
4.9.1. Вероятность символьной ошибки для модуляции MPSK
4.9.2. Вероятность символьной ошибки для модуляции MFSK
4.9.3. Зависимость вероятности битовой ошибки от вероятности символьной ошибки для ортогональных сигналов
4.9.4. Зависимость вероятности битовой ошибки от вероятности символьной ошибки для многофазных сигналов
4.9.5. Влияние межсимвольной интерференции
4.9.1. Вероятность символьной ошибки для модуляции MPSK
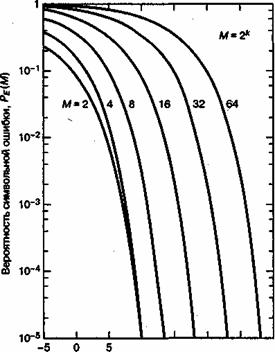
Для больших отношений сигнал/шум вероятность символьной ошибки ![]() для равновероятных сигналов в M-арной модуляции PSK с когерентным обнаружением можно выразить как [7]
для равновероятных сигналов в M-арной модуляции PSK с когерентным обнаружением можно выразить как [7]
 (4.105)
(4.105)
где ![]() — вероятность символьной ошибки,
— вероятность символьной ошибки, ![]() — энергия, приходящаяся на символ, а М = 2k — размер множества символов. Зависимость
— энергия, приходящаяся на символ, а М = 2k — размер множества символов. Зависимость ![]() от
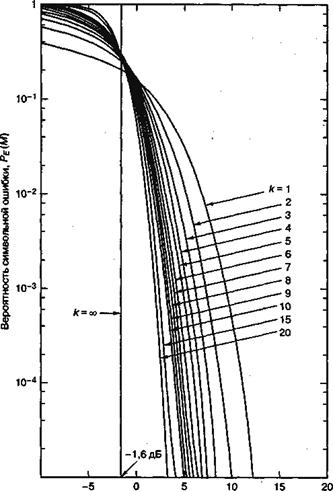
от ![]() для передачи сигналов MPSK с когерентным обнаружением показана на рис. 4.35.
для передачи сигналов MPSK с когерентным обнаружением показана на рис. 4.35.
![]()
Рис. 4.35. Вероятность символьной ошибки для многофазной передачи сигналов с когерентным обнаружением. (Перепечатано с разрешения авторов из W. С. Lindsey and M. К. Simon. Telecommunication Systems Engineering. Prentice-Hall, Inc., Engle-wood Cliffs, N. J., 1973.)
Вероятность символьной ошибки для дифференциального когерентного обнаружения М-арной схемы DPSK (для больших значений ![]() ) выражается подобно тому, как это было приведено выше [7].
) выражается подобно тому, как это было приведено выше [7].
 (4.106)
(4.106)
4.9.2. Вероятность символьной ошибки для модуляции MFSK
Вероятность символьной ошибки ![]() для равновероятных ортогональных сигналов с когерентным обнаружением можно выразить как [5]
для равновероятных ортогональных сигналов с когерентным обнаружением можно выразить как [5]
 (4.107)
(4.107)
где ![]() — энергия, приходящаяся на символ, а M — размер множества символов. Зависимость
— энергия, приходящаяся на символ, а M — размер множества символов. Зависимость ![]() от
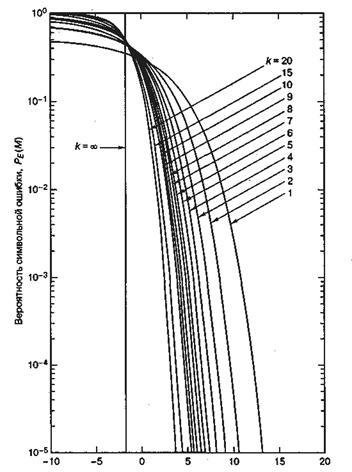
от ![]() для М-арных ортогональных сигналов с когерентным обнаружением показана на рис. 4.36.
для М-арных ортогональных сигналов с когерентным обнаружением показана на рис. 4.36.
Вероятность символьной ошибки для равновероятных М-арных ортогональных сигналов с некогерентным обнаружением дается следующим выражением [9].
