
Ошибки в каналах
связи появляются в результате воздействия
различного рода случайных помех. Поэтому
последовательность ошибок является
случайной последовательностью, а ее
характеристики — случайными величинами.
Основной метод изучения последовательности
ошибок – статистический метод.
Сущность данного
метода заключается в том, что с помощью
специальных приборов производятся
исследования каналов различного типа.
В процессе исследований выявляются и
накапливаются последовательности
ошибок за длительный промежуток времени.
Обработка и обобщение полученных
статистических данных позволяют
установить и изучить закономерности
появления ошибок в каналах связи. Знание
этих закономерностей, в свою очередь,
позволяет научно обоснованно определять
наиболее эффективные меры борьбы с
ошибками.
Для получения
достоверных статистических результатов
объемы выборок последовательности
ошибок должны быть такими, чтобы они
охватывали все характерные состояния
канала. Опытным путем установлено, что
для получения достоверных статистических
данных каналы, образованные проводными,
радиорелейными и тропосферными линиями
связи, должны испытываться в течение
нескольких суток непрерывно, а
коротковолновые радиоканалы — по
нескольку суток в различное время года.
При этих условиях объем выборки может
достигать
![]()
и более элементов по каждому каналу.
Испытаниям подвергаются действующие
каналы в обычных условиях эксплуатации.
Первичные характеристики каналов должны
соответствовать установленным нормам
и периодически контролироваться в
процессе испытания.
Сущность общепринятого
метода выявления последовательности
ошибок в дискретном канале заключается
в следующем. На вход канала подается
испытательная двоичная последовательность
![]()
(испытательный текст). На выходе
дискретного канала из принятой
последовательности
![]()
поэлементно
вычитается
,
в результате чего образуется
последовательность ошибок
![]()
.
В том случае, когда необходимо выявить
лишь последовательность модулей ошибок
Е, на выходе дискретного канала
достаточно произвести поэлементное
сложение по модулю 2 последовательностей
и
:
+
=
Е.
Статистическая
структура испытательной последовательности
должна быть достаточно близка к структуре
передаваемой информации. Этому условию
удовлетворяют двоичные последовательности,
вырабатываемые генераторами
последовательности максимальной длины
( ГПМД). Благодаря этому, а также вследствие
простоты реализации ГПМД получили
наибольшее распространение в качестве
генераторов испытательной последовательности
.
В зависимости от
задач статистических измерений ошибки
могут непосредственно подсчитываться
с помощью счетчиков или записываться
на долговременный носитель для последующей
обработки.
3.4.3 Основные закономерности распределения ошибок в реальных каналах связи
A.
Характер распределения ошибок в реальных
каналах
Одним из основных
параметров последовательности ошибок
является частота появления ошибок pL.
Частость появления ошибок (или просто
частость ошибок) определяется как
отношение числа ошибок Мош =![]()
,
появившихся за определенный отрезок
времени t , к общему числу переданных
символов L:
![]()
При
достаточно большом L частость ошибок
сходится с вероятностью появления
ошибки (вероятность ошибки) p. Значения
p для различных типов каналов приведены
в таблице 3.1.
В
течение длительного времени, когда
отсутствовали статистические данные
реальных каналов связи, предполагалось,
что ошибки в каналах связи появляются
независимо. При таком распределении
ошибок значение i-го элемента
последовательности ошибок Е не зависит
от того, какое значение принимает любой
другой j-й элемент данной последовательности.
Пусть
Р{ei=1}=p, P{(ei=1)/(ej=1)} —
вероятность приема i-го элемента с
ошибкой (ei=1) при условии, что ошибка
произошла на j-м месте (ej=1), а
Р{(ei=1)/(ej=0)} — вероятность
приема i-го элемента с ошибкой при
условии, что j-й элемент принят правильно.
Ошибки появляются независимо, если
выполняется условие:
Р{(ei=1)/(ej=1)}=Р{(ei=1)/(ej=0)}=Р{ei=1}=p
В
противном случае появление ошибок
является зависимым событием.
При
независимых ошибках достаточно знать
значение единственного параметра р,
чтобы определить распределение любой
случайной величины. Для этого достаточно
воспользоваться схемой Бернулли. В
частности, вероятность появления в
n-элементной комбинации ровно i ошибок
P(i,n) определяется биномиальным
распределением:
![]()
( 0 ≤ i ≤ n
).
Вероятность
приема комбинации без ошибки P(0,n)=(1 —
p)n = qn . Следовательно,
вероятность появления искаженной
комбинации, т.е. комбинации, содержащей
хотя бы одну ошибку,
![]()
,
при np « 1, P(≥1,n) ≈ np.
Вероятность
появления m и более ошибок в комбинации
длины n:

.
Иногда
(при m<n/2) для вычисления P(≥m,n) удобнее
пользоваться формулой, полученной из
условия, что
![]()
:
![]()
.
Многочисленные
исследования реальных каналов связи
не подтвердили гипотезу о независимом
характере появления ошибок.
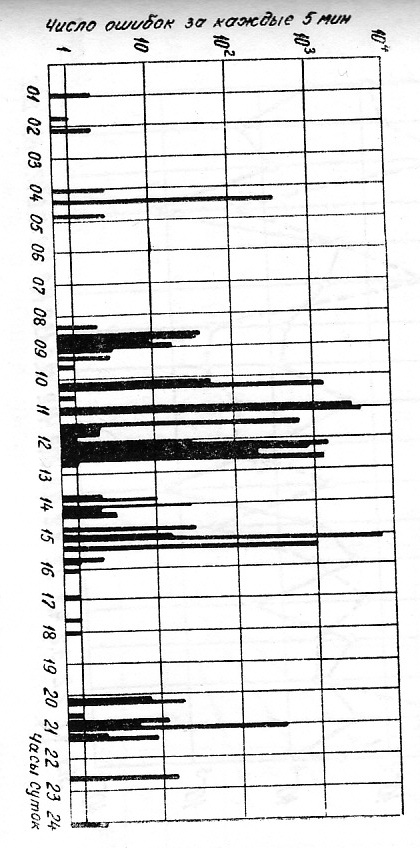
Рис.3.1
Данные исследования
показали, что ошибки появляются группами
(пачками). Частость ошибок во время
появления группы ошибок возрастает и
становится значительно больше вероятности
р. На рисунке 3.1 в
качестве примера, иллюстрирующего
групповой характер появления ошибок,
приведено абсолютное число ошибок,
появляющихся за каждые пять минут суток
в кабельном телефонном канале связи.
Это число определялось по результатам
испытания канала в течение шести суток.
Ошибки, как показано на рисунке 3.1
группируются в определенные промежутки
времени. В ночное время число ошибок в
подавляющем большинстве пятиминутных
сеансов равно нулю или меньше десяти.
В первой половине дня число ошибок за
пятиминутные интервалы редко бывает
равно нулю, а в большинстве превышает
сотни и тысячи ошибок. Испытания
проводились на скорости телеграфирования
N=1200 бод, поэтому L=5·60·1200=3.6·105
элементов. Частость ошибок pL в
ночное время колеблется в пределах
0÷3·10-5, а в дневное время — 0÷10-2.
Таким
образом, появление ошибок в реальных
каналах является зависимым событием,
поэтому схема Бернулли не применима.
Расчеты по формулам, полученным на
основе данной схемы, приводят к
значительным, а во многих важных для
практики случаях и недопустимым
погрешностям. Групповой характер
появления ошибок проявляется во всех
статистических характеристиках
последовательности ошибок. Поэтому для
математического описания этой
последовательности недостаточно знать
один параметр р, а необходимо определить
дополнительные параметры, учитывающие
степень зависимости появления ошибок
в реальных каналах.
Б.Зависимость вероятности появления
искаженной комбинации от длины
Статистическая
вероятность появления искаженной
комбинации определяется как отношение
числа искаженных комбинаций Bош(n)
к общему числу комбинаций B0(n),
т.е.
![]()
.
Вероятность Р(≥1,n)
является неубывающей функцией n. При
n=1 Р(≥1,n)=р, а при n→∞ вероятность P(≥1,n)
с ростом n зависит от характера
распределения ошибок.
На рис. 3.2 показана
функция P(≥1,n) в логарифмическом масштабе,
т.е. log P(≥1,n)=log
p + log n.
Это выражение является уравнением
прямой, пересекающейся с осью y
точке y=p
под углом β1. Так как угловой
коэффициент tgβ1=1,
то β1=π/4.
Для
гипотетического канала, у которого
часть последовательности ошибок e1=
e2=…= e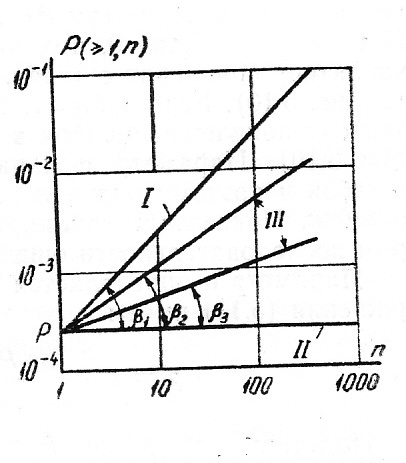
Мош=1,
а остальная часть eМош+1=
eМош+2=…= eL=0,
на интервале 1≤i≤Mош
частость ошибок рL1
= Mош / Mош
= 1, а на участке i > Mош
частость ошибок рL2=0.
Так как число искаженных комбинаций
длины n Bош(n)=Мош
/ n, а общее число
комбинаций B0 = L
/ n, то вероятность появления
искаженной комбинации:
![]()
.
Таким образом, для
канала, у которого ошибки появляются
плотной группой на одном из
временных
и
Рис.
3.2
нтервалов, вероятность появления
искаженной комбинации не зависит от
n и log
Р(≥1,n)=log p.
Это выражение представляет собой
уравнение прямой линии, параллельной
оси абсцисс, так как tg β
= 0 и β = 0 (прямая II
на рис.3.2). Эта прямая пересекается с
осью y в точке с ординатой,
равной р. Прямые I и II
на рис.3.2 являются границами (пределами)
зависимости Р(≥1,n) = f(n),
т.е. p ≤ Р(≥1,n) ≤ np.
Исследования
каналов показали, что для реальных
каналов зависимости log
Р(≥1,n) = f(log
n) достаточно хорошо
аппроксимируются прямыми линиями при
числе элементов в комбинации от 1 до
500. Прямые, соответствующие этим
зависимостям, находятся между указанными
выше границами и имеют угол наклона β
< β1 (прямые III на
рис.3.2 с углами наклона β2 и β3).
Такой характер зависимости Р(≥1,n) = f
(n) является следствием
группового характера появления ошибок
в реальных каналах. Для описания
зависимости Р(≥1,n) = f (n)
достаточно определить значение двух
параметров: вероятности ошибки р и
углового коэффициента tg
β. Обозначим tg
β = 1 – α, тогда
log
Р(≥1,n)
= log p + (1 — α) log n
или
Р(≥1,n) = n1-α
p .
Если α=0, то tg
β = 1, что соответствует независимому
появлению ошибок. При этом Р(≥1,n) = np
(прямая I на рис.3.16). Если
α = 1, то tg β = 0, что
соответствует предельно групповому
характеру появления ошибок в реальных
каналах (прямые III на
рис.3.2). Параметр α характеризует степень
группирования ошибок и поэтому получил
название показателя группирования
ошибок. Показатель группирования
является важным параметром последовательности
ошибок.
Параметр α
определяется по статистическим данным.
Из выражения для log Р(≥1,n)
имеем:
![]()
.
Подставив исходные
значения Р(≥1,n), после преобразования
получим:
![]()
.
Для
вычисления параметра α по статистическим
данным последовательность ошибок
разбивают на подпоследовательности
длиной n, определяют число
искаженных комбинаций Вош(n)
и вычисляют значение α. Однако вычисление
параметра α при одном значении n
может дать значительную погрешность,
так как значения Вош(n)
на конечной выборке могут иметь случайные
выбросы. Для более точного вычисления
параметра α вычисляют ρ значений α при
ρ значениях n. По полученным
значениям αi
определяют параметр α как среднее
значение αi, т.е.
![]()
Значения
n берутся из интервала,
где np«1.
При
ρ=5÷10 погрешность вычисления параметра
α становится несущественной.
Значения
параметра α для различных каналов связи
приведены в табл. 3.1
Таблица
3.1
|
Тип |
Значение ρ |
Значение |
||
|
макс. |
мин. |
макс. |
мин. |
|
|
Кабельные |
10-4 |
10-6 |
0.7 |
0.5 |
|
Радиорелейные |
10-3 |
10-4 |
0.5 |
0.3 |
|
КВ радиотелеграфные |
10-1 |
10-3 |
0.4 |
0.3 |
Наибольшее
значение α принимает для телефонных
кабельных каналов, потому что
кратковременные прерывания в различных
промежуточных пунктах кабельной
магистрали приводят к появлению групп
с большой плотностью ошибок.
Меньшее
значение α имеет для радиорелейных
телефонных каналов, так как в них, наряду
с участками большой плотности, наблюдаются
участки с редкими ошибками, появляющимися
за счет повышения уровня шумов.
В
КВ радиотелеграфных каналах вследствие
замирания сигнала и воздействия помех
обычно наблюдаются не только пачки
ошибок, но и одиночные ошибки. Поэтому
показатель группирования принимает,
как правило, наименьшие значения.
Для
каналов тонального телеграфирования
обычно параметр α имеет такое же значение,
что и для кабельных телефонных каналов,
так как причины возникновения ошибок
одни и те же.
В. Распределение
ошибок в комбинациях различной длины
При оценке
эффективности блоковых корректирующих
кодов интерес представляет не только
вероятность появления n-элементных
искаженных комбинаций P(≥1,n),
но и вероятности появления комбинаций
с одной P(1,n),
двумя P(2,n)
и m ошибками P(m,n).
Под
вероятностью появления комбинаций
длины n c m
ошибками будем понимать

