes etc. Identifying, classifying and resolving such CAN errors is key to ensuring the continued
performance of the overall CAN system.
In particular, error handling identifies and rejects erroneous messages, enabling a sender to
re-transmit the message. Further, the process helps identify and disconnect CAN nodes that
consistently transmit erroneous messages.

How does CAN error handling work?
Error handling is a built-in part of the CAN standard and every CAN controller. In other words, every
CAN node handles fault identification and confinement identically. Below we’ve made a simple illustrative example:

- CAN node 1 transmits a message onto the CAN bus — and reads every bit it sends
- In doing so, it discovers that one bit that was sent dominant was read recessive
- This is a ‘Bit Error’ and node 1 raises an Active Error Flag to inform other nodes
- In practice, this means that node 1 sends a sequence of 6 dominant bits onto the bus
- In turn, the 6 dominant bits are seen as a ‘Bit Stuffing Error’ by other nodes
- In response, nodes 2 and 3 simultaneously raise an Active Error Flag
- This sequence of raised error flags comprise part of a ‘CAN error frame’
- CAN node 1, the transmitter, increases its ‘Transmit Error Counter’ (TEC) by 8
- CAN nodes 2 and 3 increase their ‘Receive Error Counter’ (REC) by 1
- CAN node 1 automatically re-transmits the message — and now succeeds
- As a result, node 1 reduces its TEC by 1 and nodes 2 and 3 reduce their REC by 1
The example references a number of concepts that we will detail shortly: Error frames, error
types, counters and states.
The CAN bus error frame
In the illustrative example, the CAN nodes ‘raise Active Error Flags’, thus creating an ‘error frame’ in
response to detecting a CAN error.
To understand how this works, let us first look at a «normal» CAN frame (without errors):

CAN bus bit stuffing
Notice that we highlighted ‘bit stuffing’ across the CAN frame.
Bit stuffing is a subtle, but vital part of the CAN standard. Basically it states that whenever a CAN node
sends five bits of the same logic level (dominant or recessive), it must send one bit of the opposite level.
This extra bit is automatically removed by the receiving CAN nodes. This process helps ensure continuous
synchronisation of the network.
As per the previous example, when CAN node 1 detects an error during the transmission of a CAN message, it
immediately transmits a sequence of 6 bits of the same logic level — also referred to as raising an Active
Error Flag.
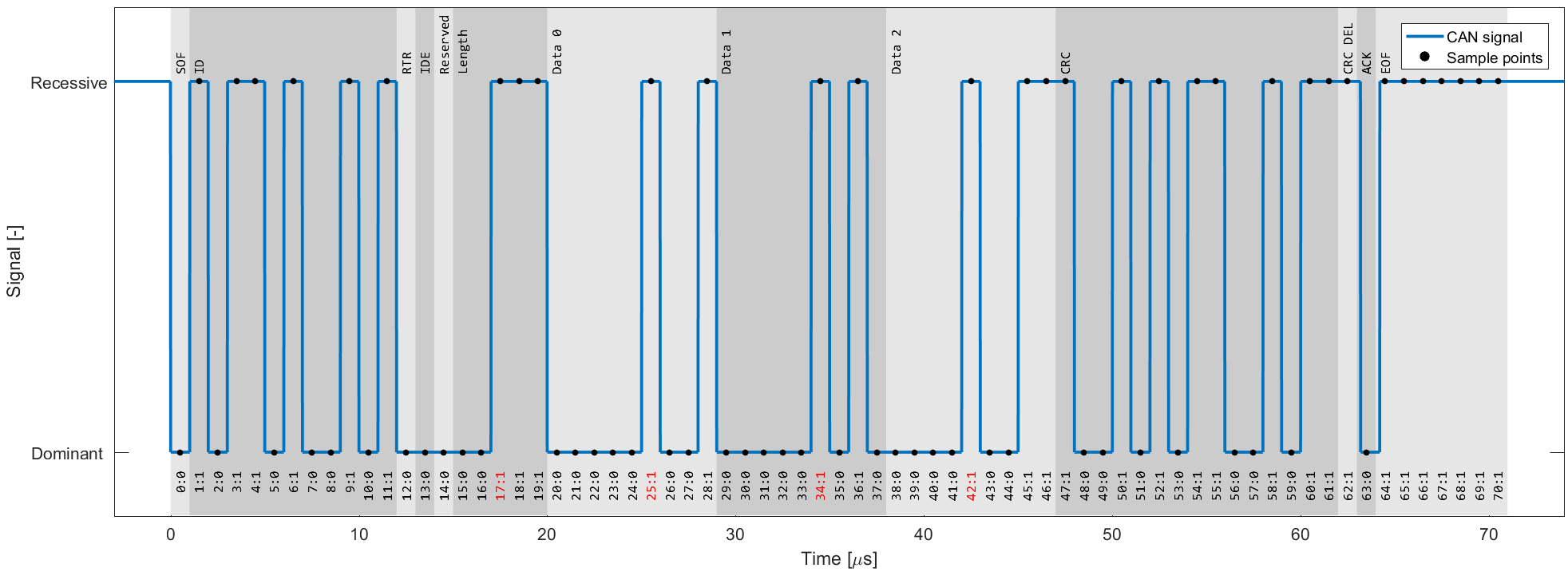
If we measure the transmission of a CAN frame via an oscilloscope and digitize the result, we can also
see the stuff bits in practice (see the red timestamp marks):


Active Error Flags
As we just learned, such a sequence is a violation of the bit stuffing rule — aka a ‘Bit Stuffing Error’.
Further, this error is visible to all CAN nodes on the network (in contrast to the ‘Bit Error’ that resulted
in this error flag being raised). Thus, the raising of error flags can be seen as a way of
«globalizing» the discovery of an error, ensuring that every CAN node is informed.
Note that the other CAN nodes will see the Active Error Flag as a Bit Stuffing Error. In
response they also raise an Active Error Flag.
As we’ll explain shortly, it is important to distinguish between the error flags. In particular, the first
error flag
(from the ‘discovering’ node) is often referred to as a ‘primary’ Active Error Flag, while
the error flags of
subsequent ‘reacting’ nodes are referred to as the ‘secondary’ Active Error Flag(s).
3 CAN error frame examples
Let’s look at three example scenarios:
Example 1: 6 bits of error flags
Here, all CAN nodes simultaneously discover that an error exists in a CAN message and raise their error
flags at the same time.
The result is that the error flags all overlap and the total sequence of dominant
bits lasts for 6 bits in total. All CAN nodes will in this case consider themselves the ‘discovering’ CAN
nodes.
This type of simultaneous discovery is less common in practice. However, it could e.g. happen as a
result of Form
Errors (such as a CRC delimiter being dominant instead of recessive), or if a CAN transmitter
experiences a bit error during the writing of a CRC field.