 (4.108)
(4.108)
где
![]() (4.109)
(4.109)
является стандартным биномиальным коэффициентом, выражающим число способов выбора j ошибочных символов из М возможных. Отметим, что для бинарного случая формула (4. 108) сокращается до
 (4.110)
(4.110)
что совпадает с результатом, полученным в выражении (4.96). Кривая зависимости ![]() от
от ![]() для M-арной передачи сигналов с некогерентным обнаружением изображена на рис. 4.37. При сравнении данных графиков с приведенными на рис. 4.6 и соответствующими когерентному обнаружению можно заметить, что для k > 7 различием уже можно пренебрегать. В заключение отметим, что для когерентного и некогерентного приема ортогональных сигналов верхний предел вероятности ошибки дается выражением [9].
для M-арной передачи сигналов с некогерентным обнаружением изображена на рис. 4.37. При сравнении данных графиков с приведенными на рис. 4.6 и соответствующими когерентному обнаружению можно заметить, что для k > 7 различием уже можно пренебрегать. В заключение отметим, что для когерентного и некогерентного приема ортогональных сигналов верхний предел вероятности ошибки дается выражением [9].
 (4.111)
(4.111)
Здесь Es — энергия на символ, а М — размер алфавита символов.
![]()
Рис. 4.36. Вероятность символьной ошибки для М-арной ортогональной передачи сигналов с когерентным обнаружением. (Перепечатано с разрешения авторов из W. С. Lindsey and M. К. Simon. Telecommunication Systems Engineering. Prentice-Hall, Inc., Englewood Cliffs, N. J., 1973.)
4.9.3. Зависимость вероятности битовой ошибки от вероятности символьной ошибки для ортогональных сигналов
Можно показать [9], что соотношение между вероятностью битовой ошибки (РВ) и вероятностью символьной ошибки (РЕ) для ортогональных M-арных сигналов дается следующим выражением.
![]() (4.112)
(4.112)
![]()
Рис. 4.37. Вероятность символьной ошибки для М-арной ортогональной передачи сигналов с некогерентным обнаружением. (Перепечатано с разрешения авторов из W. С. Lindsey and М. К. Simon, Telecommunication Systems Engineering. Prentice-Hall, Inc., Engtewood Cliffs, N. J., 1973.)
В пределе при увеличении k получаем следующее.
![]()
![]()
Понять формулу (4.112) позволяет простой пример. На рис. 4.38 показан восьмеричный набор символов сообщения. Эти символы (предполагаемые равновероятными) передаются с помощью ортогональных сигналов, таких как сигналы FSK. При использовании ортогональной передачи ошибка принятия решения равновероятно преобразует верный сигнал в один из (М — 1) неверных. Пример на рисунке демонстрирует передачу символа, состоящего из битов 011. Ошибка с равной вероятностью может перевести данный символ в любой из оставшихся 2k— 1 = 7 символов. Отметим, что наличие ошибки еще не означает, что все биты символа являются ошибочными. Если (рис. 4.38) приемник решит, что переданным символом является нижний из указанных, состоящий из битов 111, два из трех переданных битов будут верными. Должно быть очевидно, что для недвоичной передачи РВвсегда будет меньше РЕ (РB и РЕ — средние частоты появления ошибок).
Рис. 4.38. Пример зависимости рв от ре
Рассмотрим любой из столбцов битов на рис. 4.38. Каждая битовая позиция на 50% заполнена нулями и на 50% — единицами. Рассмотрим первый бит переданного символа (правый столбец). Сколько существует возможностей появления ошибочного бита 1? Всего существует 2k— 1 =4 возможности (нули в столбце появляются в четырех местах) появления битовой ошибки; то же значение получаем для каждого столбца. Окончательное соотношение рв/ре Для ортогональной передачи сигналов в формуле (4.112) получается следующим образом: число возможностей появления битовой ошибки (2k-1) делится на число возможностей появления символьной ошибки (2k— 1). Для случая, изображенного на рис. 4.38, ![]() .
.