.
Очевидно, что:
![]()
.
Кроме того, для
оценки эффективности некоторых
корректирующих кодов необходимо знать
суммарную (накопленную) вероятность
появления искаженных комбинаций с m
и более ошибками:
![]()
.
Статистическая
вероятность появления n-элементных
комбинаций с m и более
ошибками определяется как отношение
числа комбинаций с m и
боле ошибками к общему числу комбинаций:
,
где В(i,n)
– число n-элементных
комбинаций, содержащих i
ошибок; В0(n) =
![]()
— общее число переданных n-элементных
комбинаций.
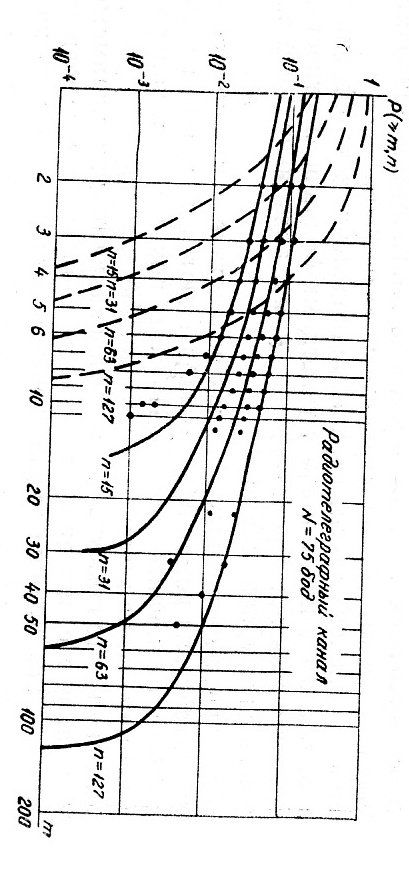
Рис.3.3
На рис. 3.3 в
логарифмическом масштабе показаны
графики Р(≥m,n) для
радиотелеграфного канала с параметрами
р = 1,37 · 10-2 и α = 0,4. Точками на этом
рисунке нанесены экспериментальные
значения Р(≥m,n), которые
на участке 1≤m≤n/3
достаточно хорошо аппроксимируются
прямыми линиями (сплошные линии).
Исследования зависимости Р(≥m,n)
= f(m) на
реальных каналах показали, что на участке
m<n/3 значения
Р(≥m,n) с ростом m
убывают медленно, что свидетельствует
о наличии искаженных комбинаций с
большим числом ошибок и является
следствием группового характера
появления ошибок в реальных. Скорость
убывания вероятности Р(≥m,n)
с ростом m различна для
различных каналов и определяется
степенью группирования ошибок. Достаточно
хорошая аппроксимация начальной части
зависимости log Р(≥m,n)
= f (log m)
прямыми линиями позволяет получить
приближенную формулу для вычисления
Р(≥m,n) при m<n/3
с использованием параметров p
и α:
![]()
На рис. 3.3 для
сравнения пунктирными линиями приведены
зависимости Р(≥m,n) =
f (m),
вычисленные для случая независимых
ошибок при том же значении р = 1.37
·10-2. В этом случае с увеличением
m вероятности Р(≥m,n)
уменьшаются значительно быстрее, чем
те же вероятности, полученные
экспериментально. Данный пример
показывает, что групповой характер
появления ошибок существенно влияет
на распределение их внутри комбинаций.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Корректирующие коды «на пальцах»
Время на прочтение
11 мин
Количество просмотров 63K
 Корректирующие (или помехоустойчивые) коды — это коды, которые могут обнаружить и, если повезёт, исправить ошибки, возникшие при передаче данных. Даже если вы ничего не слышали о них, то наверняка встречали аббревиатуру CRC в списке файлов в ZIP-архиве или даже надпись ECC на планке памяти. А кто-то, может быть, задумывался, как так получается, что если поцарапать DVD-диск, то данные всё равно считываются без ошибок. Конечно, если царапина не в сантиметр толщиной и не разрезала диск пополам.
Корректирующие (или помехоустойчивые) коды — это коды, которые могут обнаружить и, если повезёт, исправить ошибки, возникшие при передаче данных. Даже если вы ничего не слышали о них, то наверняка встречали аббревиатуру CRC в списке файлов в ZIP-архиве или даже надпись ECC на планке памяти. А кто-то, может быть, задумывался, как так получается, что если поцарапать DVD-диск, то данные всё равно считываются без ошибок. Конечно, если царапина не в сантиметр толщиной и не разрезала диск пополам.
Как нетрудно догадаться, ко всему этому причастны корректирующие коды. Собственно, ECC так и расшифровывается — «error-correcting code», то есть «код, исправляющий ошибки». А CRC — это один из алгоритмов, обнаруживающих ошибки в данных. Исправить он их не может, но часто это и не требуется.
Давайте же разберёмся, что это такое.
Для понимания статьи не нужны никакие специальные знания. Достаточно лишь понимать, что такое вектор и матрица, как они перемножаются и как с их помощью записать систему линейных уравнений.
Внимание! Много текста и мало картинок. Я постарался всё объяснить, но без карандаша и бумаги текст может показаться немного запутанным.
Каналы с ошибкой
Разберёмся сперва, откуда вообще берутся ошибки, которые мы собираемся исправлять. Перед нами стоит следующая задача. Нужно передать несколько блоков данных, каждый из которых кодируется цепочкой двоичных цифр. Получившаяся последовательность нулей и единиц передаётся через канал связи. Но так сложилось, что реальные каналы связи часто подвержены ошибкам. Вообще говоря, ошибки могут быть разных видов — может появиться лишняя цифра или какая-то пропасть. Но мы будем рассматривать только ситуации, когда в канале возможны лишь замены нуля на единицу и наоборот. Причём опять же для простоты будем считать такие замены равновероятными.
Ошибка — это маловероятное событие (а иначе зачем нам такой канал вообще, где одни ошибки?), а значит, вероятность двух ошибок меньше, а трёх уже совсем мала. Мы можем выбрать для себя некоторую приемлемую величину вероятности, очертив границу «это уж точно невозможно». Это позволит нам сказать, что в канале возможно не более, чем  ошибок. Это будет характеристикой канала связи.
ошибок. Это будет характеристикой канала связи.
Для простоты введём следующие обозначения. Пусть данные, которые мы хотим передавать, — это двоичные последовательности фиксированной длины. Чтобы не запутаться в нулях и единицах, будем иногда обозначать их заглавными латинскими буквами ( ,
,  ,
,  , …). Что именно передавать, в общем-то неважно, просто с буквами в первое время будет проще работать.
, …). Что именно передавать, в общем-то неважно, просто с буквами в первое время будет проще работать.
Кодирование и декодирование будем обозначать прямой стрелкой ( ), а передачу по каналу связи — волнистой стрелкой (
), а передачу по каналу связи — волнистой стрелкой ( ). Ошибки при передаче будем подчёркивать.
). Ошибки при передаче будем подчёркивать.
Например, пусть мы хотим передавать только сообщения  и
и  . В простейшем случае их можно закодировать нулём и единицей (сюрприз!):
. В простейшем случае их можно закодировать нулём и единицей (сюрприз!):

Передача по каналу, в котором возникла ошибка будет записана так:

Цепочки нулей и единиц, которыми мы кодируем буквы, будем называть кодовыми словами. В данном простом случае кодовые слова — это  и
и  .
.
Код с утроением
Давайте попробуем построить какой-то корректирующий код. Что мы обычно делаем, когда кто-то нас не расслышал? Повторяем дважды:

Правда, это нам не очень поможет. В самом деле, рассмотрим канал с одной возможной ошибкой:

Какие выводы мы можем сделать, когда получили  ? Понятно, что раз у нас не две одинаковые цифры, то была ошибка, но вот в каком разряде? Может, в первом, и была передана буква . А может, во втором, и была передана .
? Понятно, что раз у нас не две одинаковые цифры, то была ошибка, но вот в каком разряде? Может, в первом, и была передана буква . А может, во втором, и была передана .
То есть, получившийся код обнаруживает, но не исправляет ошибки. Ну, тоже неплохо, в общем-то. Но мы пойдём дальше и будем теперь утраивать цифры.

Проверим в деле:

Получили  . Тут у нас есть две возможности: либо это и было две ошибки (в крайних цифрах), либо это и была одна ошибка. Вообще, вероятность одной ошибки выше вероятности двух ошибок, так что самым правдоподобным будет предположение о том, что передавалась именно буква . Хотя правдоподобное — не значит истинное, поэтому рядом и стоит вопросительный знак.
. Тут у нас есть две возможности: либо это и было две ошибки (в крайних цифрах), либо это и была одна ошибка. Вообще, вероятность одной ошибки выше вероятности двух ошибок, так что самым правдоподобным будет предположение о том, что передавалась именно буква . Хотя правдоподобное — не значит истинное, поэтому рядом и стоит вопросительный знак.
Если в канале связи возможна максимум одна ошибка, то первое предположение о двух ошибках становится невозможным и остаётся только один вариант — передавалась буква .
Про такой код говорят, что он исправляет одну ошибку. Две он тоже обнаружит, но исправит уже неверно.
Это, конечно, самый простой код. Кодировать легко, да и декодировать тоже. Ноликов больше — значит передавался ноль, единичек — значит единица.
Если немного подумать, то можно предложить код исправляющий две ошибки. Это будет код, в котором мы повторяем одиночный бит 5 раз.
Расстояния между кодами
Рассмотрим поподробнее код с утроением. Итак, мы получили работающий код, который исправляет одиночную ошибку. Но за всё хорошее надо платить: он кодирует один бит тремя. Не очень-то и эффективно.
И вообще, почему этот код работает? Почему нужно именно утраивать для устранения одной ошибки? Наверняка это всё неспроста.
Давайте подумаем, как этот код работает. Интуитивно всё понятно. Нолики и единички — это две непохожие последовательности. Так как они достаточно длинные, то одиночная ошибка не сильно портит их вид.
Пусть мы передавали  , а получили
, а получили  . Видно, что эта цепочка больше похожа на исходные , чем на
. Видно, что эта цепочка больше похожа на исходные , чем на  . А так как других кодовых слов у нас нет, то и выбор очевиден.
. А так как других кодовых слов у нас нет, то и выбор очевиден.
Но что значит «больше похоже»? А всё просто! Чем больше символов у двух цепочек совпадает, тем больше их схожесть. Если почти все символы отличаются, то цепочки «далеки» друг от друга.
Можно ввести некоторую величину  , равную количеству различающихся цифр в соответствующих разрядах цепочек
, равную количеству различающихся цифр в соответствующих разрядах цепочек  и
и  . Эту величину называют расстоянием Хэмминга. Чем больше это расстояние, тем меньше похожи две цепочки.
. Эту величину называют расстоянием Хэмминга. Чем больше это расстояние, тем меньше похожи две цепочки.
Например,  , так как все цифры в соответствующих позициях равны, а вот
, так как все цифры в соответствующих позициях равны, а вот  .
.
Расстояние Хэмминга называют расстоянием неспроста. Ведь в самом деле, что такое расстояние? Это какая-то характеристика, указывающая на близость двух точек, и для которой верны утверждения:
- Расстояние между точками неотрицательно и равно нулю только, если точки совпадают.
- Расстояние в обе стороны одинаково.
- Путь через третью точку не короче, чем прямой путь.
Достаточно разумные требования.
Математически это можно записать так (нам это не пригодится, просто ради интереса посмотрим):

- .


 .
.Предлагаю читателю самому убедиться, что для расстояния Хэмминга эти свойства выполняются.
Окрестности
Таким образом, разные цепочки мы считаем точками в каком-то воображаемом пространстве, и теперь мы умеем находить расстояния между ними. Правда, если попытаться сколько нибудь длинные цепочки расставить на листе бумаги так, чтобы расстояния Хэмминга совпадали с расстояниями на плоскости, мы можем потерпеть неудачу. Но не нужно переживать. Всё же это особое пространство со своими законами. А слова вроде «расстояния» лишь помогают нам рассуждать.
Пойдём дальше. Раз мы заговорили о расстоянии, то можно ввести такое понятие как окрестность. Как известно, окрестность какой-то точки — это шар определённого радиуса с центром в ней. Шар? Какие ещё шары! Мы же о кодах говорим.
Но всё просто. Ведь что такое шар? Это множество всех точек, которые находятся от данной не дальше, чем некоторое расстояние, называемое радиусом. Точки у нас есть, расстояние у нас есть, теперь есть и шары.
Так, скажем, окрестность кодового слова радиуса 1 — это все коды, находящиеся на расстоянии не больше, чем 1 от него, то есть отличающиеся не больше, чем в одном разряде. То есть это коды:

Да, вот так странно выглядят шары в пространстве кодов.
А теперь посмотрите. Это же все возможные коды, которые мы получим в канале в одной ошибкой, если отправим ! Это следует прямо из определения окрестности. Ведь каждая ошибка заставляет цепочку измениться только в одном разряде, а значит удаляет её на расстояние 1 от исходного сообщения.
Аналогично, если в канале возможны две ошибки, то отправив некоторое сообщение  , мы получим один из кодов, который принадлежит окрестности радиусом 2.
, мы получим один из кодов, который принадлежит окрестности радиусом 2.
Тогда всю нашу систему декодирования можно построить так. Мы получаем какую-то цепочку нулей и единиц (точку в нашей новой терминологии) и смотрим, в окрестность какого кодового слова она попадает.
Сколько ошибок может исправить код?
Чтобы код мог исправлять больше ошибок, окрестности должны быть как можно шире. С другой стороны, они не должны пересекаться. Иначе если точка попадёт в область пересечения, непонятно будет, к какой окрестности её отнести.
В коде с удвоением между кодовыми словами  и
и  расстояние равно 2 (оба разряда различаются). А значит, если мы построим вокруг них шары радиуса 1, то они будут касаться. Это значит, точка касания будет принадлежать обоим шарам и непонятно будет, к какому из них её отнести.
расстояние равно 2 (оба разряда различаются). А значит, если мы построим вокруг них шары радиуса 1, то они будут касаться. Это значит, точка касания будет принадлежать обоим шарам и непонятно будет, к какому из них её отнести.
Именно это мы и получали. Мы видели, что есть ошибка, но не могли её исправить.
Что интересно, точек касания в нашем странном пространстве у шаров две — это коды и  . Расстояния от них до центров равны единице. Конечно же, в обычно геометрии такое невозможно, поэтому рисунки — это просто условность для более удобного рассуждения.
. Расстояния от них до центров равны единице. Конечно же, в обычно геометрии такое невозможно, поэтому рисунки — это просто условность для более удобного рассуждения.
В случае кода с утроением, между шарами будет зазор.

Минимальный зазор между шарами равен 1, так как у нас расстояния всегда целые (ну не могут же две цепочки отличаться в полутора разрядах).
В общем случае получаем следующее.
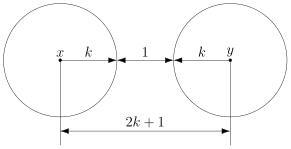
Этот очевидный результат на самом деле очень важен. Он означает, что код с минимальным кодовым расстоянием  будет успешно работать в канале с ошибками, если выполняется соотношение
будет успешно работать в канале с ошибками, если выполняется соотношение

Полученное равенство позволяет легко определить, сколько ошибок будет исправлять тот или иной код. А сколько код ошибок может обнаружить? Рассуждения такие же. Код обнаруживает ошибок, если в результате не получится другое кодовое слово. То есть, кодовые слова не должны находиться в окрестностях радиуса других кодовых слов. Математически это записывается так:

Рассмотрим пример. Пусть мы кодируем 4 буквы следующим образом.

Чтобы найти минимальное расстояние между различными кодовыми словами, построим таблицу попарных расстояний.
| A | B | C | D | |
|---|---|---|---|---|
| A | — | 3 | 3 | 4 |
| B | 3 | — | 4 | 3 |
| C | 3 | 4 | — | 3 |
| D | 4 | 3 | 3 | — |
Минимальное расстояние  , а значит
, а значит  , откуда получаем, что такой код может исправить до
, откуда получаем, что такой код может исправить до  ошибок. Обнаруживает же он две ошибки.
ошибок. Обнаруживает же он две ошибки.
Рассмотрим пример:

Чтобы декодировать полученное сообщение, посмотрим, к какому символу оно ближе всего.

Минимальное расстояние получилось для символа , значит вероятнее всего передавался именно он:

Итак, этот код исправляет одну ошибку, как и код с утроением. Но он более эффективен, так как в отличие от кода с утроением здесь кодируется уже 4 символа.
Таким образом, основная проблема при построении такого рода кодов — так расположить кодовые слова, чтобы они были как можно дальше друг от друга, и их было побольше.
Для декодирования можно было бы использовать таблицу, в которой указывались бы все возможные принимаемые сообщения, и кодовые слова, которым они соответствуют. Но такая таблица получилась бы очень большой. Даже для нашего маленького кода, который выдаёт 5 двоичных цифр, получилось бы  варианта возможных принимаемых сообщений. Для более сложных кодов таблица будет значительно больше.
варианта возможных принимаемых сообщений. Для более сложных кодов таблица будет значительно больше.
Попробуем придумать способ коррекции сообщения без таблиц. Мы всегда сможем найти полезное применение освободившейся памяти.
Интерлюдия: поле GF(2)
Для изложения дальнейшего материала нам потребуются матрицы. А при умножении матриц, как известно мы складываем и перемножаем числа. И тут есть проблема. Если с умножением всё более-менее хорошо, то как быть со сложением? Из-за того, что мы работаем только с одиночными двоичными цифрами, непонятно, как сложить 1 и 1, чтобы снова получилась одна двоичная цифра. Значит вместо классического сложения нужно использовать какое-то другое.
Введём операцию сложения как сложение по модулю 2 (хорошо известный программистам XOR):

Умножение будем выполнять как обычно. Эти операции на самом деле введены не абы как, а чтобы получилась система, которая в математике называется полем. Поле — это просто множество (в нашем случае из 0 и 1), на котором так определены сложение и умножение, чтобы основные алгебраические законы сохранялись. Например, чтобы основные идеи, касающиеся матриц и систем уравнений по-прежнему были верны. А вычитание и деление мы можем ввести как обратные операции.
Множество из двух элементов  с операциями, введёнными так, как мы это сделали, называется полем Галуа GF(2). GF — это Galois field, а 2 — количество элементов.
с операциями, введёнными так, как мы это сделали, называется полем Галуа GF(2). GF — это Galois field, а 2 — количество элементов.
У сложения есть несколько очень полезных свойств, которыми мы будем пользоваться в дальнейшем.

Это свойство прямо следует из определения.

А в этом можно убедиться, прибавив  к обеим частям равенства. Это свойство, в частности означает, что мы можем переносить в уравнении слагаемые в другую сторону без смены знака.
к обеим частям равенства. Это свойство, в частности означает, что мы можем переносить в уравнении слагаемые в другую сторону без смены знака.
Проверяем корректность
Вернёмся к коду с утроением.
Для начала просто решим задачу проверки, были ли вообще ошибки при передаче. Как видно, из самого кода, принятое сообщение будет кодовым словом только тогда, когда все три цифры равны между собой.
Пусть мы приняли вектор-строку из трёх цифр. (Стрелочки над векторами рисовать не будем, так как у нас почти всё — это вектора или матрицы.)

Математически равенство всех трёх цифр можно записать как систему:

Или, если воспользоваться свойствами сложения в GF(2), получаем

Или

В матричном виде эта система будет иметь вид

где

Транспонирование здесь нужно потому, что — это вектор-строка, а не вектор-столбец. Иначе мы не могли бы умножать его справа на матрицу.
Будем называть матрицу  проверочной матрицей. Если полученное сообщение — это корректное кодовое слово (то есть, ошибки при передаче не было), то произведение проверочной матрицы на это сообщение будет равно нулевому вектору.
проверочной матрицей. Если полученное сообщение — это корректное кодовое слово (то есть, ошибки при передаче не было), то произведение проверочной матрицы на это сообщение будет равно нулевому вектору.
Умножение на матрицу — это гораздо более эффективно, чем поиск в таблице, но у нас на самом деле есть ещё одна таблица — это таблица кодирования. Попробуем от неё избавиться.
Кодирование
Итак, у нас есть система для проверки
Её решения — это кодовые слова. Собственно, мы систему и строили на основе кодовых слов. Попробуем теперь решить обратную задачу. По системе (или, что то же самое, по матрице ) найдём кодовые слова.
Правда, для нашей системы мы уже знаем ответ, поэтому, чтобы было интересно, возьмём другую матрицу:

Соответствующая система имеет вид:

Чтобы найти кодовые слова соответствующего кода нужно её решить.
В силу линейности сумма двух решений системы тоже будет решением системы. Это легко доказать. Если  и
и  — решения системы, то для их суммы верно
— решения системы, то для их суммы верно

что означает, что она тоже — решение.
Поэтому если мы найдём все линейно независимые решения, то с их помощью можно получить вообще все решения системы. Для этого просто нужно найти их всевозможные суммы.
Выразим сперва все зависимые слагаемые. Их столько же, сколько и уравнений. Выражать надо так, чтобы справа были только независимые. Проще всего выразить  .
.
Если бы нам не так повезло с системой, то нужно было бы складывая уравнения между собой получить такую систему, чтобы какие-то три переменные встречались по одному разу. Ну, или воспользоваться методом Гаусса. Для GF(2) он тоже работает.
Итак, получаем:

Чтобы получить все линейно независимые решения, приравниваем каждую из зависимых переменных к единице по очереди.