Example 2: 12 bits of error flags
Here, CAN node 1 transmits a dominant bit, but reads it as recessive — meaning that it discovers a Bit Error.
It immediately transmits a sequence of 6 dominant bits.
The other nodes only discover the Bit Stuffing Error
after the full 6 bits have been read, after which they simultaneously raise their error flags, resulting in
a subsequent sequence of 6 dominant bits — i.e. 12 in total.
Example 3: 9 bits of error flags
Here, CAN node 1 has already transmitted a sequence of 3 dominant bits when it discovers a Bit Error and
begins sending 6 dominant bits.
Once halfway through the primary Active Error Flag, nodes 2 and 3 recognize
the Bit Stuffing Error (due to the 3 initial dominant bits being followed by another 3 dominant bits) and
they begin raising their error flags. The result is that the sequence of dominant bits from error flags
becomes 9 bit long.

The above logic of raising error flags is reflected in what we call an ‘active’ CAN error frame.

Note in particular how the secondary error flags raised by various nodes overlap each other — and how the
primary and secondary flags may overlap as well. The result is that the dominant bit sequence from raised
error
flags may be 6 to 12 bits long.
This sequence is always terminated by a sequence of 8 recessive bits, marking the end of the error frame.
In practice, the active error frame may «begin» at different places in the erroneous CAN frame, depending on
when the
error is discovered. The result, however, will be the same: All nodes discard the erroneous CAN frame and
the
transmitting node can attempt to re-transmit the failed message.
Passive Error Flags
If a CAN node has moved from its default ‘active’ state to a ‘passive’ state (more on this shortly), it will only be
able to raise so-called ‘Passive Error Flags’. A Passive Error Flag is a sequence of 6 recessive bits as seen below.
In this case it’s relevant to distinguish between a Passive Error Flag raised by a transmitting node and a receiving
node.

Example 4: Transmitter is Error Passive
As shown in the illustration (Example 4), if a transmitter (such as CAN node 1 in our example) raises a
Passive Error Flag (e.g. in response to a Bit Error), this will correspond to a consecutive sequence of 6
recessive bits.
This is in turn detected as a Bit Stuffing Error by all CAN nodes. Assuming the other CAN
nodes are still in their Error Active state, they will raise Active Error Flags of 6 dominant bits. In other
words, a passive transmitter can still «communicate» that a CAN frame is erroneous.
Example 5: Receiver is Error Passive
In contrast, if a receiver raises a Passive Error Flag this is in practice «invisible» to all other CAN nodes
on the bus (as any dominant bits win over the sequence of recessive bits) — see also Example 5.
Effectively,
this means that an Error Passive receiver no longer has the ability to destroy frames transmitted by
other CAN nodes.

CAN error types
Next, let us look at what errors may cause CAN nodes to raise error flags.
The CAN bus protocol specifies 5 CAN error types:
- Bit Error [Transmitter]
- Bit Stuffing Error [Receiver]
- Form Error [Receiver]
- ACK Error (Acknowledgement) [Transmitter]
- CRC Error (Cyclic Redundancy Check) [Receiver]
We’ve already looked at Bit Errors and Bit Stuffing Errors briefly, both of which are evaluated at the bit
level. The remaining three CAN error types are evaluated at the message level.
Below we detail each error type:


#1 Bit Error
Every CAN node on the CAN bus will monitor the signal level at any given time — which means that a
transmitting CAN node also «reads back» every bit it transmits. If the transmitter reads a different data
bit level vs. what it transmitted, the transmitter detects this as a Bit Error.
If a bit mismatch occurs during the arbitration process (i.e. when sending the CAN ID), it is not
interpreted as a Bit Error. Similarly, a mismatch in the acknowledgement slot (ACK field) does not cause
a Bit Error as the ACK field specifically requires a recessive bit from the transmitter to be
overwritten by a dominant bit from a receiver.

#2 Bit Stuffing Error
As explained, bit stuffing is part of the CAN standard. It dictates that after every 5 consecutive bits of
the same logical level, the 6th bit must be a complement. This is required to ensure the on-going
synchronization of the network by providing rising edges. Further, it ensures that a stream of bits are not
mis-interpreted as an error frame or as the interframe space (7 bit recessive sequence) that marks the end
of a message. All CAN nodes automatically remove the extra bits.
If a sequence of 6 bits of the same logical level is observed on the bus within a CAN message (between the
SOF and CRC field), the receiver detects this as a Bit Stuffing Error aka Stuff Error.

#3 Form Error
This message-level check utilises the fact that certain fields/bits in the CAN message must always be of a
certain logical level. Specifically the 1-bit SOF must be dominant, while the entire 8-bit EOF field must be
recessive. Further, the ACK and CRC delimiters must be recessive. If a receiver finds that any of these are
bits are of an invalid logical level, the receiver detects this as a Form Error.

#4 ACK Error (Acknowledgement)
When a transmitter sends a CAN message, it will contain the ACK field (Acknowledgement), in which the
transmitter will transmit a recessive bit. All listening CAN nodes are expected to send a dominant bit in
this field to verify the reception of the message (regardless of whether the nodes are interested in the
message or not). If the transmitter does not read a dominant bit in the ACK slot, the
transmitter detects this as an ACK Error.