Всевозможные суммы этих независимых решений (а именно они и будут кодовыми векторами) можно получить так:

где  равны либо нулю или единице. Так как таких коэффициентов два, то всего возможно
равны либо нулю или единице. Так как таких коэффициентов два, то всего возможно  сочетания.
сочетания.
Но посмотрите! Формула, которую мы только что получили — это же снова умножение матрицы на вектор.

Строчки здесь — линейно независимые решения, которые мы получили. Матрица  называется порождающей. Теперь вместо того, чтобы сами составлять таблицу кодирования, мы можем получать кодовые слова простым умножением на матрицу:
называется порождающей. Теперь вместо того, чтобы сами составлять таблицу кодирования, мы можем получать кодовые слова простым умножением на матрицу:

Найдём кодовые слова для этого кода. (Не забываем, что длина исходных сообщений должна быть равна 2 — это количество найденных решений.)

Итак, у нас есть готовый код, обнаруживающий ошибки. Проверим его в деле. Пусть мы хотим отправить 01 и у нас произошла ошибка при передаче. Обнаружит ли её код?

А раз в результате не нулевой вектор, значит код заподозрил неладное. Провести его не удалось. Ура, код работает!
Для кода с утроением, кстати, порождающая матрица выглядит очень просто:

Подобные коды, которые можно порождать и проверять матрицей называются линейными (бывают и нелинейные), и они очень широко применяются на практике. Реализовать их довольно легко, так как тут требуется только умножение на константную матрицу.
Ошибка по синдрому
Ну хорошо, мы построили код обнаруживающий ошибки. Но мы же хотим их исправлять!
Для начала введём такое понятие, как вектор ошибки. Это вектор, на который отличается принятое сообщение от кодового слова. Пусть мы получили сообщение , а было отправлено кодовое слово  . Тогда вектор ошибки по определению
. Тогда вектор ошибки по определению

Но в странном мире GF(2), где сложение и вычитание одинаковы, будут верны и соотношения:

В силу особенностей сложения, как читатель сам может легко убедиться, в векторе ошибки на позициях, где произошла ошибка будет единица, а на остальных ноль.
Как мы уже говорили раньше, если мы получили сообщение с ошибкой, то  . Но ведь векторов, не равных нулю много! Быть может то, какой именно ненулевой вектор мы получили, подскажет нам характер ошибки?
. Но ведь векторов, не равных нулю много! Быть может то, какой именно ненулевой вектор мы получили, подскажет нам характер ошибки?
Назовём результат умножения на проверочную матрицу синдромом:

И заметим следующее

Это означает, что для ошибки синдром будет таким же, как и для полученного сообщения.
Разложим все возможные сообщения, которые мы можем получить из канала связи, по кучкам в зависимости от синдрома. Тогда из последнего соотношения следует, что в каждой кучке будут вектора с одной и той же ошибкой. Причём вектор этой ошибки тоже будет в кучке. Вот только как его узнать?
А очень просто! Помните, мы говорили, что у нескольких ошибок вероятность ниже, чем у одной ошибки? Руководствуясь этим соображением, наиболее правдоподобным будет считать вектором ошибки тот вектор, у которого меньше всего единиц. Будем называть его лидером.
Давайте посмотрим, какие синдромы дают всевозможные 5-элементные векторы. Сразу сгруппируем их и подчеркнём лидеров — векторы с наименьшим числом единиц.
 |
|
|---|---|
|
 |
|
 |
|
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
 |
В принципе, для корректирования ошибки достаточно было бы хранить таблицу соответствия синдрома лидеру.
Обратите внимание, что в некоторых строчках два лидера. Это значит для для данного синдрома два паттерна ошибки равновероятны. Иными словами, код обнаружил две ошибки, но исправить их не может.
Лидеры для всех возможных одиночных ошибок находятся в отдельных строках, а значит код может исправить любую одиночную ошибку. Ну, что же… Попробуем в этом убедиться.

Вектор ошибки равен  , а значит ошибка в третьем разряде. Как мы и загадали.
, а значит ошибка в третьем разряде. Как мы и загадали.
Ура, всё работает!
Что же дальше?
Чтобы попрактиковаться, попробуйте повторить рассуждения для разных проверочных матриц. Например, для кода с утроением.
Логическим продолжением изложенного был бы рассказ о циклических кодах — чрезвычайно интересном подклассе линейных кодов, обладающим замечательными свойствами. Но тогда, боюсь, статья уж очень бы разрослась.
Если вас заинтересовали подробности, то можете почитать замечательную книжку Аршинова и Садовского «Коды и математика». Там изложено гораздо больше, чем представлено в этой статье. Если интересует математика кодирования — то поищите «Теория и практика кодов, контролирующих ошибки» Блейхута. А вообще, материалов по этой теме довольно много.
Надеюсь, когда снова будет свободное время, напишу продолжение, в котором расскажу про циклические коды и покажу пример программы для кодирования и декодирования. Если, конечно, почтенной публике это интересно.
Предположим, что в последовательности канала связи возможны случайные искажения отдельных знаков. Всюду далее в настоящей работе искажения в последовательности канала связи будем считать случайными. Целенаправленные искажения рассматривать не будем.
Искаженную последовательность будем обозначать
E’2M = {e’1,e’2,…,e’2M}, (3.3.1)
где
e’i = ei + δi (3.3.2)
В (3.3.2) δi – искажение, вносимое в последовательность канала связи в силу каких-либо внешних случайных причин.
Из искаженной последовательности канала связи (3.3.1) получаем искаженную последовательность открытого текста
B’2M = {b’1,b’2,…,b’2M} (3.3.3)
в которой
b’1 = e’1, b’2 = e’2 — π(e’1), b’i = e’i – (π(e’i-2 + e’i-1) — π(e’i-1)) (3.3.4)
Характерной особенностью закодированной последовательности является расстояние зависимости, означающее, что при раскодировании очередное значение bi раскодированного текста зависит только от трех значений в закодированном тексте: ei, ei-1 и ei-2. Таким образом, в случае наличия ошибки в i-м значении e’i закодированной последовательности эта ошибка при раскодировании может повлиять только на 3 значения при вычислении раскодированной последовательности:
b’i = e’i – (π(ei-2 + ei-1) — π(ei-1))
b’i+1 = ei+1 – (π(ei-1 + e’i) — π(e’i))
b’i+2 = ei+2 – (π(e’i + ei+1) — π(ei+1))
На все последующие значения раскодированного текста, начиная с bi+3, ошибка e’i не влияет.
Всюду далее в настоящей работе фраза «отсутствие иных искажений в пределах расстояния зависимости» для искаженного значения e’k = ek + δk, δk ≠ 0, будет означать, что выполняются два условия
1. e’k-2 = ek-2 и e’k-1 = ek-1,
2. e’k+2 = ek+2 и e’k+1 = ek+1,
т.е. искажений нет за два шага до, и за два шага после искаженного значения.
Пусть k – первое значение, при котором δk ≠ 0. Поскольку в этом случае
e’k-2 = ek-2 и e’k-1 = ek-1,
то из (3.3.4) следует, что в этом случае
b’k ≠ bk,
где bk – значение из декодированной неискаженной последовательности (3.2.5). Предположим, что k ϵ {3,4,…,2M}. Случай, когда k ϵ {1,2}, рассмотрим позже.
Рассмотрим далее способы выявления и исправления некоторых ошибок канала связи. Заметим, что единственным способом выявления ошибок будет наличие ненулевых значений на четных позициях при декодировке.
Следующая страница Предыдущая страница
Канальный уровень должен обнаруживать ошибки передачи данных, связанные с
искажением бит в принятом кадре данных или с потерей кадра, и по возможности их
корректировать.
Большая часть протоколов канального уровня выполняет только первую задачу —
обнаружение ошибок, считая, что корректировать ошибки, то есть повторно
передавать данные, содержавшие искаженную информацию, должны протоколы верхних
уровней. Так работают такие популярные протоколы локальных сетей, как Ethernet,
Token Ring, FDDI и другие. Однако существуют протоколы канального уровня, например
LLC2 или LAP-B, которые самостоятельно решают задачу восстановления искаженных
или потерянных кадров.
Очевидно, что протоколы должны работать наиболее эффективно в типичных
условиях работы сети. Поэтому для сетей, в которых искажения и потери кадров являются
очень редкими событиями, разрабатываются протоколы типа Ethernet, в которых не
предусматриваются процедуры устранения ошибок. Действительно, наличие процедур
восстановления данных потребовало бы от конечных узлов дополнительных
вычислительных затрат, которые в условиях надежной работы сети являлись бы
избыточными.
Напротив, если в сети искажения и потери случаются часто, то желательно уже
на канальном уровне использовать протокол с коррекцией ошибок, а не оставлять
эту работу протоколам верхних уровней. Протоколы верхних уровней, например
транспортного или прикладного, работая с большими тайм-аутами, восстановят
потерянные данные с большой задержкой. В глобальных сетях первых поколений,
например сетях Х.25, которые работали через ненадежные каналы связи, протоколы
канального уровня всегда выполняли процедуры восстановления потерянных и
искаженных кадров.
Поэтому нельзя считать, что один протокол лучше другого потому, что он
восстанавливает ошибочные кадры, а другой протокол — нет. Каждый протокол должен
работать в тех условиях, для которых он разработан.
Методы обнаружения ошибок
Все методы обнаружения ошибок основаны на передаче в составе кадра данных
служебной избыточной информации, по которой можно судить с некоторой степенью
вероятности о достоверности принятых данных. Эту служебную информацию принято
называть контрольной суммой или (последовательностью
контроля кадра — Frame Check Sequence, FCS). Контрольная сумма вычисляется
как функция от основной информации, причем необязательно только путем суммирования.
Принимающая сторона повторно вычисляет контрольную сумму кадра по известному
алгоритму и в случае ее совпадения с контрольной суммой, вычисленной передающей
стороной, делает вывод о том, что данные были переданы через сеть корректно.
Существует несколько распространенных алгоритмов вычисления контрольной
суммы, отличающихся вычислительной сложностью и способностью обнаруживать
ошибки в данных.
Контроль по паритету представляет собой наиболее простой метод контроля данных. В то же
время это наименее мощный алгоритм контроля, так как с его помощью можно
обнаружить только одиночные ошибки в проверяемых данных. Метод заключается в
суммировании по модулю 2 всех бит контролируемой информации. Например, для
данных 100101011 результатом контрольного суммирования будет значение 1.
Результат суммирования также представляет собой один бит данных, который
пересылается вместе с контролируемой информацией. При искажении при пересылке
любого одного бита исходных данных (или контрольного разряда) результат суммирования
будет отличаться от принятого контрольного разряда, что говорит об ошибке.
Однако двойная ошибка, например 110101010, будет неверно принята за корректные
данные. Поэтому контроль по паритету применяется к небольшим порциям данных,
как правило, к каждому байту, что дает коэффициент избыточности для этого
метода 1/8. Метод редко применяется в вычислительных сетях из-за его большой
избыточности и невысоких диагностических способностей.
Вертикальный и горизонтальный контроль по паритету представляет собой модификацию
описанного выше метода. Его отличие состоит в том, что исходные данные
рассматриваются в виде матрицы, строки которой составляют байты данных.
Контрольный разряд подсчитывается отдельно для каждой строки и для каждого
столбца матрицы. Этот метод обнаруживает большую часть двойных ошибок, однако
обладает еще большей избыточностью. На практике сейчас также почти не
применяется.
Циклический избыточный контроль (Cyclic Redundancy Check, CRC) является в настоящее время наиболее
популярным методом контроля в вычислительных сетях (и не только в сетях,
например, этот метод широко применяется при записи данных на диски и дискеты).
Метод основан на рассмотрении исходных данных в виде одного многоразрядного
двоичного числа. Например, кадр стандарта Ethernet, состоящий из 1024 байт,
будет рассматриваться как одно число, состоящее из 8192 бит. В качестве
контрольной информации рассматривается остаток от деления этого числа на
известный делитель R. Обычно в качестве делителя выбирается семнадцати- или тридцати
трехразрядное число, чтобы остаток от деления имел длину 16 разрядов (2 байт)
или 32 разряда (4 байт). При получении кадра данных снова вычисляется остаток
от деления на тот же делитель R, но при этом к данным кадра добавляется и
содержащаяся в нем контрольная сумма. Если остаток от деления на R равен нулю1 (1 Существуетнесколько
модифицированная процедура вычисления остатка, приводящая к получению в случае
отсутствия ошибок известного ненулевого остатка, что является более надежным
показателем корректности.), то делается вывод об отсутствии ошибок в полученном
кадре, в противном случае кадр считается искаженным.
Этот метод обладает более высокой вычислительной сложностью, но его
диагностические возможности гораздо выше, чем у методов контроля по паритету.
Метод CRC обнаруживает все одиночные ошибки, двойные ошибки и ошибки в нечетном
числе бит. Метод обладает также невысокой степенью избыточности. Например, для
кадра Ethernet размером в 1024 байт контрольная информация длиной в 4 байт
составляет только 0,4 %.
Методы восстановления искаженных и потерянных кадров
Методы коррекции ошибок в вычислительных сетях основаны на повторной
передаче кадра данных в том случае, если кадр теряется и не доходит до адресата
или приемник обнаружил в нем искажение информации. Чтобы убедиться в
необходимости повторной передачи данных, отправитель нумерует отправляемые
кадры и для каждого кадра ожидает от приемника так называемой положительной
квитанции — служебного кадра, извещающего о том, что исходный кадр был
получен и данные в нем оказались корректными. Время этого ожидания ограничено —
при отправке каждого кадра передатчик запускает таймер, и, если по его
истечении положительная квитанция на получена, кадр считается утерянным.
Приемник в случае получения кадра с искаженными данными может отправить отрицательную
квитанцию — явное указание на то, что данный кадр нужно передать
повторно.
Существуют два подхода к организации процесса обмена квитанциями: с
простоями и с организацией «окна».
Метод с простоями (Idle Source) требует, чтобы источник, пославший кадр, ожидал получения квитанции
(положительной или отрицательной) от приемника и только после этого посылал
следующий кадр (или повторял искаженный). Если же квитанция не приходит в
течение тайм-аута, то кадр (или квитанция) считается утерянным и его передача
повторяется. На рис. 2.24, а видно, что в этом случае производительность обмена
данными существенно снижается, — хотя передатчик и мог бы послать следующий
кадр сразу же после отправки предыдущего, он обязан ждать прихода квитанции.
Снижение производительности этого метода коррекции особенно заметно на
низкоскоростных каналах связи, то есть в территориальных сетях.

Рис. 2.24. Методы восстановления искаженных и
потерянных кадров
Второй метод называется методом «скользящего окна» (sliding
window). В этом методе для повышения коэффициента использования линии
источнику разрешается передать некоторое количество кадров в непрерывном
режиме, то есть в максимально возможном для источника темпе, без получения на
эти кадры положительных ответных квитанций. (Далее, где это не искажает
существо рассматриваемого вопроса, положительные квитанции для краткости будут
называться просто «квитанциями».) Количество кадров, которые разрешается
передавать таким образом, называется размером окна. Рисунок 2.24, б
иллюстрирует данный метод для окна размером в W кадров.
В начальный момент, когда еще не послано ни одного кадра, окно определяет
диапазон кадров с номерами от 1 до W включительно. Источник начинает передавать
кадры и получать в ответ квитанции. Для простоты предположим, что квитанции
поступают в той же последовательности, что и кадры, которым они соответствуют.
В момент t1 при получении первой квитанции К1 окно сдвигается
на одну позицию, определяя новый диапазон от 2 до (W+1).
Процессы отправки кадров и получения квитанций идут достаточно независимо
друг от друга. Рассмотрим произвольный момент времени tn, когда источник
получил квитанцию на кадр с номером n. Окно сдвинулось вправо и определило
диапазон разрешенных к передаче кадров от (n+1) до (W+n). Все множество кадров,
выходящих из источника, можно разделить на перечисленные ниже группы (рис.
2.24, б).
- Кадры с номерами от 1 доп. уже были отправлены и квитанции на них
получены, то есть они находятся за пределами окна слева. - Кадры, начиная с номера (п+1) и кончая номером
(W+n), находятся в пределах окна и
потому могут быть отправлены не дожидаясь прихода какой-либо квитанции.
Этот диапазон может быть разделен еще на два поддиапазона: - кадры с номерами от (n+1) до
т, которые уже отправлены, но квитанции на них еще не получены; - кадры с номерами от m до
(W+n), которые пока не отправлены, хотя запрета на это нет. - Все кадры с номерами, большими или равными
(W+n+1), находятся за пределами окна
справа и поэтому пока не могут быть отправлены.
Перемещение окна вдоль последовательности номеров кадров показано на рис.
2.24, в. Здесь t0 — исходный момент, t1 и tn —
моменты прихода квитанций на первый и n-й кадр соответственно. Каждый раз,
когда приходит квитанция, окно сдвигается влево, но его размер при этом не
меняется и остается равным W. Заметим, что хотя в данном примере размер окна в
процессе передачи остается постоянным, в реальных протоколах (например, TCP)
можно встретить варианты данного алгоритма с изменяющимся размером окна.
Итак, при отправке кадра с номером n источнику разрешается передать еще W-1
кадров до получения квитанции на кадр n, так что в сеть последним уйдет кадр с
номером (W+n-1). Если же за это время квитанция на кадр n так и не пришла, то
процесс передачи приостанавливается, и по истечении некоторого тайм-аута кадр n
(или квитанция на него) считается утерянным, и он передается снова.
Если же поток квитанций поступает более-менее регулярно, в пределах допуска
в W кадров, то скорость обмена достигает максимально возможной величины для
данного канала и принятого протокола.
Метод скользящего окна более сложен в реализации, чем метод с простоями,
так как передатчик должен хранить в буфере все кадры, на которые пока не
получены положительные квитанции. Кроме того, требуется отслеживать несколько
параметров алгоритма: размер окна W, номер кадра, на который получена
квитанция, номер кадра, который еще можно передать до получения новой
квитанции.
Приемник может не посылать квитанции на каждый принятый корректный кадр.
Если несколько кадров пришли почти одновременно, то приемник может послать
квитанцию только на последний кадр. При этом подразумевается, что все
предыдущие кадры также дошли благополучно.
Некоторые методы используют отрицательные квитанции. Отрицательные
квитанции бывают двух типов — групповые и избирательные. Групповая квитанция
содержит номер кадра, начиная с которого нужно повторить передачу всех кадров,
отправленных передатчиком в сеть. Избирательная отрицательная квитанция требует
повторной передачи только одного кадра.
Метод скользящего окна реализован во многих протоколах: LLC2, LAP-B, X.25,
TCP, Novell NCP Burst Mode.
Метод с простоями является частным случаем метода скользящего окна, когда
размер окна равен единице.
Метод скользящего окна имеет два параметра, которые могут заметно влиять на
эффективность передачи данных между передатчиком и приемником, — размер окна и
величина тайм-аута ожидания квитанции. В надежных сетях, когда кадры искажаются
и теряются редко, для повышения скорости обмена данными размер окна нужно
увеличивать, так как при этом передатчик будет посылать кадры с меньшими
паузами. В ненадежных сетях размер окна следует уменьшать, так как при частых
потерях и искажениях кадров резко возрастает объем вторично передаваемых через
сеть кадров, а значит, пропускная способность сети будет расходоваться во
многом вхолостую — полезная пропускная способность сети будет падать.
Выбор тайм-аута зависит не от надежности сети, а от задержек передачи
кадров сетью.
Во многих реализациях метода скользящего окна величина окна и тайм-аут
выбираются адаптивно, в зависимости от текущего состояния сети.
В предыдущей лекции мы выяснили, что на
физическом уровне происходит
непосредственно передача битов по
проводам. Однако реальная линия связи
состоит не только из кабеля, но еще
включает дополнительное оборудование:
маршрутизаторы, коммутаторы и т.п. Это
оборудование помогает управлять
передачей информации в сети определенной
топологии от компьютера к компьютеру.
Задачей качественного, быстрого и
надежного установления соединения
компьютеров с помощью такого рода
оборудования и занимается канальный
уровень.
Рассматривая
модель OSI, мы выяснили, что канальный
уровень оперирует кадрамиданных,
поскольку работает с компьютерами,
которые не обмениваются информацией
по битно. Кадры образуются определенным
набором бит данных. Они содержат в себе,
как минимум, адрес получателя, и
отправляются узлом-источником для
передачи по кабелю методами физического
уровня, затем оборудование сети, в
зависимости от ее топологии, распознает
— кому эти кадры предназначены, и
отправляет их по кабелю к узлу-приемнику.
Таким образом, канальный уровень — это
по сути логика установки соединений в
сети. С одной стороны он привязан к
физическому уровню, то есть к типам
используемых линий связи и методам
передач физического уровня. Но с другой
стороны он связан с сетевым уровнем,
который уже управляет передачей
информации между локальными сетями.
На
канальном уровне для каждой топологии
сети имеются свои правила работы —
протоколы. Если на физическом уровне
не решаются вопросы какой компьютер и
когда может использовать кабель линии
связи, то на канальном уровне важно
обеспечить качественную доставку кадра
от узла к узлу. Именно на канальном
уровне происходит «борьба за кабель»,за доставку информации к нужному узлу
сети, он занимается проблемами
взаимодействия станций друг с другом,
обеспечением гарантии доставки кадра
информации к станции в любой из
используемой топологии сети.
В этой
лекции мы поговорим в общем плане о
форматах кадров, рассмотрим способы
передачи данных на канальном уровне,
методы управления обменом информации
в сети с определенной топологией и т.д.
6.1. Структура типичного кадра компьютерной
сети.
Информация
в локальных сетях предается отдельными
порциями, называемыми в различных
источниках кадрами, пакетами илиблоками. Использование кадров
связано с тем, что в сети одновременно
может происходить несколько сеансов
связи, т.е. в течении одного и того
интервала времени могут идти два или
больше процессов передачи данных между
абонентами. Кадры (пакеты) собственно
и позволяют разделить во времени сеть
между передающими абонентами и уравнять
в правах доступа всех абонентов и
обеспечить для всех абонентов интегральную
скорость передачи информации. Длина
кадра зависит от типа сети и составляет
от 10 байт – до 10 Кбайт. Важно делить
информацию на кадры и для контроля
правильности передачи информации. Кадры
имеют преимущества пред побайтовой
(8бит) или пословной (16 бит и 32 бита)
передачей, т.к. при этом уменьшается
количество служебной информации и
увеличивается полезная загрузка сети.
Структура
кадра определяется аппаратурными
особенностями данной сети, выбранной
топологией и типом среды передачи
информации, а также существенно зависит
от используемого протокола (порядка
обмена информацией).
Типичный
кадр содержит в себе следующие основные
поля:
-
стартовая
комбинацияили преамбула — обеспечивает
настройку аппаратуры адаптера на прием
и обработку кадров, может отсутствовать
или сводится к одному стартовому биту; -
сетевой
адрес(идентификатор) принимающего
абонента — индивидуальный или групповой
номер, присвоенный принимающему абоненту
в сети, позволяющему приемнику распознать
кадр, адресованный ему лично, группе,
или всем абонентам сети; -
сетевой
адрес(идентификатор) предающего
абонента — индивидуальный или групповой
номер, присвоенный передающему абоненту,
информирует принимающего абонента,
откуда пришел данный кадр, включение
в кадр этого идентификатора необходимо,
если приемнику могут попеременно
приходить кадры от разных передатчиков; -
служебная
информация— указывает на тип кадра,
его номер, размер, формат, маршрут
доставки и т.д.; -
данные— собственно предаваемая информация.
Существуют управляющие кадры (сетевые
команды – начало и конец связи,
подтверждение приема кадра и т.д.), в
которых это поле отсутствует и
информационные – поле данных имеется; -
контрольная
суммакадра — числовой код, формируемый
передатчиком по определенным правилам
и содержащий в свернутом виде информацию
обо всем кадре, используется для проверки
правильности передачи кадра на приемном
конце. Приемник повторяя вычисления
сделанные передатчиком сравнивает
результат с контрольной суммой и делает
вывод о правильности или ошибочности
передачи кадра. -
стоповая
комбинация— информирует принимающего
абонента об окончании кадра, обеспечивает
выход аппаратуры из состояния приема.
Поле может отсутствовать, если
используется самосинхронизирующийся
код, позволяющий детектировать факт
передачи кадра.

Рис. 6.1. Структура пакета
1,2,3,4 —
образуют начальное управляющее поле,
5 — поле данных, 6,7- конечное управляющее
поле.
-
Передача
кадров на канальном уровне
При
передаче кадров данных на канальном
уровне используются как дейтаграммные
процедуры, работающие без становления
соединения(connectionless), так и процедурыс предварительным установлением
логического соединения (connection-oriented).
При дейтаграммной передаче кадр
посылается в сеть «без предупреждения»,
и никакой ответственности за его утерю
протокол не несет. Предполагается, что
сеть всегда готова принять кадр от
конечного узла. Дейтаграммный метод
работает быстро, так как никаких
предварительных действий перед отправкой
данных не выполняется. Однако при таком
методе трудно организовать в рамках
протокола отслеживание факта доставки
кадра узлу назначения. Этот метод не
гарантирует доставку пакета.
Передача с установлением соединения
более надежна, но требует больше времени
для передачи данных и вычислительных
затрат от конечных узлов. В этом случае
узлу-получателю отправляется служебный
кадр специального формата с предложением
установить соединение. Если узел-получатель
согласен с этим, то он посылает в ответ
другой служебный кадр, подтверждающий
установление соединения и предлагающий
для данного логического соединения
некоторые параметры, например идентификатор
соединения,максимальное значение
поля данных кадров, которые будут
использоваться в рамках данного
соединения, и т. п. Узел-инициатор
соединения может завершить процесс
установления соединения отправкой
третьего служебного кадра, в котором
сообщит, что предложенные параметры
ему подходят. На этом логическое
соединение считается установленным, и
в его рамках можно передавать информационные
кадры с пользовательскими данными.

Рис 6.2 Пример обмена кадрами при сеансе
связи
После
передачи некоторого законченного набора
данных, например определенного файла,
узел инициирует разрыв данного логического
соединения, посылая соответствующий
служебный кадр.
Заметим,
что, в отличие от протоколов дейтаграммного
типа, которые поддерживают только один
тип кадра — информационный, протоколы,
работающие по процедуре с установлением
соединения, должны поддерживать несколько
типов кадров — служебные, для установления
(и разрыва) соединения, и информационные,
переносящие собственно пользовательские
данные.
В общем
случае логическое соединение обеспечивает
передачу данных как в одном направлении
— от инициатора соединения, так и в обоих
направлениях.
6.3.Методы гарантии
доставки кадров информации
При
установке соединения не маловажным
вопросом становится обеспечение гарантии
доставки кадра и обнаружение ошибок.
Рассмотрим
общие подходы решению проблемы гарантии
доставки кадров. Для того, чтобы
гарантировать доставку всех кадров,
надо обеспечить такой режим установки
соединения, при котором можно было бы
в любой момент времени повторить
отосланный ранее кадр, в случае обнаружения
его потери или искажения. Чтобы убедиться
в необходимости повторной передачи
данных, отправитель нумерует отправляемые
кадры и для каждого кадра ожидает от
приемника так называемой положительной
квитанции— служебного кадра, извещающего
о том, что исходный кадр был получен и
данные в нем оказались корректными.
Время этого ожидания ограничено — при
отправке каждого кадра передатчик
запускает таймер, и, если по его истечении
положительная квитанция не получена,
кадр считается утерянным.
Приемник
в случае получения кадра с искаженными
данными может отправить отрицательную
квитанцию — явное указание на то, что
данный кадр нужно передать повторно.
В итоге,
путем обмена такого рода квитанциями,
можно определить есть ли утечки информации
в сети, и не просто определить, а обеспечить
ее повторную передачу в случае каких-либо
сбоев. Таким образом, канальный уровень
обеспечивает гарантированную доставку
кадров.
Организацией процесса обмена квитанциями
занимается метод скользящего окна.
Перед тем как рассмотреть этот, сначала
познакомится с частным случаем этого
метода, который называетсяметод с
простоями.
Метод с простоями (Idle Source)требует,
чтобы источник, пославший кадр, ожидал
получения квитанции (положительной или
отрицательной) от приемника и только
после этого посылал следующий кадр (или
повторял искаженный). Если же квитанция
не приходит в течение тайм-аута, то кадр
(или квитанция) считается утерянным и
его передача повторяется.
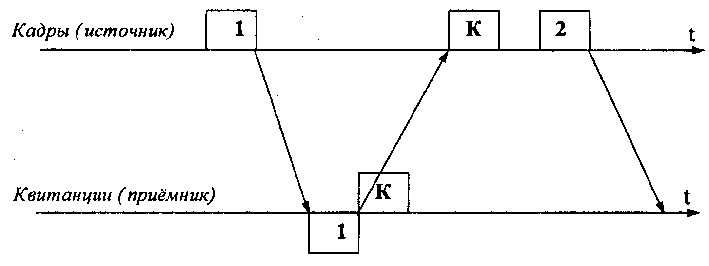
Рис.
6.3 Обмен кадрами и квитанциями при методе
с простоями
На
рисунке видно, что в этом случае
производительность обмена данными
существенно снижается, — хотя передатчик
и мог бы послать следующий кадр сразу
же после отправки предыдущего, он обязан
ждать прихода квитанции. Иногда
использование такого метода может
привести к тому, что, что время ожидания
квитанции будет существенно превышать
время посылки сообщения. Снижение
производительности этого метода
коррекции особенно заметно на
низкоскоростных каналах связи
Метод скользящего окна (sliding window)
работает гораздо эффективней. Для
повышения коэффициента использования
линии источнику разрешается передать
некоторое количество кадров в непрерывном
режиме, то есть в максимально возможном
для источника темпе, без получения на
эти кадры положительных ответных
квитанций. (Далее, где это не искажает
существо рассматриваемого вопроса,
положительные квитанции для краткости
будут называться просто квитанциями.)
Количество кадров, которые разрешается
передавать в непрерывном режиме,
называется размером окна.