#5 CRC Error (Cyclic Redundancy Check)
Every CAN message contains a Cyclic Redundancy Checksum field of 15 bits. Here, the transmitter has
calculated the CRC value and added it to the message. Every receiving node will also calculate the CRC on
their own. If the receiver’s CRC calculation does not match the transmitter’s CRC, the
receiver detects this as a CRC Error.
CAN node states & error counters
As evident, CAN error handling helps destroy erroneous messages — and enables CAN nodes to retry the
transmission of
erroneous messages.
This ensures that short-lived local disturbances (e.g. from noise) will not
result in
invalid/lost data. Instead, the transmitter attempts to re-send the message. If it wins arbitration
(and there
are no errors), the message is successfully sent.
However, what if errors are due to a systematic malfunction in a transmitting node? This could
trigger an endless loop of sending/destroying the same message — jamming the CAN bus.
This is where CAN node states and error counters come in.


In short, the purpose of CAN error tracking is to confine errors by gracefully reducing the privileges of
problematic CAN nodes.
Specifically, let’s look at the three possible states:
-
Error Active: This is the default state of every CAN node, in which
it is able to
transmit data
and raise ‘Active Error Flags’ when detecting errors -
Error Passive: In this state, the CAN node is still able to
transmit data, but it now
raises
‘Passive Error Flags’ when detecting errors. Further, the CAN node now has to wait for an extra 8 bits
(aka
Suspend Transmission Time) in addition to the 3 bit intermission time before it can resume data
transmission (to
allow other CAN nodes to take control of the bus) -
Bus Off: In this state, the CAN node disconnects itself from the
CAN bus and can no
longer
transmit data or raise error flags
Every CAN controller keeps track of its own state and acts accordingly.
CAN nodes shift state depending on the value of their error counters. Specifically, every CAN node
keeps track on a Transmit Error Counter (TEC) and Receive Error Counter
(REC):
- A CAN node
enters the Error Passive state if the REC or TEC exceed 127 - A CAN node
enters the Bus Off state if the TEC exceeds 255
How do the error counters change?
Before we get into the logic of how error counters are increased/reduced, let us revisit the CAN error frame
as well
as the primary/secondary error flags.
As evident from the CAN error frame illustration, a CAN node that observes a dominant bit after its
own
sequence of 6
dominant bits will know that it raised a primary error flag. In this case, we can call this CAN
node the
‘discoverer’ of the error.
At first, it might sound positive to have a CAN node that repeatedly discovers errors and reacts promptly by
raising
an error flag before other nodes. However, in practice, the discoverer is typically also the culprit causing
errors
— and hence it is punished more severely as per the overview.