Рис.
6.4 Обмен кадрами квитанциями при методе
скользящего окна
На
рис.6.4. показан метод скользящего окна
для окна размером в W кадров. В начальный
момент, когда еще не послано ни одного
кадра, окно определяет диапазон кадров
с номерами от 1 до W включительно. Источник
начинает передавать кадры и получать
в ответ квитанции. Для простоты
предположим, что квитанции поступают
в той же последовательности, что и кадры,
которым они соответствуют. В определенный
момент t1 при получении первой квитанции
окно сдвигается на одну позицию, определяя
новый диапазон от 2 до (W+1). Процессы
отправки кадров и получения квитанций
идут достаточно независимо друг от
друга. Если допустим, что в произвольный
момент времени tn источник получил
квитанцию на кадр с номером n. Окно
сдвинулось вправо и определило диапазон
разрешенных к передаче кадров от (n+1) до
(W+n). Все множество кадров, выходящих из
источника, можно разделить на перечисленные
ниже группы:
1. Кадры
с номерами от 1 до n — уже были отправлены
и квитанции на них получены, то есть они
находятся за пределами окна слева.
2. Кадры,
начиная с номера (n+1) и кончая номером
(W+n) , находятся в пределах окна и потому
могут быть отправлены не дожидаясь
прихода какой-либо квитанции. Этот
диапазон может быть разделен еще на два
поддиапазона:
кадры с номерами от (n+1) до m, которые уже
отправлены, но квитанции на них еще не
получены;
кадры с номерами от m до (W+n) , которые
пока не отправлены, хотя запрета на это
нет.
3.Все
кадры с номерами, большими или равными
(W+n+1) , находятся за пределами окна справа
и поэтому пока не могут быть отправлены.
Каждый
раз, когда приходит квитанция, окно
сдвигается влево, но его размер при этом
не меняется и остается равным W. Заметим,
что хотя в данном примере размер окна
в процессе передачи остается постоянным,
в реальных протоколах можно встретить
варианты данного алгоритма с изменяющимся
размером окна.
Итак,
при отправке кадра с номером n источнику
разрешается передать еще W-1 кадров до
получения квитанции на кадр n, так что
в сеть последним уйдет кадр с номером
(W+n-1) .
Если
же за это время квитанция на кадр n так
и не пришла, то процесс передачи
приостанавливается, и по истечении
некоторого тайм-аута кадр n (или квитанция
на него) считается утерянным, и он
передается снова.
Если
же поток квитанций поступает более-менее
регулярно, в пределах допуска в W кадров,
то скорость обмена достигает максимально
возможной величины для данного канала
и принятого протокола.
Метод скользящего окна более сложен в
реализации, чем метод с простоями, так
как передатчик должен хранить в буфере
все кадры, на которые пока не получены
положительные квитанции. Кроме того,
требуется отслеживать несколько
параметров алгоритма: размер окна W,
номер кадра, на который получена
квитанция, номер кадра, который еще
можно передать до получения новой
квитанции.
Приемник
может не посылать квитанции на каждый
принятый корректный кадр. Если несколько
кадров пришли почти одновременно, то
приемник может послать квитанцию только
на последний кадр. При этом подразумевается,
что все предыдущие кадры также дошли
благополучно.
Некоторые
методы используют отрицательные
квитанции. Отрицательные квитанции
бывают двух типов — групповые и
избирательные. Групповая квитанция
содержит номер кадра, начиная с которого
нужно повторить передачу всех кадров,
отправленных передатчиком в сеть.
Избирательная отрицательная квитанция
требует повторной передачи только
одного кадра.
Метод скользящего окна имеет два
параметра, которые могут заметно влиять
на эффективность передачи данных между
передатчиком и приемником, — размер окна
и величина тайм-аута ожидания квитанции.
В
надежных сетях, когда кадры искажаются
и теряются редко, для повышения скорости
обмена данными размер окна нужно
увеличивать, так как при этом передатчик
будет посылать кадры с меньшими паузами.
В ненадежных сетях размер окна следует
уменьшать, так как при частых потерях
и искажениях кадров резко возрастает
объем вторично передаваемых через сеть
кадров, а значит, пропускная способность
сети будет расходоваться во многом
вхолостую — полезная пропускная
способность сети будет падать.
Выбор
тайм-аута зависит не от надежности сети,
а от задержек передачи кадров сетью. Во
многих реализациях метода скользящего
окна величина окна и тайм-аут выбираются
адаптивно, в зависимости от текущего
состояния сети.
6.4. Методы обнаружения ошибок на
канальному уровне.
После
того, как мы выяснили, какими средствами
располагает канальный уровень для
коррекции ошибок при передаче, очевидно,
нам нужно познакомится и с его методами
их обнаружения.
Канальный уровень должен обнаруживать
ошибки передачи данных, связанные с
искажением бит в принятом кадре данных
или с потерей кадра, и по возможности
их корректировать.
Большая
часть протоколов канального уровня
выполняет только первую задачу —
обнаружение ошибок, считая, что
корректировать ошибки, то есть повторно
передавать данные, содержавшие искаженную
информацию, должны протоколы верхних
уровней.
Однако
существуют протоколы канального уровня,
которые самостоятельно решают задачу
восстановления искаженных или потерянных
кадров.
Очевидно,
что протоколы должны работать наиболее
эффективно в типичных условиях работы
сети. Поэтому для сетей, в которых
искажения и потери кадров являются
очень редкими событиями, разрабатываются
протоколы, в которых не предусматриваются
процедуры устранения ошибок. Действительно,
наличие процедур восстановления данных
потребовало бы от конечных узлов
дополнительных вычислительных затрат,
которые в условиях надежной работы сети
являлись бы избыточными.
Напротив,
если в сети искажения и потери случаются
часто, то желательно уже на канальном
уровне использовать протокол с коррекцией
ошибок, а не оставлять эту работу
протоколам верхних уровней. Протоколы
верхних уровней, например транспортного
или прикладного, работая с большими
тайм-аутами, восстановят потерянные
данные с большой задержкой.
Поэтому
нельзя считать, что один протокол лучше
другого потому, что он восстанавливает
ошибочные кадры, а другой протокол —
нет. Каждый протокол должен работать в
тех условиях, для которых он разработан.
Все методы обнаружения ошибок на
канальном уровне основаны на передаче
в составе кадра данных служебной
избыточной информации, по которой можно
судить с некоторой степенью вероятности
о достоверности принятых данных. Эту
служебную информацию принято называть
контрольной суммой или (последовательностью
контроля кадра — Frame Check Sequence, FCS).
Контрольная сумма вычисляется как
функция от основной информации, причем
необязательно только путем суммирования.
Принимающая сторона повторно вычисляет
контрольную сумму кадра по известному
алгоритму и в случае ее совпадения с
контрольной суммой, вычисленной
передающей стороной, делает вывод о
том, что данные были переданы через сеть
корректно.
Существует
несколько распространенных алгоритмов
вычисления контрольной суммы, отличающихся
вычислительной сложностью и способностью
обнаруживать ошибки в данных.
Контроль по паритету . Этот метод
представляет собой наиболее простой
метод контроля данных и наименее мощный
алгоритм контроля, так как с его помощью
можно обнаружить только одиночные
ошибки в проверяемых данных. Метод
заключается в суммировании по модулю
2 всех бит контролируемой информации.
Например, для данных 100101011 результатом
контрольного суммирования будет значение
1.
Результат
суммирования также представляет собой
один бит данных, который пересылается
вместе с контролируемой информацией.
При искажении при пересылке любого
одного бита исходных данных (или
контрольного разряда) результат
суммирования будет отличаться от
принятого контрольного разряда, что
говорит об ошибке.
Однако
двойная ошибка, например 110101010, будет
неверно принята за корректные данные.
Поэтому контроль по паритету применяется
к небольшим порциям данных, как правило,
к каждому байту, что дает коэффициент
избыточности для этого метода 1/8. Метод
редко применяется в вычислительных
сетях из-за его большой избыточности и
невысоких диагностических способностей.
Вертикальный и горизонтальный контроль
по паритетупредставляет собой
модификацию описанного выше метода.
Его отличие состоит в том, что исходные
данные рассматриваются в виде матрицы,
строки которой составляют байты данных.
Контрольный разряд подсчитывается
отдельно для каждой строки и для каждого
столбца матрицы.

Рис.
6.5 Метод вертикального и горизонтального
контроля по паритету
Этот
метод обнаруживает большую часть двойных
ошибок, однако обладает еще большей
избыточностью. На практике сейчас также
почти не применяется.
Циклический избыточный контроль
(Cyclic Redundancy Check, CRC) Этот метод является
в настоящее время наиболее популярным
методом контроля в вычислительных сетях
(и не только в сетях, например, этот метод
широко применяется при записи данных
на диски и дискеты). Метод основан на
рассмотрении исходных данных в виде
одного многоразрядного двоичного числа.
Например, кадр, состоящий из 1024 байт,
будет рассматриваться как одно число,
состоящее из 8192 бит. В качестве контрольной
информации рассматривается остаток от
деления этого числа на известный делитель
R. Обычно в качестве делителя выбирается
семнадцати- или тридцати трехразрядное
число, чтобы остаток от деления имел
длину 16 разрядов (2 байт) — CRC16, или 32
разряда (4 байт) — CRC32.
При
получении кадра данных снова вычисляется
остаток от деления на тот же делитель
R, но при этом к данным кадра добавляется
и содержащаяся в нем контрольная сумма.
Если остаток от деления на R равен нулю,
то делается вывод об отсутствии ошибок
в полученном кадре, в противном случае
кадр считается искаженным. Этот метод
обладает более высокой вычислительной
сложностью, но его диагностические
возможности гораздо выше, чем у методов
контроля по паритету. Метод CRC обнаруживает
все одиночные ошибки, двойные ошибки и
ошибки в нечетном числе бит. Метод
обладает также невысокой степенью
избыточности. Например, для кадра
размером в 1024 байт контрольная информация
длиной в 4 байт составляет только 0,4 %.
-
Адресация
пакетов.
Каждый
абонент (узел) локальной сети должен
иметь свой уникальный адрес (идентификатор,
МАС-адрес), чтобы ему можно было адресовать
пакеты.
Существуют
две основные системы присвоения адресам
абонентам:
1.При установке сети каждому абоненту
присваивается аппаратно (с помощью
переключателей на плате адаптера) или
программно. При этом количество разрядов
адреса определяется как 2n>Nmax,
где n — количество разрядов адреса;Nmax– максимально возможное число абонентов
сети (Например, n=8, еслиNmax=255,
один адрес используется для адресации
пакетов всем абонентам сети –
широковещательной передачи). Реализован
вArcnet.Достоинства:
простота и малый объем служебной
информации в пакете, а также простота
аппаратуры адаптера, распознающей адрес
пакета. Недостаток: трудоемкость задания
адресов и возможность ошибки (например,
двум абонентам сети может быть присвоен
один и тот же адрес).
2. Разработан международной организацией
IEEE, используется в
большинстве сетей. Уникальный сетевой
адрес присваивается каждому адаптеру
сети еще на этапе его изготовления. Был
выбран 48-битный формат адреса, что
соответствует примерно 280триллионам различных адресов. Чтобы
распределить возможные диапазоны
адресов между многочисленными
изготовителями сетевых адаптеров, была
предложена следующая структура адреса,
которая представлена на рис 6.6

Рис. 6.6.Структура 48-битного
стандартного адреса
Младшие 24разряда кода
адреса называютсяOUA(OrganizationallyUniqueAddress) —
организационно уникальный адрес.
Именно их присваивает производитель
сетевого адаптера. Всего возможно
свыше 1б миллионов
комбинаций.
Следующие 22разряда кода
называютсяOUI(OrganizationallyUniqueIdentifier)
— организационно уникальный
идентификатор.IEEEприсваивает один или несколько
OUIкаждому производителю сетевых
адаптеров. Это позволяет исключить
совпадения адресов адаптеров от разных
производителей. Всего возможно свыше
4миллионов разных OUI.Вместе OUAи OUIназываютсяUAA(UniversallyAdministeredAddress)
—универсально управляемый
адресили IEEE-адрес.
Два старших разряда адреса являются
управляющими и определяют тип адреса,
способ интерпретации остальных
46 разрядов.
Старший бит I/G
(Individual/Group)определяет, индивидуальный это адрес
или групповой. Если он установлен в
0,то мы имеем дело с индивидуальным
адресом, если установлен в
1,то с групповым (многопунктовым
или функциональным) адресом. Пакеты
с групповым адресом получают все
имеющие его сетевые адаптеры, причём
групповой адрес определяется всеми
46младшими разрядами.
Второй управляющий бит U/L
(Universal/Local)называется флажком универсального/местного
управления и определяет, как был присвоен
адрес данному сетевому адаптеру. Обычно
он установлен в 0.Установка
бита U/Lв 1означает, что адрес задан не производителем
сетевого адаптера, а организацией,
использующей данную сеть. Это довольно
редкая ситуация.
Для широковещательной передачи
используется специально выделенный
сетевой адрес, все 48битов
которого установлены в единицу. Его
принимают все абоненты сети независимо
от их индивидуальных и групповых
адресов.
Данной
системы адресов придерживаются, например,
такие популярные сети, как Ethernet,FastEthernet,Token-Ring,FDDI,
100VG-AnyLAN.
Ее
недостатки — высокая сложность аппаратуры
сетевых адаптеров, а также большая
доля служебной информации в передаваемом
пакете (адрес источника и адрес приемника
требуют уже 96 (48+48)битов
пакета, или 12байт).
Во многих сетевых адаптерах предусмотрен
так называемый циркулярный режим. В
этом режиме адаптер принимает все
пакеты, приходящие к нему, независимо
от значения поля адреса приемника. Этот
режим используется, например, для
проведения диагностики сети, измерения
ее производительности, контроля за
ошибками передачи. В этом случае один
компьютер принимает и контролирует все
пакеты, проходящие по сети, но сам ничего
не передает. В этом же режиме работают
сетевые адаптеры мостов и коммутаторы,
которые должны обрабатывать перед
ретрансляцией все приходящие к ним
пакеты.
6.6
Методы управления обменом.
6.6.1 Классификация методов управления
обменом.
Сеть всегда объединяет несколько
абонентов, каждый из которых имеет право
передавать свои пакеты. Но по одному
кабелю не может одновременно
передаваться два пакета, иначе возможен
конфликт (коллизия), что приведет к
искажению и потере обоих пакетов. Следует
установить очередность доступа к сети
(захвата сети) всеми абонентами, желающими
передавать.
Поэтому
в любой сети применяется тот или иной
метод управления обменом (он же метод
доступа, он же метод арбитража), разрешающий
или предотвращающий конфликты между
абонентами. От эффективности выбранного
метода зависит очень многое: скорость
обмена информацией между компьютерами,
нагрузочная способность сети, время
реакции сети на внешние события и т.д.
Метод
управления -это один из
важнейших параметров сети. Тип метода
управления обменом во многом определяется
особенностями топологии сети.
Методы управления обменом делятся на
две группы:
—
Централизованные методы, при
которых все управление сосредоточенно
в одном месте — центре. Недостатки таких
методов:неустойчивость
к отказам центра, малая гибкость
управления. Достоинство -отсутствие конфликтов.
—
Децентрализованные методы, при
которых отсутствует центр управления.
Достоинства таких методов: высокая
устойчивость к отказам и большая
гибкость, а недостатки — возможны
конфликты, которые надо разрешать.
Децентрализованные
методы делятся на:
—
Детерминированные методы,
которые определяют четкие правила
чередования захвата сети абонентами.
Абоненты имеют различные приоритеты.
При этом конфликты полностью исключены
(или маловероятны), но некоторые
абоненты могут дожидаться своей очереди
слишком долго. К детерминированным
методам относится, например, маркерный
доступ, при котором право передачи
передается по эстафете от абонента к
абоненту.
Случайные
методы, которые определяют случайное
чередование передающих абонентов. В
этом случае имеется возможность
конфликтов, но предлагаются способы
их разрешения. Случайные методы
работают хуже, чем детерминированные,
при больших информационных потоках в
сети (при большом графике сети) и не
гарантируют абоненту величину времени
доступа (это интервал между возникновением
желания передавать и получением
возможности передать свой пакет).
Пример случайного метода -стандартный методCSMA/CD(Carrier-SenseMultipleAccesswithCollisionDetection)МНДК/ОК(множественный доступ с контролем
несущей и обнаружением коллизий
(столкновений)).
Рассмотрим
три наиболее типичных метода управления
обменом, характерных для трех основных
топологий.
6.6.2 Управление обменом в сети типа
«звезда».
Речь
идет только об активной истинной звезде.
Чаще всего центральный абонент может
производить обмен только с одним
периферийных абонентов. Поэтому в любой
момент времени нужно выделить только
одного абонента ведущего передачу.
Здесь возможны два решения:
-
Активный
центр. Ц посылает запросы (управляющие
пакеты) по очереди всем АП. АП, который
хочет передавать (первый из опрошенных)
посылает ответ и сразу же начинает
передавать. После окончания сеанса Ц
продолжает опрос по кругу. АП имеют
географические приоритеты: максимальный
приоритет у того, кто ближе к последнему
абоненту, закончившему обмен. Ц передает
без всякой очереди. -
Пассивный
центр. Ц не опрашивает, а слушает всех
АП по очереди (т.е. принимает пакеты
только от одного из них.) АП посылают
запросы и ждут ответа. Когда центр
принимает запрос, он отвечает запросившему
АП (разрешает ему передачу).
Управление
обменом централизованное.

Рис. 6.7.Централизованный
метод управления обменом в сетяхтопологией «звезда»
Преимущества:
-
невозможность
конфликтов между абонентами. -
гарантированное
время доступа, т.е. время между возникешим
желанием передать до момента предачи.
Недостатки:
-
низкая
устойчивость к отказам (если Ц выходит
из строя) -
недостаточная
гибкость (Ц всегда работает по жестко
заданному алгоритму) -
низкая
скорость управления (если работает
только один ему приходится ждать пока
опросят всех).
6.6.3.Управление обменом в сети типа
«шина».
Тоже
возможны два решения:
Централизованное
и децентрализованное
Централизованное
управление, как и в звезде (физически
шина, но логически звезда). Ц посылает
всем АП запросы, выясняя, кто хочет
предать, разрешая ему передачу. После
окончания передачи АП посылает сообщение,
что он закончил и Ц начинает опрос снова.
Единственное отличие от звезды, что Ц
не перекачивает информацию от одного
АП к другому, а только управляет обменом.

Однако
гораздо чаще в шине используется
децентрализованное случайное
управление— при этом все абоненты
имеют равный доступ к сети, т.к. аппаратные
средства всех АП одинаковы, и они имеют
одинаковые права доступа к сети. Решение
о том, когда можно передавать свой пакет,
принимается каждым абонентом исходя
из анализа состояния сети. Возникает
конкуренция за захват сети и, следовательно,
возможны искажения передаваемых сигналов
из-за наложения пакетов.
Существует
множество алгоритмов доступа или
сценариев доступа. Рассмотрим некоторые:
Децентрализованный кодовый приоритетный
арбитраж. Его смысл состоит в
распознавании столкновений двух или
более пакетов в начале передачи и
прекращения в случае столкновения
передачи всеми абонентами кроме одного.
Т.е. нужно определить, занята или свободна
сеть, для этого передаваемые пакеты
снабжаются начальной (кодовой) информацией.
Идет жесткая привязка к коду передачи
информации.
Децентрализованный временной
приоритетный арбитраж. Основная идея
данного метода состоит в том, чтобы
свести вероятность столкновений к
пренебрежимо малой величине. Предлагается
следующий алгоритм. Сначала все абоненты
следят за состоянием сети. Если она
свободна, то передача начинается сразу
же после возникновения заявки на нее.
Если сеть занята, то сразу же после ее
освобождения все абоненты отсчитывают
свой собственный уникальный временной
интервал, пропорциональный коду сетевого
адреса данного абонента. Таким образом
абонент 0 начинает передачу сразу,
абонент с 1-м адресом через времяt со вторым через время 2tи т.д. Если к концу временного интервала
сеть все еще остается свободной, то
абонент начинает передачу. В противном
случае ждет освобождения сети.
При большой загрузке сети абонентам с
малыми приорететами приходится долго
ждать. Приоритет определяетмя исходя
из времени задаржки начала передачи
минимальное время — максимальный
приоритет. О гарантированном времени
доступа к сети для всех абонентов и
говорить не приходится. Этот метод
полностью не исключает столкновений
(заявки на передачу при свободной сети
могут возникнуть одновременно).
Третий метод можно считать развитием
второго и он получил название множественный
доступ с контролем несущей и обнаружением
коллизий (столкновений).(МНДК/ОК
CSMA/CD Carrier-Sense Multiple Access/Collision Detection). Один
из самых популярных, используемый в
сетяхEthernet,FastEthernet. Относится к
децентрализованным случайным (точнее
квазислучайным) методам. Подробнее о
названии метода. В сети работавшей с
1970 года на Гавайских островах, использовался
Радиоканал и установленный на спутнике
ретранслятор – отсюда слово «несущая»
в названии метода. В этой сети был
реализован множественный доступ с
контролем несущей без обнаружения
коллизий. В сетяхEthernet,FastEthernetв
качестве несущей частоты выступает
синхросигнал «подмешиваемый» в
передаваемые данные.
Идея
метода состоит в том , чтобы уравнять в
правах всех абонентов, т.е. чтобы не было
фиксированных приоритетов, и абоненты
не могли надолго заблокировать обмен.
Для этого время задержки вычисляется
каждым абонентом самостоятельно.
Информация передается абонентами
кадрами или пакетами (для МНДК/ОК понятия
кадр и пакет не различаются). Алгоритм
МНДК/ОК можно представить следующим
образом:
-
Абонент
желающий передавать следит за состоянием
сети (контроль несущей частоты Мачестер
2). Если сеть свободна, то передача
начинается после того, как прошло время,
составляющее межкадровый интервал —
промежуток времени между передаваемыми
пакетами (блок 1, 2). -
После
освобождения сети абонент сразу же
начинает передавать и одновременно
после передачи каждого бита контролирует
состояние сети (обнаружение коллизий),
если столкновений не обнаруживается,
то передача доводится до окончания
пакета. В этом случае считается, что
передача прошла успешно. -
Если
после передачи какого либо бита
столкновение обнаружено, то передача
пакета прекращается. Абонент усиливает
коллизию передавая 32-битный сигнал
ПРОБКА. Увеличивает значение счетчика
попыток. Максимальное число попыток
не более 16. Если счетчик переполнился,
то считается, сто сеть сильно перегружена,
в ней сильно много коллизий, ситуация
аварийная и обрабатывается на более
высоких уровнях протоколов обмена. -
После прекращения неудачной передачи
абонент вычислчет время задержки по
некоторой формуле, где присутствует
генератор случайных чисел. Выдерживает
выбранный промежуток времени и повторяет
попытку(п. 1) -
Если
в момент возникновения заявки на
передачу сеть занята, то абонент ждет
освобождения сети.
При
любом случайном методе управления
обменом возникает вопрос о том, какой
должна быть минимальная длительность
пакета, чтобы коллизию обнаружили все
начавшие предавать абоненты. Минимально
допустима длительность пакета в сети
должна составлять Dmin=2L/V,
гдеL– полная длина
сети;V- скорость
распространения сигнала в используемом
кабеле. Это время называют двойным или
круговым временем задержки сигнала в
пути илиPVD(PathDelayValue).Этот временной интервал можно рассматривать
как универсальную меру одновременности
любых событий в сети.

Рис. 6
8 Расчет минимальной длительности пакета
Например,
абонент 1закончил свою
передачу, а абоненты 2и
3захотели передавать во время
передачи абонента 1.После
освобождения сети абонент 3узнает об этом событии и начинает свою
передачу через временной интервал
прохождения сигнала по всей длине сети,
то есть через времяL/V,
а абонент2 начнет передавать сразу после
освобождения сети. Пакет от абонента
3дойдет до абонента 2еще через временной интервал
L/Vпосле начала передачи абонентом
3(обратный путь сигнала). К этому
моменту передача пакета абонентом
2ни в коем случае не должна еще
закончиться, иначе абонент
2так и не узнает столкновении
пакетов (о коллизии).
Отдельно стоит остановиться на том, как
сетевые адаптеры распознают коллизию,
то есть столкновение пакетов. Ведь
простое сравнение передаваемой
абонентом информации с той, которая
реально присутствует в сети, возможно
только в случае самого простого кода
NRZ, используемого
довольно редко. При применении кода
Манчестер-2, который обычно подразумевается
в случае метода управления обменомCSMA/CD,
требуется принципиально другой
подход.
Сигнал
в коде Манчестер-2 всегда имеет постоянную
составляющую, равную половине размаха
сигнала (если один из двух уровней
сигнала нулевой). Однако в случае
столкновения двух и более пакетов
(коллизии) это правило выполняться не
будет. Постоянная составляющая
суммарного сигнала в сети будет
обязательно больше или меньше половины
размаха (рис. 6.9).Ведь
пакеты всегда отличаются друг от друга
и к тому же сдвинуты друг относительно
друга во времени. Именно по выходу уровня
постоянной составляющей за установленные
пределы и определяет каждый сетевой
адаптер наличие коллизии в сети.
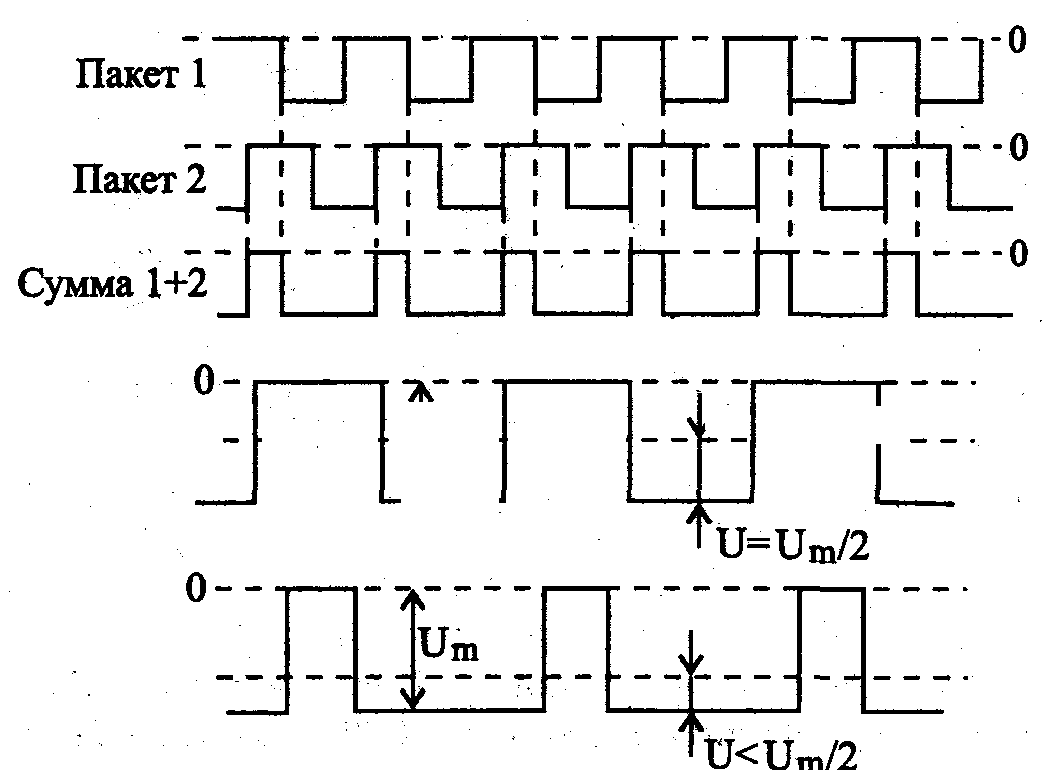
Рис
6.9 Определение факта коллизии при
использовании кода Манчестер-2
6.6.4Управление обменом в сети типа
«кольцо».
Кольцевая
топология имеет свои особенности при
выборе управления обменом. Важным
фактором является то, что любой пакет,
посланный по кольцу последовательно
пройдя всех абонентов, через некоторое
время возвратится в ту же точку — топология
замкнутая. Здесь нет одновременного
распространения сигнала в обе стороны
как по шине. Отметим, что сети типа кольцо
бывают однонаправленными и двунаправленными.
Мы будем рассматривать только
однонаправленные, как более распространенные.
Наиболее
популярными методами управления обменом
в сетях типа кольцо считаются маркерные
(эстафетные) методы, которые используют
небольшой специальный управляющий
пакет – маркер.
Маркерный
метод управления относится, как и
методы опроса (централизованые), к
детерминированным. В отличие от
рассмотренных случайных детерминированные
методы принципиально исключают любые
конфликты в сети, т.к. в них предусмотрен
механизм временного распределения сети
между абонентами. При случайных методах
АП могут начать передачу в любой момент
времени поэтому там конфликты неизбежны.

СМ-
свободный маркер; ЗМ- занятый
маркер;ПМ-занятый маркер с подтверрждением;
ПД – пакет данных
Рис.
Маркерный метод управления обменом
Идея
метода состоит в том, что по кольцу
запускается специальный пакет, называемый
маркером, который отмечает время
возможного начала пакета. Маркер ходит
по кольцу, синхронизируя работу абонентов
сети.
Алгоритм
управления предполагает следующую
последовательность действий:
-
А1,
желающий передать ждет свободный маркер
(пакет, помеченный как свободный).
Получив его А1 помечает его как занятый,
добавляя к нему свой пакет и отправляет
полученный блок следующему по кольцу
абоненту. -
Каждый
абонент кольца (А1,А2,А3) получив блок
маркер+пакет проверяет ему ли адресован
пакет и если пакет не его отправляют
дальше по кольцу. -
Абонент,
распознавший пакет (пусть это будет
А3) принимает пакет и устанавливает в
маркере бит подтверждение и отправляет
посылку маркер + пакет дальше. -
Передававший
абонент (А1) получает обратно свою
посылку освобождает маркер и снова
посылает маркер в сеть.
Приоритет
в данном случае географический, т.е.
право передачи переходит к следующему
за передававшим по кольцу. Здесь нет
выделенного центра, однако один и АП
или спец. устройство должен следить за
тем, чтобы маркер не потерялся. Надежность
в этом случае снижается. Однако основным
преимуществом является гарантированное
время доступа. Следует отметить, что
метод маркерного доступа используется
не только в кольце IBMTokenRing, но и в шинеArcnet-BUS,
и в звездеArcnet-STAR.
В этих случаях используется логическое
кольцо.
Метод
кольцевых сегментов — слотов. Примером
сети, использующий этот метод может
служитьCambridgeRing.
Основное отличие этого метода от
маркерного состоит в том, что нескольким
абонентам разрешена передача одновременно
и в любой момент. Вместо одного маркера
в сети используются несколько так
называемых слотов (от 2 до 8), которые
выполняют туже функцию, что и маркер.
Эти слоты идут довольно часто, временной
интервал между ними невелик и поэтому
информации между ними может уместиться
немного обычно от 8 до 32 байт. При этом
каждый слот может находится в свободном
или занятом состоянии. Алгоритм включает
в себя следующие этапы:
-
АП,
желающий передавать разбивает информацию
на слоты -
затем
ждет прихода свободного слота и загружает
в него часть своей информации, ждет
прихода следующего свободного и
загружает следующую часть и т.д. В каждом
слоте существует бит — свободен или
занят слот, поле сетевого адреса
приемника и передатчика и бит признака
конца информации. -
АП,
которому адресована информация выбирает
слоты, содержащие адресованную ему
информацию и устанавливает бит
подтверждения и так продолжается до
последнего адресованного ему слота. -
Передающий
АП получает свои слоты обратно по кольцу
и освобождает их — помечает как свободные.
Преимущество
данного метода перед маркерным состоит
в том, что сеть занимается несколькими
абонентами. Время доступа гарантированное
и в наихудшем случае случае оно составит
время передачи пакета помноженное на
число абонентов в сети.
Основное
преимущество данных методов перед
CSMA/CDсостоит
в гарантированности времени доступа,
величина которого составляет
![]() , гдеN- число абонентов в
, гдеN- число абонентов в
сети;
![]() — время доступа абонент;
— время доступа абонент;
![]() — время прохождения пакета по кольцу.
— время прохождения пакета по кольцу.
Обнаружение ошибок в технике связи — действие, направленное на контроль целостности данных при записи/воспроизведении информации или при её передаче по линиям связи. Исправление ошибок (коррекция ошибок) — процедура восстановления информации после чтения её из устройства хранения или канала связи.
Для обнаружения ошибок используют коды обнаружения ошибок, для исправления — корректирующие коды (коды, исправляющие ошибки, коды с коррекцией ошибок, помехоустойчивые коды).
Способы борьбы с ошибками
В процессе хранения данных и передачи информации по сетям связи неизбежно возникают ошибки. Контроль целостности данных и исправление ошибок — важные задачи на многих уровнях работы с информацией (в частности, физическом, канальном, транспортном уровнях модели OSI).
В системах связи возможны несколько стратегий борьбы с ошибками:
- обнаружение ошибок в блоках данных и автоматический запрос повторной передачи повреждённых блоков — этот подход применяется в основном на канальном и транспортном уровнях;
- обнаружение ошибок в блоках данных и отбрасывание повреждённых блоков — такой подход иногда применяется в системах потокового мультимедиа, где важна задержка передачи и нет времени на повторную передачу;
- исправление ошибок (forward error correction) применяется на физическом уровне.
Коды обнаружения и исправления ошибок
Корректирующие коды — коды, служащие для обнаружения или исправления ошибок, возникающих при передаче информации под влиянием помех, а также при её хранении.
Для этого при записи (передаче) в полезные данные добавляют специальным образом структурированную избыточную информацию (контрольное число), а при чтении (приёме) её используют для того, чтобы обнаружить или исправить ошибки. Естественно, что число ошибок, которое можно исправить, ограничено и зависит от конкретного применяемого кода.
С кодами, исправляющими ошибки, тесно связаны коды обнаружения ошибок. В отличие от первых, последние могут только установить факт наличия ошибки в переданных данных, но не исправить её.
В действительности, используемые коды обнаружения ошибок принадлежат к тем же классам кодов, что и коды, исправляющие ошибки. Фактически, любой код, исправляющий ошибки, может быть также использован для обнаружения ошибок (при этом он будет способен обнаружить большее число ошибок, чем был способен исправить).
По способу работы с данными коды, исправляющие ошибки делятся на блоковые, делящие информацию на фрагменты постоянной длины и обрабатывающие каждый из них в отдельности, и свёрточные, работающие с данными как с непрерывным потоком.
Блоковые коды
Пусть кодируемая информация делится на фрагменты длиной  бит, которые преобразуются в кодовые слова длиной
бит, которые преобразуются в кодовые слова длиной  бит. Тогда соответствующий блоковый код обычно обозначают
бит. Тогда соответствующий блоковый код обычно обозначают  . При этом число
. При этом число  называется скоростью кода.
называется скоростью кода.
Если исходные бит код оставляет неизменными, и добавляет  проверочных, такой код называется систематическим, иначе несистематическим.
проверочных, такой код называется систематическим, иначе несистематическим.
Задать блоковый код можно по-разному, в том числе таблицей, где каждой совокупности из информационных бит сопоставляется бит кодового слова. Однако, хороший код должен удовлетворять, как минимум, следующим критериям:
- способность исправлять как можно большее число ошибок,
- как можно меньшая избыточность,
- простота кодирования и декодирования.
Нетрудно видеть, что приведённые требования противоречат друг другу. Именно поэтому существует большое количество кодов, каждый из которых пригоден для своего круга задач.
Практически все используемые коды являются линейными. Это связано с тем, что нелинейные коды значительно сложнее исследовать, и для них трудно обеспечить приемлемую лёгкость кодирования и декодирования.
Линейные коды общего вида
Линейный блоковый код — такой код, что множество его кодовых слов образует -мерное линейное подпространство (назовём его  ) в -мерном линейном пространстве, изоморфное пространству -битных векторов.
) в -мерном линейном пространстве, изоморфное пространству -битных векторов.
Это значит, что операция кодирования соответствует умножению исходного -битного вектора на невырожденную матрицу  , называемую порождающей матрицей.
, называемую порождающей матрицей.
Пусть  — ортогональное подпространство по отношению к , а
— ортогональное подпространство по отношению к , а  — матрица, задающая базис этого подпространства. Тогда для любого вектора
— матрица, задающая базис этого подпространства. Тогда для любого вектора  справедливо:
справедливо:

Минимальное расстояние и корректирующая способность
-
Основная статья: Расстояние Хемминга
Расстоянием Хемминга (метрикой Хемминга) между двумя кодовыми словами  и
и  называется количество отличных бит на соответствующих позициях,
называется количество отличных бит на соответствующих позициях,  , что равно числу «единиц» в векторе
, что равно числу «единиц» в векторе  .
.
Минимальное расстояние Хемминга  является важной характеристикой линейного блокового кода. Она показывает насколько «далеко» расположены коды друг от друга. Она определяет другую, не менее важную характеристику — корректирующую способность:
является важной характеристикой линейного блокового кода. Она показывает насколько «далеко» расположены коды друг от друга. Она определяет другую, не менее важную характеристику — корректирующую способность:
- , округляем «вниз», так чтобы .
 , округляем «вниз», так чтобы
, округляем «вниз», так чтобы  .
.Корректирующая способность определяет, сколько ошибок передачи кода (типа  ) можно гарантированно исправить. То есть вокруг каждого кода
) можно гарантированно исправить. То есть вокруг каждого кода  имеем
имеем  -окрестность
-окрестность  , которая состоит из всех возможных вариантов передачи кода с числом ошибок () не более . Никакие две окрестности двух любых кодов не пересекаются друг с другом, так как расстояние между кодами (то есть центрами этих окрестностей) всегда больше двух их радиусов
, которая состоит из всех возможных вариантов передачи кода с числом ошибок () не более . Никакие две окрестности двух любых кодов не пересекаются друг с другом, так как расстояние между кодами (то есть центрами этих окрестностей) всегда больше двух их радиусов  .
.
Таким образом получив искажённый код из декодер принимает решение, что был исходный код , исправляя тем самым не более ошибок.
Поясним на примере. Предположим, что есть два кодовых слова и  , расстояние Хемминга между ними равно 3. Если было передано слово , и канал внёс ошибку в одном бите, она может быть исправлена, так как даже в этом случае принятое слово ближе к кодовому слову , чем к любому другому, и в частности к . Но если каналом были внесены ошибки в двух битах (в которых отличалось от ) то результат ошибочной передачи окажется ближе к , чем , и декодер примет решение что передавалось слово .
, расстояние Хемминга между ними равно 3. Если было передано слово , и канал внёс ошибку в одном бите, она может быть исправлена, так как даже в этом случае принятое слово ближе к кодовому слову , чем к любому другому, и в частности к . Но если каналом были внесены ошибки в двух битах (в которых отличалось от ) то результат ошибочной передачи окажется ближе к , чем , и декодер примет решение что передавалось слово .
Коды Хемминга
Коды Хемминга — простейшие линейные коды с минимальным расстоянием 3, то есть способные исправить одну ошибку. Код Хемминга может быть представлен в таком виде, что синдром
- , где — принятый вектор, будет равен номеру позиции, в которой произошла ошибка. Это свойство позволяет сделать декодирование очень простым.
 , где
, где  — принятый вектор, будет равен номеру позиции, в которой произошла ошибка. Это свойство позволяет сделать декодирование очень простым.
— принятый вектор, будет равен номеру позиции, в которой произошла ошибка. Это свойство позволяет сделать декодирование очень простым.Общий метод декодирования линейных кодов
Любой код (в том числе нелинейный) можно декодировать с помощью обычной таблицы, где каждому значению принятого слова  соответствует наиболее вероятное переданное слово
соответствует наиболее вероятное переданное слово  . Однако, данный метод требует применения огромных таблиц уже для кодовых слов сравнительно небольшой длины.
. Однако, данный метод требует применения огромных таблиц уже для кодовых слов сравнительно небольшой длины.
Для линейных кодов этот метод можно существенно упростить. При этом для каждого принятого вектора вычисляется синдром  . Поскольку
. Поскольку  , где
, где  — кодовое слово, а
— кодовое слово, а  — вектор ошибки, то
— вектор ошибки, то  . Затем с помощью таблицы по синдрому определяется вектор ошибки, с помощью которого определяется переданное кодовое слово. При этом таблица получается гораздо меньше, чем при использовании предыдущего метода.
. Затем с помощью таблицы по синдрому определяется вектор ошибки, с помощью которого определяется переданное кодовое слово. При этом таблица получается гораздо меньше, чем при использовании предыдущего метода.
Линейные циклические коды
Несмотря на то, что декодирование линейных кодов уже значительно проще декодирования большинства нелинейных, для большинства кодов этот процесс всё ещё достаточно сложен. Циклические коды, кроме более простого декодирования, обладают и другими важными свойствами.
Циклическим кодом является линейный код, обладающий следующим свойством: если является кодовым словом, то его циклическая перестановка также является кодовым словом.
Слова циклического кода удобно представлять в виде многочленов. Например, кодовое слово  представляется в виде полинома
представляется в виде полинома  . При этом циклический сдвиг кодового слова эквивалентен умножению многочлена на
. При этом циклический сдвиг кодового слова эквивалентен умножению многочлена на  по модулю
по модулю  .
.
В дальнейшем, если не указано иное, мы будем считать, что циклический код является двоичным, то есть  могут принимать значения 0 или 1.
могут принимать значения 0 или 1.
Порождающий (генераторный) полином
Можно показать, что все кодовые слова конкретного циклического кода кратны определённому порождающему полиному  . Порождающий полином является делителем .
. Порождающий полином является делителем .
С помощью порождающего полинома осуществляется кодирование циклическим кодом. В частности:
Коды CRC
Коды CRC (cyclic redundancy check — циклическая избыточная проверка) являются систематическими кодами, предназначенными не для исправления ошибок, а для их обнаружения. Они используют способ систематического кодирования, изложенный выше: «контрольная сумма» вычисляется путем деления  на . Ввиду того, что исправление ошибок не требуется, проверка правильности передачи может производиться точно так же.
на . Ввиду того, что исправление ошибок не требуется, проверка правильности передачи может производиться точно так же.
Таким образом, вид полинома задаёт конкретный код CRC. Примеры наиболее популярных полиномов:
| название кода | степень | полином |
|---|---|---|
| CRC-12 | 12 | 
|
| CRC-16 | 16 | 
|
| CRC-CCITT | 16 | 
|
| CRC-32 | 32 | 
|
Коды БЧХ
Коды Боуза — Чоудхури — Хоквингема (БЧХ) являются подклассом циклических кодов. Их отличительное свойство — возможность построения кода БЧХ с минимальным расстоянием не меньше заданного. Это важно, потому что, вообще говоря, определение минимального расстояния кода есть очень сложная задача.
Математически полинома на множители в поле Галуа.
Коды коррекции ошибок Рида — Соломона
Коды Рида — Соломона — недвоичные циклические коды, позволяющие исправлять ошибки в блоках данных. Элементами кодового вектора являются не биты, а группы битов (блоки). Очень распространены коды Рида-Соломона, работающие с байтами (октетами).
Математически коды Рида — Соломона являются кодами БЧХ.
Преимущества и недостатки блоковых кодов
Хотя блоковые коды, как правило, хорошо справляются с редкими, но большими пачками ошибок, их эффективность при частых, но небольших ошибках (например, в канале с АБГШ), менее высока.
Свёрточные коды
Файл:ECC NASA standard coder.png
Свёрточный кодер ( )
)
Свёрточные коды, в отличие от блоковых, не делят информацию на фрагменты и работают с ней как со сплошным потоком данных.
Свёрточные коды, как правило, порождаются дискретной линейной инвариантной во времени системой. Поэтому, в отличие от большинства блоковых кодов, свёрточное кодирование — очень простая операция, чего нельзя сказать о декодировании.
Кодирование свёрточным кодом производится с помощью регистра сдвига, отводы от которого суммируются по модулю два. Таких сумм может быть две (чаще всего) или больше.
Декодирование свёрточных кодов, как правило, производится по алгоритму Витерби, который пытается восстановить переданную последовательность согласно критерию максимального правдоподобия.
Преимущества и недостатки свёрточных кодов
Свёрточные коды эффективно работают в канале с белым шумом, но плохо справляются с пакетами ошибок. Более того, если декодер ошибается, на его выходе всегда возникает пакет ошибок.
Каскадное кодирование. Итеративное декодирование
Преимущества разных способов кодирования можно объединить, применив каскадное кодирование. При этом информация сначала кодируется одним кодом, а затем другим, в результате получается код-произведение.
Например, популярной является следующая конструкция: данные кодируются кодом Рида-Соломона, затем перемежаются (при этом символы, расположенные близко, помещаются далеко друг от друга) и кодируются свёрточным кодом. На приёмнике сначала декодируется свёрточный код, затем осуществляется обратное перемежение (при этом пачки ошибок на выходе свёрточного декодера попадают в разные кодовые слова кода Рида — Соломона), и затем осуществляется декодирование кода Рида — Соломона.
Некоторые коды-произведения специально сконструированы для итеративного декодирования, при котором декодирование осуществляется в несколько проходов, каждый из которых использует информацию от предыдущего. Это позволяет добиться большой эффективности, однако, декодирование требует больших ресурсов. К таким кодам относят турбо-коды и LDPC-коды (коды Галлагера).
Оценка эффективности кодов
Эффективность кодов определяется количеством ошибок, которые тот может исправить, количеством избыточной информации, добавление которой требуется, а также сложностью реализации кодирования и декодирования (как аппаратной, так и в виде программы для ЭВМ).
Граница Хемминга и совершенные коды
-
Основная статья: Граница Хэмминга
Пусть имеется двоичный блоковый  код с корректирующей способностью . Тогда справедливо неравенство (называемое границей Хемминга):
код с корректирующей способностью . Тогда справедливо неравенство (называемое границей Хемминга):

Коды, удовлетворяющие этой границе с равенством, называются совершенными. К совершенным кодам относятся, например, коды Хемминга. Часто применяемые на практике коды с большой корректирующей способностью (такие, как коды Рида — Соломона) не являются совершенными.
Энергетический выигрыш
При передаче информации по каналу связи вероятность ошибки зависит от отношения сигнал/шум на входе демодулятора, таким образом при постоянном уровне шума решающее значение имеет мощность передатчика. В системах спутниковой и мобильной, а также других типов связи остро стоит вопрос экономии энергии. Кроме того, в определённых системах связи (например, телефонной) неограниченно повышать мощность сигнала не дают технические ограничения.
Поскольку помехоустойчивое кодирование позволяет исправлять ошибки, при его применении мощность передатчика можно снизить, оставляя скорость передачи информации неизменной. Энергетический выигрыш определяется как разница отношений с/ш при наличии и отсутствии кодирования.
Применение кодов, исправляющих ошибки
Коды, исправляющие ошибки, применяются:
- в системах цифровой связи, в том числе: спутниковой, радиорелейной, сотовой, передаче данных по телефонным каналам.
- в системах хранения информации, в том числе магнитных и оптических.
Коды, обнаруживающие ошибки, применяются в сетевых протоколах различных уровней.
Автоматический запрос повторной передачи
Системы с автоматическим запросом повторной передачи (ARQ — Automatic Repeat reQuest) основаны на технологии обнаружения ошибок. Распространены следующие методы автоматического запроса:
Запрос ARQ с остановками (stop-and-wait ARQ)
Идея этого метода заключается в том, что передатчик ожидает от приемника подтверждения успешного приема предыдущего блока данных перед тем как начать передачу следующего. В случае, если блок данных был принят с ошибкой, приемник передает отрицательное подтверждение (negative acknowledgement, NAK), и передатчик повторяет передачу блока. Данный метод подходит для полудуплексного канала связи. Его недостатком является низкая скорость из-за высоких накладных расходов на ожидание.
Непрерывный запрос ARQ с возвратом (continuous ARQ with pullback)
Для этого метода необходим полнодуплексный канал. Передача данных от передатчика к приемнику производится одновременно. В случае ошибки передача возобновляется, начиная с ошибочного блока (то есть, передается ошибочный блок и все последующие).
Непрерывный запрос ARQ с выборочным повторением (continuous ARQ with selective repeat)
При этом подходе осуществляется передача только ошибочно принятых блоков данных.
См. также
- Цифровая связь
- Линейный код
- Циклический код
- Код Боуза — Чоудхури — Хоквингема
- Код Рида — Соломона
- LDPC
- Свёрточный код
- Турбо-код
Литература
- Мак-Вильямс Ф. Дж., Слоэн Н. Дж. А. Теория кодов, исправляющих ошибки. М.: Радио и связь, 1979.
- Блейхут Р. Теория и практика кодов, контролирующих ошибки. М.: Мир, 1986.
- Морелос-Сарагоса Р. Искусство помехоустойчивого кодирования. Методы, алгоритмы, применение. М.: Техносфера, 2005. — ISBN 5-94836-035-0
Ссылки
Имеется викиучебник по теме:
Обнаружение и исправление ошибок
- Помехоустойчивое кодирование (11 ноября 2001). — реферат по проблеме кодирования сообщений с исправлением ошибок. Проверено 25 декабря 2006.
Эта страница использует содержимое раздела Википедии на русском языке. Оригинальная статья находится по адресу: Обнаружение и исправление ошибок. Список первоначальных авторов статьи можно посмотреть в истории правок. Эта статья так же, как и статья, размещённая в Википедии, доступна на условиях CC-BY-SA .