There are some additions/exceptions to the above rules, see e.g. this overview.
Most are pretty straight-forward based on our previous illustrative example. For example, it seems clear that CAN
node 1 would increase the TEC by 8 as it discovers the Bit Error and raises an error flag. The other nodes in
this
case increase their REC by 1.
This has the intuitive consequence that the transmitting node will quickly reach the Error Passive and eventually
Bus
Off states if it continuously produces faulty CAN messages — whereas the receiving nodes do not change state.
The case where a receiver raises the primary error flag may seem counter-intuitive. However, this could for
example
be the case if a receiver CAN node is malfunctioning in a way that causes it to incorrectly detect errors in
valid
CAN messages. In such a case, the receiver would raise the primary error flag, effectively causing an error.
Alternatively, it can happen in cases where all CAN nodes simultaneously raise error flags.
CAN/LIN data & error logger
The CANedge1 lets you easily
record data from 2 x CAN/LIN buses to an 8-32 GB SD card — incl. support for logging CAN/LIN errors. Simply
connect it to e.g. a car or truck to start logging —
and decode the data via free
software/APIs.
Further, the CANedge2
adds WiFi, letting you auto-transfer data to your own server — and update devices over-the-air.
learn
about the CANedge
Examples: Generating & logging error frames
We have now covered the theoretical basics of CAN errors and CAN error handling. Next, let us look at generating and
logging errors in practice. For this we will use a couple of CANedge devices — and for some tests a
PCAN-USB device.
Tip: Download the MF4 data for the tests to view the data in asammdf or CANalyzer.
download data
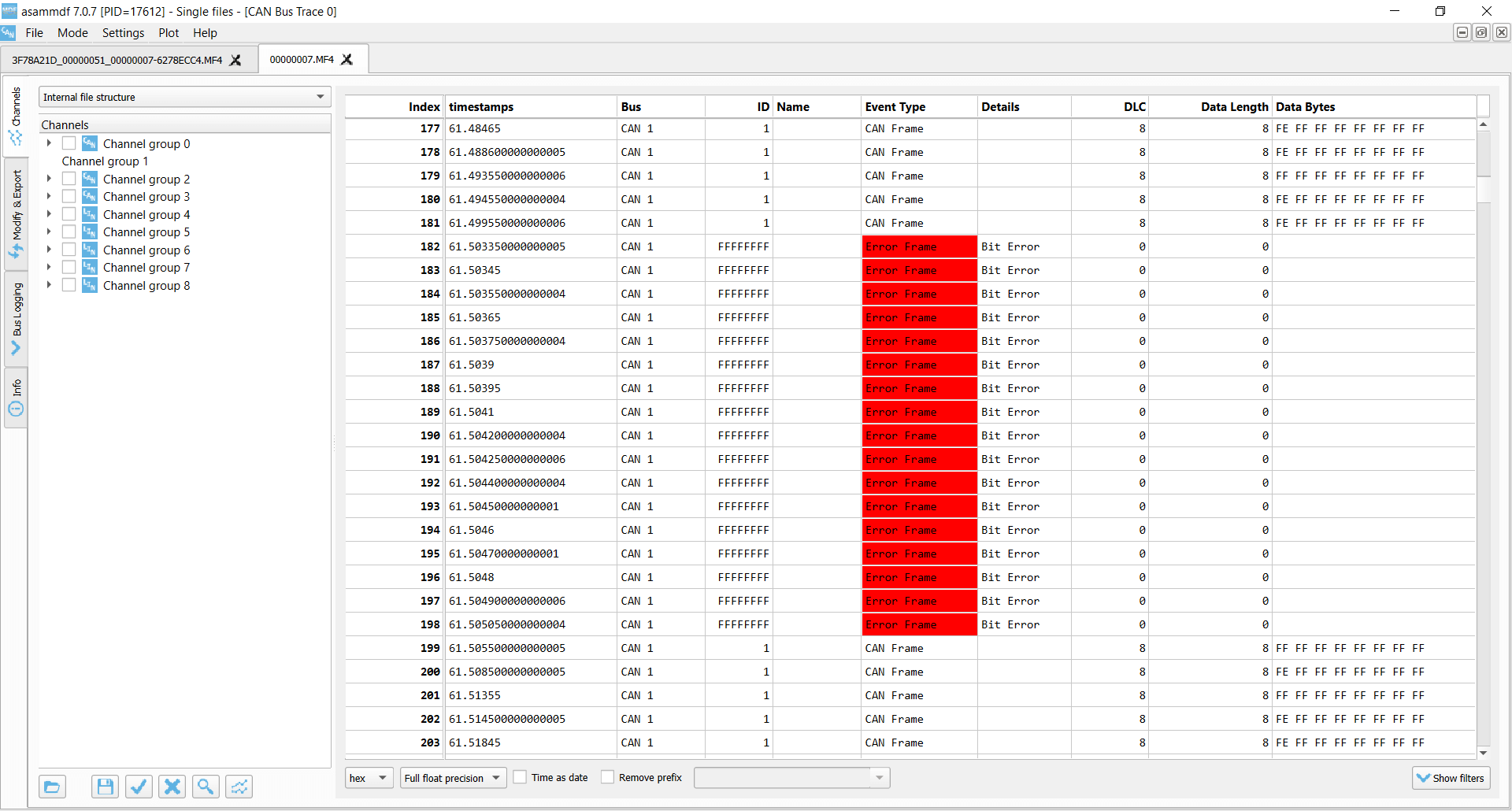
Test #1: No CAN bus errors
As a benchmark, we start with a test involving no CAN bus errors. Here, a CANedge2 ‘transmitter’ sends
data to another CANedge2 ‘receiver’ — and both log CAN bus errors.
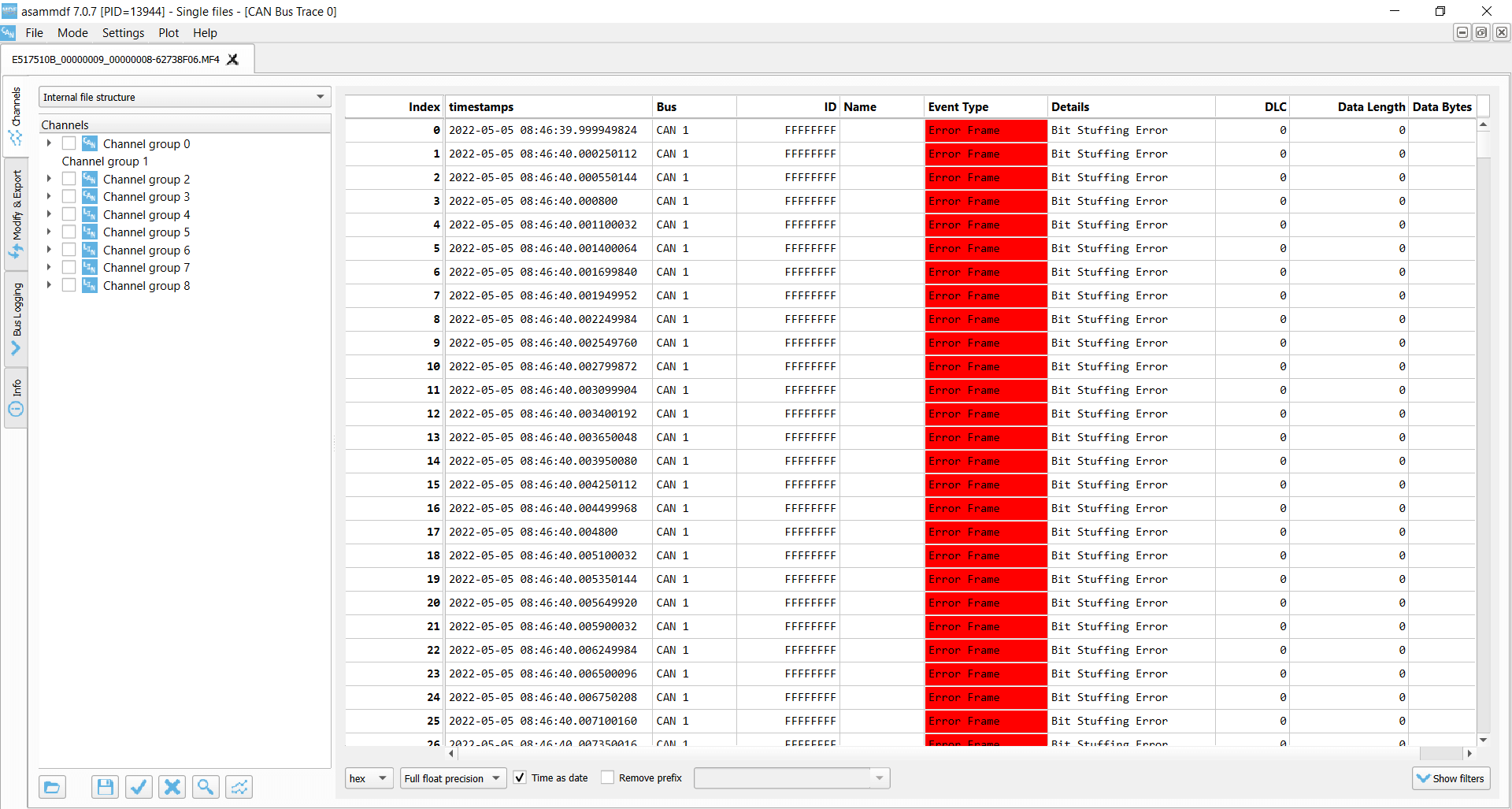
By loading the MF4 log
file in the asammdf GUI we
verify that no CAN errors occurred during this test, which is to be expected.