To clean up transmission errors introduced by Earth’s atmosphere (left), Goddard scientists applied Reed–Solomon error correction (right), which is commonly used in CDs and DVDs. Typical errors include missing pixels (white) and false signals (black). The white stripe indicates a brief period when transmission was interrupted.
In information theory and coding theory with applications in computer science and telecommunication, error detection and correction (EDAC) or error control are techniques that enable reliable delivery of digital data over unreliable communication channels. Many communication channels are subject to channel noise, and thus errors may be introduced during transmission from the source to a receiver. Error detection techniques allow detecting such errors, while error correction enables reconstruction of the original data in many cases.
Definitions[edit]
Error detection is the detection of errors caused by noise or other impairments during transmission from the transmitter to the receiver.
Error correction is the detection of errors and reconstruction of the original, error-free data.
History[edit]
In classical antiquity, copyists of the Hebrew Bible were paid for their work according to the number of stichs (lines of verse). As the prose books of the Bible were hardly ever written in stichs, the copyists, in order to estimate the amount of work, had to count the letters.[1] This also helped ensure accuracy in the transmission of the text with the production of subsequent copies.[2][3] Between the 7th and 10th centuries CE a group of Jewish scribes formalized and expanded this to create the Numerical Masorah to ensure accurate reproduction of the sacred text. It included counts of the number of words in a line, section, book and groups of books, noting the middle stich of a book, word use statistics, and commentary.[1] Standards became such that a deviation in even a single letter in a Torah scroll was considered unacceptable.[4] The effectiveness of their error correction method was verified by the accuracy of copying through the centuries demonstrated by discovery of the Dead Sea Scrolls in 1947–1956, dating from c. 150 BCE-75 CE.[5]
The modern development of error correction codes is credited to Richard Hamming in 1947.[6] A description of Hamming’s code appeared in Claude Shannon’s A Mathematical Theory of Communication[7] and was quickly generalized by Marcel J. E. Golay.[8]
Principles[edit]
All error-detection and correction schemes add some redundancy (i.e., some extra data) to a message, which receivers can use to check consistency of the delivered message and to recover data that has been determined to be corrupted. Error detection and correction schemes can be either systematic or non-systematic. In a systematic scheme, the transmitter sends the original (error-free) data and attaches a fixed number of check bits (or parity data), which are derived from the data bits by some encoding algorithm. If error detection is required, a receiver can simply apply the same algorithm to the received data bits and compare its output with the received check bits; if the values do not match, an error has occurred at some point during the transmission. If error correction is required, a receiver can apply the decoding algorithm to the received data bits and the received check bits to recover the original error-free data. In a system that uses a non-systematic code, the original message is transformed into an encoded message carrying the same information and that has at least as many bits as the original message.
Good error control performance requires the scheme to be selected based on the characteristics of the communication channel. Common channel models include memoryless models where errors occur randomly and with a certain probability, and dynamic models where errors occur primarily in bursts. Consequently, error-detecting and correcting codes can be generally distinguished between random-error-detecting/correcting and burst-error-detecting/correcting. Some codes can also be suitable for a mixture of random errors and burst errors.
If the channel characteristics cannot be determined, or are highly variable, an error-detection scheme may be combined with a system for retransmissions of erroneous data. This is known as automatic repeat request (ARQ), and is most notably used in the Internet. An alternate approach for error control is hybrid automatic repeat request (HARQ), which is a combination of ARQ and error-correction coding.
Types of error correction[edit]
There are three major types of error correction:[9]
Automatic repeat request[edit]
Automatic repeat request (ARQ) is an error control method for data transmission that makes use of error-detection codes, acknowledgment and/or negative acknowledgment messages, and timeouts to achieve reliable data transmission. An acknowledgment is a message sent by the receiver to indicate that it has correctly received a data frame.
Usually, when the transmitter does not receive the acknowledgment before the timeout occurs (i.e., within a reasonable amount of time after sending the data frame), it retransmits the frame until it is either correctly received or the error persists beyond a predetermined number of retransmissions.
Three types of ARQ protocols are Stop-and-wait ARQ, Go-Back-N ARQ, and Selective Repeat ARQ.
ARQ is appropriate if the communication channel has varying or unknown capacity, such as is the case on the Internet. However, ARQ requires the availability of a back channel, results in possibly increased latency due to retransmissions, and requires the maintenance of buffers and timers for retransmissions, which in the case of network congestion can put a strain on the server and overall network capacity.[10]
For example, ARQ is used on shortwave radio data links in the form of ARQ-E, or combined with multiplexing as ARQ-M.
Forward error correction[edit]
Forward error correction (FEC) is a process of adding redundant data such as an error-correcting code (ECC) to a message so that it can be recovered by a receiver even when a number of errors (up to the capability of the code being used) are introduced, either during the process of transmission or on storage. Since the receiver does not have to ask the sender for retransmission of the data, a backchannel is not required in forward error correction. Error-correcting codes are used in lower-layer communication such as cellular network, high-speed fiber-optic communication and Wi-Fi,[11][12] as well as for reliable storage in media such as flash memory, hard disk and RAM.[13]
Error-correcting codes are usually distinguished between convolutional codes and block codes:
- Convolutional codes are processed on a bit-by-bit basis. They are particularly suitable for implementation in hardware, and the Viterbi decoder allows optimal decoding.
- Block codes are processed on a block-by-block basis. Early examples of block codes are repetition codes, Hamming codes and multidimensional parity-check codes. They were followed by a number of efficient codes, Reed–Solomon codes being the most notable due to their current widespread use. Turbo codes and low-density parity-check codes (LDPC) are relatively new constructions that can provide almost optimal efficiency.
Shannon’s theorem is an important theorem in forward error correction, and describes the maximum information rate at which reliable communication is possible over a channel that has a certain error probability or signal-to-noise ratio (SNR). This strict upper limit is expressed in terms of the channel capacity. More specifically, the theorem says that there exist codes such that with increasing encoding length the probability of error on a discrete memoryless channel can be made arbitrarily small, provided that the code rate is smaller than the channel capacity. The code rate is defined as the fraction k/n of k source symbols and n encoded symbols.
The actual maximum code rate allowed depends on the error-correcting code used, and may be lower. This is because Shannon’s proof was only of existential nature, and did not show how to construct codes that are both optimal and have efficient encoding and decoding algorithms.
Hybrid schemes[edit]
Hybrid ARQ is a combination of ARQ and forward error correction. There are two basic approaches:[10]
- Messages are always transmitted with FEC parity data (and error-detection redundancy). A receiver decodes a message using the parity information and requests retransmission using ARQ only if the parity data was not sufficient for successful decoding (identified through a failed integrity check).
- Messages are transmitted without parity data (only with error-detection information). If a receiver detects an error, it requests FEC information from the transmitter using ARQ and uses it to reconstruct the original message.
The latter approach is particularly attractive on an erasure channel when using a rateless erasure code.
Types of error detection[edit]
Error detection is most commonly realized using a suitable hash function (or specifically, a checksum, cyclic redundancy check or other algorithm). A hash function adds a fixed-length tag to a message, which enables receivers to verify the delivered message by recomputing the tag and comparing it with the one provided.
There exists a vast variety of different hash function designs. However, some are of particularly widespread use because of either their simplicity or their suitability for detecting certain kinds of errors (e.g., the cyclic redundancy check’s performance in detecting burst errors).
Minimum distance coding[edit]
A random-error-correcting code based on minimum distance coding can provide a strict guarantee on the number of detectable errors, but it may not protect against a preimage attack.
Repetition codes[edit]
A repetition code is a coding scheme that repeats the bits across a channel to achieve error-free communication. Given a stream of data to be transmitted, the data are divided into blocks of bits. Each block is transmitted some predetermined number of times. For example, to send the bit pattern 1011, the four-bit block can be repeated three times, thus producing 1011 1011 1011. If this twelve-bit pattern was received as 1010 1011 1011 – where the first block is unlike the other two – an error has occurred.
A repetition code is very inefficient and can be susceptible to problems if the error occurs in exactly the same place for each group (e.g., 1010 1010 1010 in the previous example would be detected as correct). The advantage of repetition codes is that they are extremely simple, and are in fact used in some transmissions of numbers stations.[14][15]
Parity bit[edit]
A parity bit is a bit that is added to a group of source bits to ensure that the number of set bits (i.e., bits with value 1) in the outcome is even or odd. It is a very simple scheme that can be used to detect single or any other odd number (i.e., three, five, etc.) of errors in the output. An even number of flipped bits will make the parity bit appear correct even though the data is erroneous.
Parity bits added to each word sent are called transverse redundancy checks, while those added at the end of a stream of words are called longitudinal redundancy checks. For example, if each of a series of m-bit words has a parity bit added, showing whether there were an odd or even number of ones in that word, any word with a single error in it will be detected. It will not be known where in the word the error is, however. If, in addition, after each stream of n words a parity sum is sent, each bit of which shows whether there were an odd or even number of ones at that bit-position sent in the most recent group, the exact position of the error can be determined and the error corrected. This method is only guaranteed to be effective, however, if there are no more than 1 error in every group of n words. With more error correction bits, more errors can be detected and in some cases corrected.
There are also other bit-grouping techniques.
Checksum[edit]
A checksum of a message is a modular arithmetic sum of message code words of a fixed word length (e.g., byte values). The sum may be negated by means of a ones’-complement operation prior to transmission to detect unintentional all-zero messages.
Checksum schemes include parity bits, check digits, and longitudinal redundancy checks. Some checksum schemes, such as the Damm algorithm, the Luhn algorithm, and the Verhoeff algorithm, are specifically designed to detect errors commonly introduced by humans in writing down or remembering identification numbers.
Cyclic redundancy check[edit]
A cyclic redundancy check (CRC) is a non-secure hash function designed to detect accidental changes to digital data in computer networks. It is not suitable for detecting maliciously introduced errors. It is characterized by specification of a generator polynomial, which is used as the divisor in a polynomial long division over a finite field, taking the input data as the dividend. The remainder becomes the result.
A CRC has properties that make it well suited for detecting burst errors. CRCs are particularly easy to implement in hardware and are therefore commonly used in computer networks and storage devices such as hard disk drives.
The parity bit can be seen as a special-case 1-bit CRC.
Cryptographic hash function[edit]
The output of a cryptographic hash function, also known as a message digest, can provide strong assurances about data integrity, whether changes of the data are accidental (e.g., due to transmission errors) or maliciously introduced. Any modification to the data will likely be detected through a mismatching hash value. Furthermore, given some hash value, it is typically infeasible to find some input data (other than the one given) that will yield the same hash value. If an attacker can change not only the message but also the hash value, then a keyed hash or message authentication code (MAC) can be used for additional security. Without knowing the key, it is not possible for the attacker to easily or conveniently calculate the correct keyed hash value for a modified message.
Error correction code[edit]
Any error-correcting code can be used for error detection. A code with minimum Hamming distance, d, can detect up to d − 1 errors in a code word. Using minimum-distance-based error-correcting codes for error detection can be suitable if a strict limit on the minimum number of errors to be detected is desired.
Codes with minimum Hamming distance d = 2 are degenerate cases of error-correcting codes and can be used to detect single errors. The parity bit is an example of a single-error-detecting code.
Applications[edit]
Applications that require low latency (such as telephone conversations) cannot use automatic repeat request (ARQ); they must use forward error correction (FEC). By the time an ARQ system discovers an error and re-transmits it, the re-sent data will arrive too late to be usable.
Applications where the transmitter immediately forgets the information as soon as it is sent (such as most television cameras) cannot use ARQ; they must use FEC because when an error occurs, the original data is no longer available.
Applications that use ARQ must have a return channel; applications having no return channel cannot use ARQ.
Applications that require extremely low error rates (such as digital money transfers) must use ARQ due to the possibility of uncorrectable errors with FEC.
Reliability and inspection engineering also make use of the theory of error-correcting codes.[16]
Internet[edit]
In a typical TCP/IP stack, error control is performed at multiple levels:
- Each Ethernet frame uses CRC-32 error detection. Frames with detected errors are discarded by the receiver hardware.
- The IPv4 header contains a checksum protecting the contents of the header. Packets with incorrect checksums are dropped within the network or at the receiver.
- The checksum was omitted from the IPv6 header in order to minimize processing costs in network routing and because current link layer technology is assumed to provide sufficient error detection (see also RFC 3819).
- UDP has an optional checksum covering the payload and addressing information in the UDP and IP headers. Packets with incorrect checksums are discarded by the network stack. The checksum is optional under IPv4, and required under IPv6. When omitted, it is assumed the data-link layer provides the desired level of error protection.
- TCP provides a checksum for protecting the payload and addressing information in the TCP and IP headers. Packets with incorrect checksums are discarded by the network stack and eventually get retransmitted using ARQ, either explicitly (such as through three-way handshake) or implicitly due to a timeout.
Deep-space telecommunications[edit]
The development of error-correction codes was tightly coupled with the history of deep-space missions due to the extreme dilution of signal power over interplanetary distances, and the limited power availability aboard space probes. Whereas early missions sent their data uncoded, starting in 1968, digital error correction was implemented in the form of (sub-optimally decoded) convolutional codes and Reed–Muller codes.[17] The Reed–Muller code was well suited to the noise the spacecraft was subject to (approximately matching a bell curve), and was implemented for the Mariner spacecraft and used on missions between 1969 and 1977.
The Voyager 1 and Voyager 2 missions, which started in 1977, were designed to deliver color imaging and scientific information from Jupiter and Saturn.[18] This resulted in increased coding requirements, and thus, the spacecraft were supported by (optimally Viterbi-decoded) convolutional codes that could be concatenated with an outer Golay (24,12,8) code. The Voyager 2 craft additionally supported an implementation of a Reed–Solomon code. The concatenated Reed–Solomon–Viterbi (RSV) code allowed for very powerful error correction, and enabled the spacecraft’s extended journey to Uranus and Neptune. After ECC system upgrades in 1989, both crafts used V2 RSV coding.
The Consultative Committee for Space Data Systems currently recommends usage of error correction codes with performance similar to the Voyager 2 RSV code as a minimum. Concatenated codes are increasingly falling out of favor with space missions, and are replaced by more powerful codes such as Turbo codes or LDPC codes.
The different kinds of deep space and orbital missions that are conducted suggest that trying to find a one-size-fits-all error correction system will be an ongoing problem. For missions close to Earth, the nature of the noise in the communication channel is different from that which a spacecraft on an interplanetary mission experiences. Additionally, as a spacecraft increases its distance from Earth, the problem of correcting for noise becomes more difficult.
Satellite broadcasting[edit]
The demand for satellite transponder bandwidth continues to grow, fueled by the desire to deliver television (including new channels and high-definition television) and IP data. Transponder availability and bandwidth constraints have limited this growth. Transponder capacity is determined by the selected modulation scheme and the proportion of capacity consumed by FEC.
Data storage[edit]
Error detection and correction codes are often used to improve the reliability of data storage media.[19] A parity track capable of detecting single-bit errors was present on the first magnetic tape data storage in 1951. The optimal rectangular code used in group coded recording tapes not only detects but also corrects single-bit errors. Some file formats, particularly archive formats, include a checksum (most often CRC32) to detect corruption and truncation and can employ redundancy or parity files to recover portions of corrupted data. Reed-Solomon codes are used in compact discs to correct errors caused by scratches.
Modern hard drives use Reed–Solomon codes to detect and correct minor errors in sector reads, and to recover corrupted data from failing sectors and store that data in the spare sectors.[20] RAID systems use a variety of error correction techniques to recover data when a hard drive completely fails. Filesystems such as ZFS or Btrfs, as well as some RAID implementations, support data scrubbing and resilvering, which allows bad blocks to be detected and (hopefully) recovered before they are used.[21] The recovered data may be re-written to exactly the same physical location, to spare blocks elsewhere on the same piece of hardware, or the data may be rewritten onto replacement hardware.
Error-correcting memory[edit]
Dynamic random-access memory (DRAM) may provide stronger protection against soft errors by relying on error-correcting codes. Such error-correcting memory, known as ECC or EDAC-protected memory, is particularly desirable for mission-critical applications, such as scientific computing, financial, medical, etc. as well as extraterrestrial applications due to the increased radiation in space.
Error-correcting memory controllers traditionally use Hamming codes, although some use triple modular redundancy. Interleaving allows distributing the effect of a single cosmic ray potentially upsetting multiple physically neighboring bits across multiple words by associating neighboring bits to different words. As long as a single-event upset (SEU) does not exceed the error threshold (e.g., a single error) in any particular word between accesses, it can be corrected (e.g., by a single-bit error-correcting code), and the illusion of an error-free memory system may be maintained.[22]
In addition to hardware providing features required for ECC memory to operate, operating systems usually contain related reporting facilities that are used to provide notifications when soft errors are transparently recovered. One example is the Linux kernel’s EDAC subsystem (previously known as Bluesmoke), which collects the data from error-checking-enabled components inside a computer system; besides collecting and reporting back the events related to ECC memory, it also supports other checksumming errors, including those detected on the PCI bus.[23][24][25] A few systems[specify] also support memory scrubbing to catch and correct errors early before they become unrecoverable.
See also[edit]
- Berger code
- Burst error-correcting code
- ECC memory, a type of computer data storage
- Link adaptation
- List of algorithms § Error detection and correction
- List of hash functions
References[edit]
- ^ a b «Masorah». Jewish Encyclopedia.
- ^ Pratico, Gary D.; Pelt, Miles V. Van (2009). Basics of Biblical Hebrew Grammar: Second Edition. Zondervan. ISBN 978-0-310-55882-8.
- ^ Mounce, William D. (2007). Greek for the Rest of Us: Using Greek Tools Without Mastering Biblical Languages. Zondervan. p. 289. ISBN 978-0-310-28289-1.
- ^ Mishneh Torah, Tefillin, Mezuzah, and Sefer Torah, 1:2. Example English translation: Eliyahu Touger. The Rambam’s Mishneh Torah. Moznaim Publishing Corporation.
- ^ Brian M. Fagan (5 December 1996). «Dead Sea Scrolls». The Oxford Companion to Archaeology. Oxford University Press. ISBN 0195076184.
- ^ Thompson, Thomas M. (1983), From Error-Correcting Codes through Sphere Packings to Simple Groups, The Carus Mathematical Monographs (#21), The Mathematical Association of America, p. vii, ISBN 0-88385-023-0
- ^ Shannon, C.E. (1948), «A Mathematical Theory of Communication», Bell System Technical Journal, 27 (3): 379–423, doi:10.1002/j.1538-7305.1948.tb01338.x, hdl:10338.dmlcz/101429, PMID 9230594
- ^ Golay, Marcel J. E. (1949), «Notes on Digital Coding», Proc.I.R.E. (I.E.E.E.), 37: 657
- ^ Gupta, Vikas; Verma, Chanderkant (November 2012). «Error Detection and Correction: An Introduction». International Journal of Advanced Research in Computer Science and Software Engineering. 2 (11). S2CID 17499858.
- ^ a b A. J. McAuley, Reliable Broadband Communication Using a Burst Erasure Correcting Code, ACM SIGCOMM, 1990.
- ^ Shah, Pradeep M.; Vyavahare, Prakash D.; Jain, Anjana (September 2015). «Modern error correcting codes for 4G and beyond: Turbo codes and LDPC codes». 2015 Radio and Antenna Days of the Indian Ocean (RADIO): 1–2. doi:10.1109/RADIO.2015.7323369. ISBN 978-9-9903-7339-4. S2CID 28885076. Retrieved 22 May 2022.
- ^ «IEEE SA — IEEE 802.11ac-2013». IEEE Standards Association.
- ^ «Transition to Advanced Format 4K Sector Hard Drives | Seagate US». Seagate.com. Retrieved 22 May 2022.
- ^ Frank van Gerwen. «Numbers (and other mysterious) stations». Archived from the original on 12 July 2017. Retrieved 12 March 2012.
- ^ Gary Cutlack (25 August 2010). «Mysterious Russian ‘Numbers Station’ Changes Broadcast After 20 Years». Gizmodo. Retrieved 12 March 2012.
- ^ Ben-Gal I.; Herer Y.; Raz T. (2003). «Self-correcting inspection procedure under inspection errors» (PDF). IIE Transactions. IIE Transactions on Quality and Reliability, 34(6), pp. 529-540. Archived from the original (PDF) on 2013-10-13. Retrieved 2014-01-10.
- ^ K. Andrews et al., The Development of Turbo and LDPC Codes for Deep-Space Applications, Proceedings of the IEEE, Vol. 95, No. 11, Nov. 2007.
- ^ Huffman, William Cary; Pless, Vera S. (2003). Fundamentals of Error-Correcting Codes. Cambridge University Press. ISBN 978-0-521-78280-7.
- ^ Kurtas, Erozan M.; Vasic, Bane (2018-10-03). Advanced Error Control Techniques for Data Storage Systems. CRC Press. ISBN 978-1-4200-3649-7.[permanent dead link]
- ^ Scott A. Moulton. «My Hard Drive Died». Archived from the original on 2008-02-02.
- ^ Qiao, Zhi; Fu, Song; Chen, Hsing-Bung; Settlemyer, Bradley (2019). «Building Reliable High-Performance Storage Systems: An Empirical and Analytical Study». 2019 IEEE International Conference on Cluster Computing (CLUSTER): 1–10. doi:10.1109/CLUSTER.2019.8891006. ISBN 978-1-7281-4734-5. S2CID 207951690.
- ^ «Using StrongArm SA-1110 in the On-Board Computer of Nanosatellite». Tsinghua Space Center, Tsinghua University, Beijing. Archived from the original on 2011-10-02. Retrieved 2009-02-16.
- ^ Jeff Layton. «Error Detection and Correction». Linux Magazine. Retrieved 2014-08-12.
- ^ «EDAC Project». bluesmoke.sourceforge.net. Retrieved 2014-08-12.
- ^ «Documentation/edac.txt». Linux kernel documentation. kernel.org. 2014-06-16. Archived from the original on 2009-09-05. Retrieved 2014-08-12.
Further reading[edit]
- Shu Lin; Daniel J. Costello, Jr. (1983). Error Control Coding: Fundamentals and Applications. Prentice Hall. ISBN 0-13-283796-X.
- SoftECC: A System for Software Memory Integrity Checking
- A Tunable, Software-based DRAM Error Detection and Correction Library for HPC
- Detection and Correction of Silent Data Corruption for Large-Scale High-Performance Computing
External links[edit]
- The on-line textbook: Information Theory, Inference, and Learning Algorithms, by David J.C. MacKay, contains chapters on elementary error-correcting codes; on the theoretical limits of error-correction; and on the latest state-of-the-art error-correcting codes, including low-density parity-check codes, turbo codes, and fountain codes.
- ECC Page — implementations of popular ECC encoding and decoding routines