Test #2: Removing the CAN bus terminal resistor
In this test, we remove the CAN termination in the middle of a log session. This effectively corresponds to
immediately setting the bit level to dominant. As a result, the CANedge2 transmitter immediately starts
logging Bit Errors (which occur when it attempts to transmit a recessive bit, but reads a
dominant bit). The
CANedge2 Receiver logs Bit Stuffing Errors as it detects 6 consecutive dominant bits.
These errors are
recorded until the termination is added again.
Lack of termination is rarely a practical issue if you’re recording data from a vehicle, machine etc.
However, it’s a common issue when working with ‘test bench’ setups. Here, the lack of termination may
cause confusion as it can be difficult to distinguish from an inactive CAN bus. If in doubt, enabling
error frame logging on the CANedge can be useful in troubleshooting.

Transmitter Bit Errors

Receiver Bit Stuffing Errors
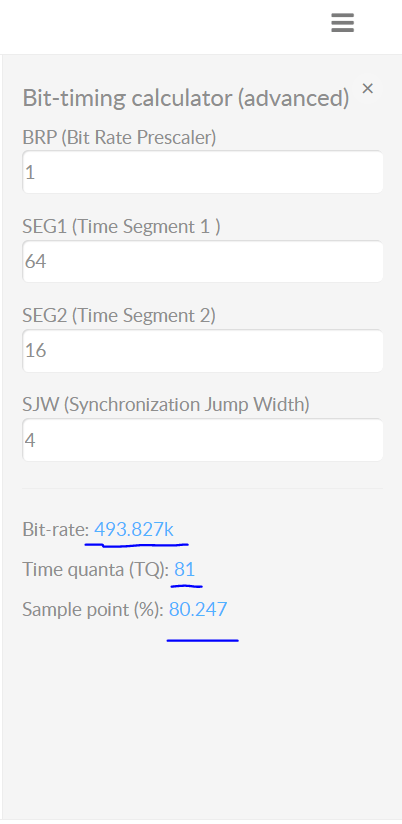
Test #3: Setting an incorrect baud rate
In this test we configure the CANedge receiver node to have a baud rate of 493.827K vs. the baud rate of the
transmitter of 500K. This is a fairly extreme difference and results in ACK Errors for the
transmitter and Bit
Stuffing Errors for the receiver.
In more realistic scenarios, smaller differences in the baud
rate
configuration of
various nodes may cause intermittent error frames and thus message loss.
This example is rather extreme. However, in practice we have sometimes seen CAN buses that use standard
bit rates
(250K, 500K, …), but with specific bit timing settings that differ from the ones that are typically
recommended
(and hence used by the CANedge). This will not lead to a complete shut-down of the communication, but
rather
periodic frame loss of a few percentages. To resolve this, you can construct an ‘advanced bit rate’ in
the
CANedge configuration, essentially setting up the bit-timing to better match the CAN bus you’re logging
from.

Transmitter ACK Error
Receiver Bit Stuffing Errors
Test #4: Removing the acknowledging CAN node
In this test, we use three CANedge units configured as follows:
-
CANedge1: Configured to
acknowledge data -
CANedge2 A:
Configured in ‘silent mode’ (no acknowledgement) -
CANedge2 B:
Configured to transmit a CAN frame every 500 ms
In the default setup, data is transmitted by the CANedge2 B onto the CAN bus and recorded with no errors.
However, if we remove the CANedge1 from the bus there are no longer any CAN nodes to acknowledge the frames
sent by the transmitter.
As a result, the transmitter detects ACK Errors. In response, it increases its
Transmit Error Counter and raises Active Error Flags onto the CAN bus. These are in turn
recorded by CANedge2 A (which silently monitors the bus) as Form Errors.
This is due to the fact that the transmitter raises them upon identifying the lack of a dominant
bit in the ACK slot. As soon as a dominant bit is observed by the receiver in the subsequent EOF field
(which should be recessive), a Form Error is detected.
As evident, the transmitter broadcasts 16 Active Error Flags as its TEC is increased from 0 to 16 x 8 =
128.
The transmitter has now exceeded the threshold of a TEC of 127 and enters Error Passive mode. As a
result,
the transmitter still experiences ACK Errors, but now only raises Passive Error Flags (not visible to
the
receiver). At this point, the transmitter keeps attempting to transmit the same frame — and the receiver
keeps recording this retransmission sequence.
This type of error is one we often encounter in our support tickets. Specifically, users may be trying to
use our CAN loggers to record data from a single CAN node (such as a sensor-to-CAN module like our
CANmod). If they decide to enable ‘silent mode’ on the CANedge in such an installation, no CAN nodes
will acknowledge the single CAN node broadcasting data — and the result will either be empty log files,
or log files filled with retransmissions of the same CAN frame (typically at very high frequency).


Transmitter ACK Errors

Receiver Form Errors
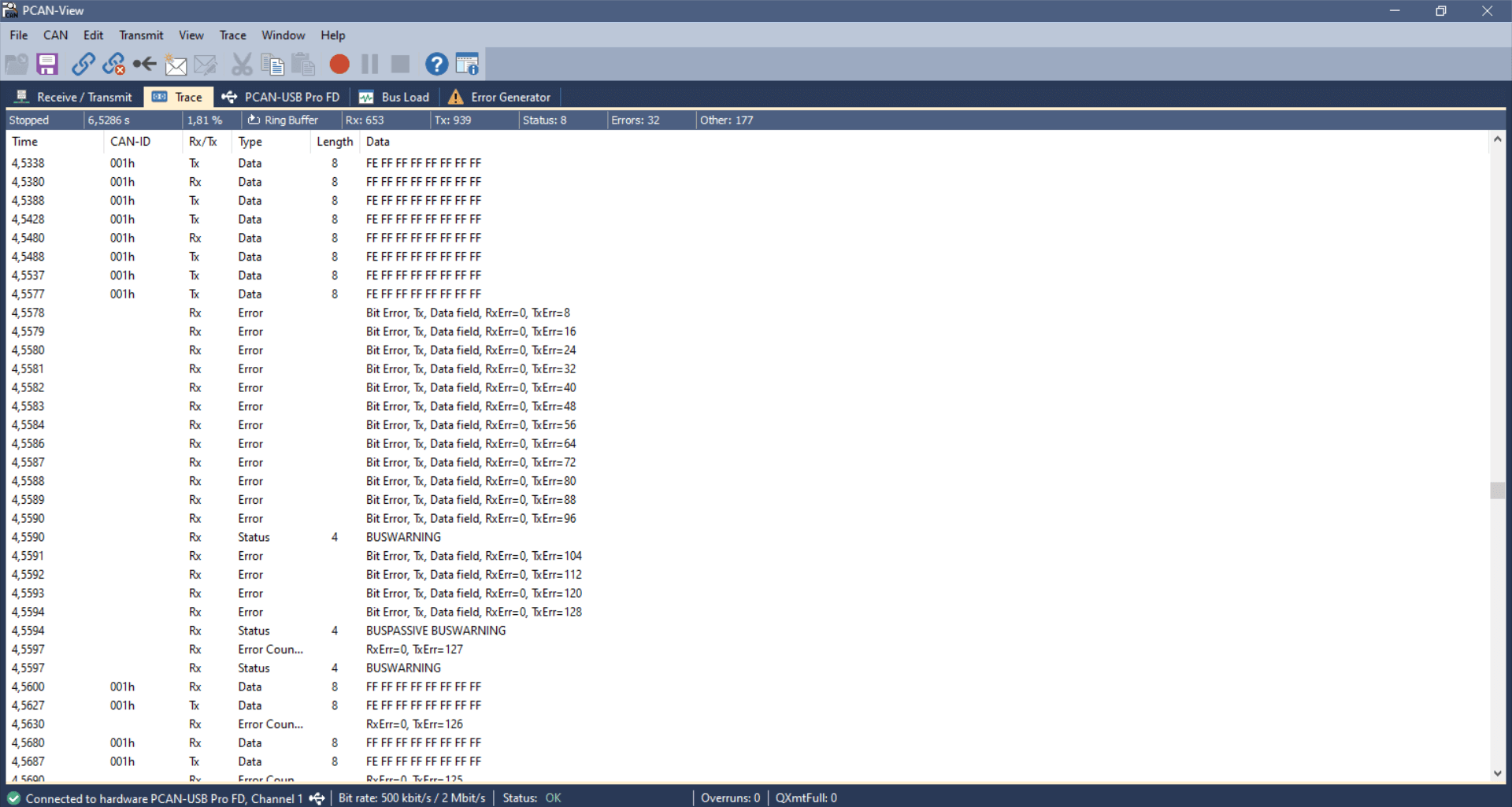
Test #5: CAN frame collisions (no retransmission)
When setting up a CAN bus, it is key to avoid overlapping CAN IDs. Failing to do so can result in frame
collisions
as two CAN nodes may both believe they’ve won the arbitration — and hence start transmitting their frames at
the same time.
To simulate this, we use the same setup as in test #4. In addition, we connect a PCAN-USB device as a
secondary
transmitter.
The CANedge2 transmitter is now configured to output a single CAN frame every 10 ms with CAN ID 1 and a
payload of
eight 0xFF bytes. Further, we configure the CANedge2 to disable retransmission of frames that were disrupted
by
errors. The PCAN-USB outputs an identical CAN frame every 2 ms with the 1st byte of the payload changed to
0xFE. The
PCAN device has retransmissions enabled.
This setup quickly creates a frame collision, resulting in the CANedge and PCAN transmitters detecting a
Bit
Error.
In response to this, both raise an Active Error Flag, which is detected as a Bit Stuffing
Error by the
CANedge
receiver. The PCAN device immediately attempts a retransmission and succeeds, while the CANedge waits with
further
transmission until the next message is to be sent.
This type of error should of course never happen in e.g. a car, since the design and test processes will
ensure
that all CAN nodes communicate via globally unique CAN identifiers. However, this problem can easily
occur if
you install a 3rd party device (e.g. a sensor-to-CAN module) to inject data into an existing CAN bus. If
you do
not ensure the global uniqueness of the CAN IDs of external CAN nodes, you may cause frame collisions
and hence
errors on the CAN bus. This is particularly important if your external CAN node broadcasts data with
high
priority CAN IDs as you may then affect safety critical CAN nodes.


USB-to-CAN transmitter Bit Error
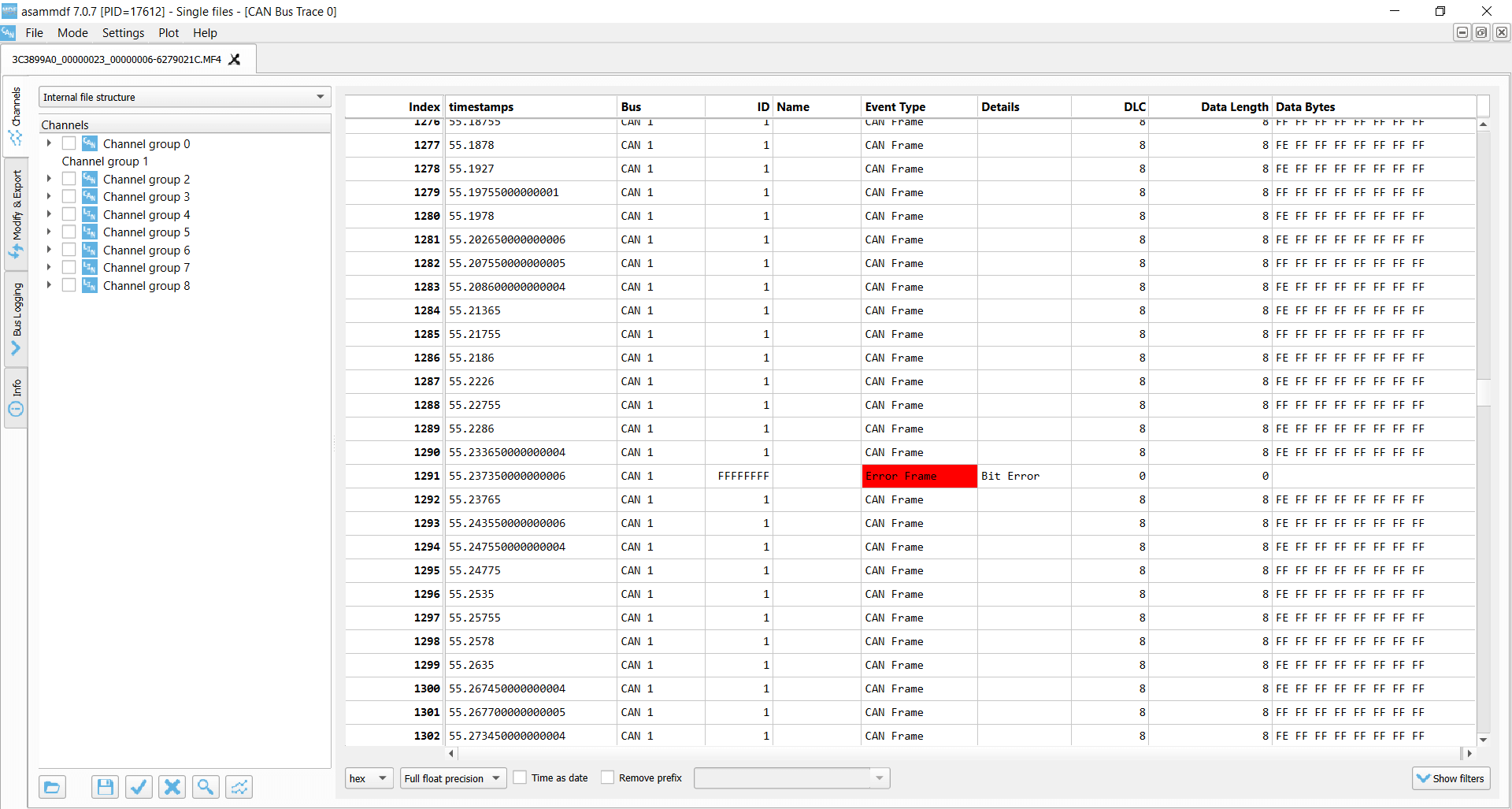
CANedge transmitter Bit Error
CANedge receiver Bit Stuffing Error
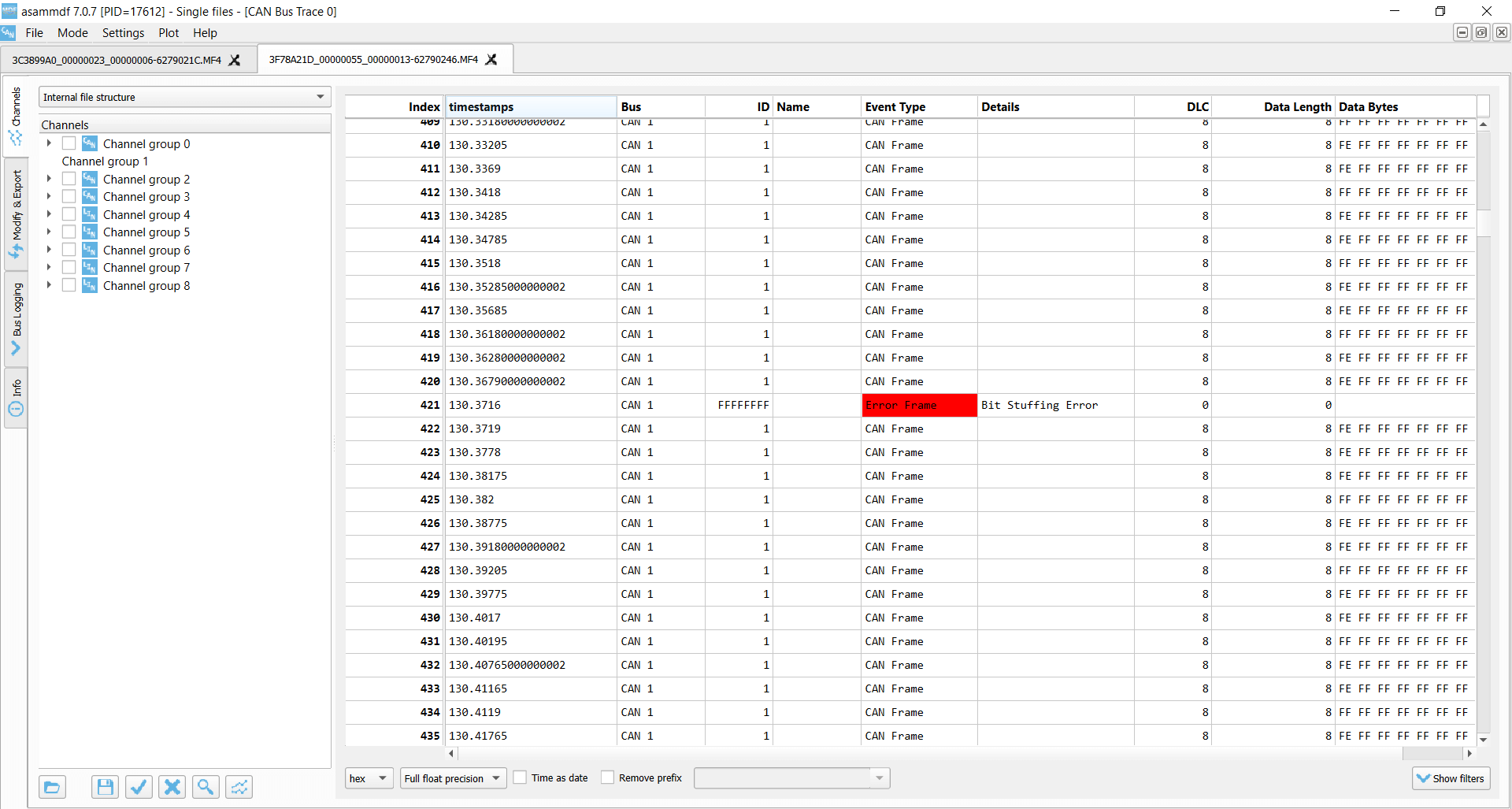
Test #6: CAN frame collisions (incl. retransmission)
In this test, we use the same setup as before, but we now enable retransmissions on the CANedge2 transmitter.
In this case, the frame collision results in a sequence of subsequent frame collisions as both the CANedge2
and the PCAN-USB device attempt to re-transmit their disrupted messages.
Due to the resulting Bit Errors, both raise a total of 16 Active Error Flags, which are detected as
Bit Stuffing Errors
by the silent CANedge2 receiver. Both transmitters then enter Error Passive mode and stop raising Active Error
Flags, meaning none of them can destroy CAN frames on the bus. As a result, one of the transmitters will
succeed in transmitting a full message, thus ending the retransmission frenzy — and enabling both devices to
resume transmission. However, this only lasts for a few seconds before another collision occurs.
The collision handling is a good example of how effective the CAN error handling is at ‘shutting down’
potentially
problematic sequences and enabling CAN nodes to resume communication. If a frame collision occurs, it is likely
that both CAN nodes will be set up to attempt retransmission, which would cause a jam if not for the error
handling and confinement.
USB-to-CAN transmitter Bit Errors x 16
CANedge transmitter Bit Errors x 16

CANedge receiver Bit Stuffing Errors x 16
Similar to CAN bus errors, the LIN protocol also specifies a set of four error types, which we outline briefly below.
The CANedge supports both CAN/LIN error frame logging.
As for the CAN CRC Error, this error type implies that a LIN node has calculated a different checksum vs. the one
embedded in the LIN bus frame by the transmitter. If you’re using the CANedge as a LIN Subscriber, this error
may indicate that you’ve configured the device ‘frame table’ with incorrect identifiers for some of the LIN
frames on the bus.
This can in turn be used to ‘reverse engineer’ the correct lengths and IDs of proprietary LIN frames via a
step-by-step procedure. See the CANedge Docs for details.
These occur if a specific part of the LIN message does not match the expected value, or if there is a mismatch
between what is transmitted vs. read on the LIN bus.
This error indicates an invalid synchronization field in the start of the LIN frame. It can also indicate a large
deviation between the configured bit rate for a LIN node vs. the bit rate detected from the synchronization
field.
Transmission errors can occur for LIN identifiers registered as SUBSCRIBER messages. If there are no nodes
responding to a SUBSCRIBER message, a transmission error is logged.
Example use cases for CAN error frame logging
CAN bus diagnostics in OEM prototype vehicles
An automotive OEM may have the need to record CAN error frames in the field during late stage prototype
testing. By deploying a CANedge, the OEM engineering team will both be able to troubleshoot issues based on
the actual CAN signals (speed, RPM, temperatures) — as well as issues related with the lower layer CAN
communication in their prototype systems. This is particularly vital if the issues of interest are
intermittent and e.g. only happen once or twice per month. In such scenarios, CAN bus interfaces are not
well suited — and it becomes increasingly relevant to have a cost-effective device to enable scalable
deployments for faster troubleshooting.


Remotely troubleshooting CAN errors in machinery
An OEM or aftermarket user may need to capture rare CAN error events in their machines. To do so, they deploy
a CANedge2 to record the CAN data and related error frames — and automatically upload the data via WiFi to
their own cloud server. Here, errors are automatically identified and an alert is sent to the engineering
team to immediately allow for diagnosing and resolving the issue.
FAQ
No, error frame logging is a highly specific functionality — and only relevant if you know that you need to
record this information. Typically, it’s mainly of value during diagnostics by OEM engineers — and less so for
aftermarket users. In addition, if systematic errors occur they can quickly bloat the log file size.
With the CANedge2 you can of course enable/disable error frame logging over-the-air.
Yes, the CANedge is able to record all CAN/LIN error types. It does, however, not currently record its own error
counter status as this is deemed less relevant from a logging perspective.
The CANedge is only able to raise error flags onto the CAN bus if it is configured in its ‘normal’ mode, in which
it is also able to transmit messages. If in ‘restricted’ mode it can listen to CAN frames and acknowledge CAN
frames — but not raise Active Error Flags onto the bus. In ‘monitoring’ mode (aka ‘silent mode’) it can listen
to the CAN bus traffic, but not acknowledge messages nor raise Active Error Flags.
The CANedge will always record internal CAN/LIN error frames.
If a CAN frame is erroneous, resulting in an error frame, the CANedge generally only records the error type —
without any data related to the erroneous frame (beyond the timestamp). One exception to this rule is for
acknowledgement errors, where the CANedge will still record unacknowledged CAN frames (incl. from retransmission
attempts).
Some researchers have pointed out the risk that ‘bad actors’ could utilize the CAN bus error handling
functionality to enforce remote ‘bus off’ events for safety-critical ECUs. This is a good example of why CAN bus
data loggers & interfaces like the CANedge2 with remote
over-the-air data transfer and updates need to be highly secure (see also our intro to CAN
cybersecurity). For a nice overview of a remote bus off attack, see this
intro by Adrian Colyer.
For more intros, see our guides section — or download the
‘Ultimate Guide’ PDF.
Need to log CAN bus data & errors?
Get your CAN logger today!
Recommended for you