4.9.4. Зависимость вероятности битовой ошибки от вероятности символьной ошибки для многофазных сигналов
При передаче сигналов MPSK значение РВменьше или равно РЕ, так же как и при передаче сигналов MFSK. В то же время имеется и существенное отличие. Для ортогональной передачи сигналов выбор одного из (М- 1) ошибочных символов равновероятен. При передаче в модуляции MPSK каждый сигнальный вектор не является равноудаленным от всех остальных. На рис. 4.39, а показано восьмеричное пространство решений, где области решений обозначены 8-ричными символами в двоичной записи. При передаче символа (011) и появлении в нем ошибки наиболее вероятными являются ближайшие соседние символы, (010) и (100). Вероятность превращения символа (011) вследствие ошибки в символ (111) относительно мала. Если биты распределяются по символам согласно двоичной последовательности, показанной на рис. 4.39, а, то некоторые символьные ошибки всегда будут давать две (или более) битовые ошибки, даже при значительном отношении сигнал/шум.
а) б)
Рис. 4.39. Области решения в сигнальном пространстве MPSK: а) в бинарной кодировке; 6) в кодировке Грея
Для неортогональных схем, таких как MPSK, часто используется код преобразования бинарных символов в M-арные, такие, что двоичные последовательности, соответствующие соседним символам (сдвигам фаз), отличаются единственной битовой позицией; таким образом, при появлении ошибки в М-арном символе высока вероятность того, что ошибочным является только один из k прибывших битов. Кодом, обеспечивающим подобное свойство, является код Грея (Gray code) [7]; на рис/4.39, б для восьмеричной схемы PSK показано распределение битов по символам с использованием кода Грея. Можно видеть, что соседние символы отличаются одним двоичным разрядом. Следовательно, вероятность появления многобитовой ошибки при данной символьной ошибке значительно меньше по сравнению с некодированным распределением битов, показанным на рис. 4.39, а. Реализация подобного кода Грея представляет один из редких случаев в цифровой связи, когда определенная выгода может быть получена без сопутствующих недостатков. Код Грея — это просто присвоение, не требующее специальных или дополнительных схем. Можно показать [5], что при использовании кода Грея вероятность ошибки будет следующей.
![]() (4.113)
(4.113)
Напомним из раздела 4.8.4, что передача сигналов BPSK и QPSK имеет одинаковую вероятность битовой ошибки. Формула (4.113) доказывает, что вероятности символьных ошибок этих схем отличаются. Для модуляции BPSK РЕ = РВ, а для QPSK РЕ ![]() 2РВ. Точное аналитическое выражение вероятности битовой ошибки РB в восьмеричной схеме PSK, а также довольно точные аппроксимации верхнего и нижнего пределов РB для M-арной PSK при больших М можно найти в работе [10].
2РВ. Точное аналитическое выражение вероятности битовой ошибки РB в восьмеричной схеме PSK, а также довольно точные аппроксимации верхнего и нижнего пределов РB для M-арной PSK при больших М можно найти в работе [10].
4.9.5. Влияние межсимвольной интерференции
Обнаружение сигналов рассматривалось при наличии шума AWGN в предположении, что межсимвольная интерференция (intersymbol interference — ISI) отсутствует. Это упростило анализ, поскольку процесс AWGN с нулевым средним описывается единственным параметром — дисперсией. На практике обычно оказывается, что межсимвольная интерференция — это второй (после теплового шума) источник помех, которому необходимо уделять пристальное внимание. ISI может возникать вследствие использования узкополосных фильтров на выходе передатчика, в канале или на входе приемника. Результатом этой дополнительной интерференции является ухудшение достоверности передачи как для когерентного, так и некогерентного приема. Вычисление вероятности ошибки при ISI (помимо AWGN) является значительно более сложной задачей, поскольку в вычислениях будет фигурировать импульсная характеристика канала. Этот вопрос мы не рассматриваем; впрочем, для читателей, интересующихся данной темой, можно порекомендовать работы [11-16].
![]()
80
Любая отдельная ошибка в разряде приведёт к нарушению чётности в одном столбце и в одной из строк матрицы. Прямоугольный код может исправить любую единичную ошибку, поскольку расположение ошибки однозначно определяется пересечением строки и столбца, в которых была нарушена чётность. Вероятность ошибки сообщения для кода, который может исправить ошибочные комбинации, состоящие из t или менее ошибочных битов записывается как
|
n |
n |
)n j . |
|||||||
|
P |
(1 P |
(12.16) |
|||||||
|
P j |
|||||||||
|
M |
ош |
ош |
|||||||
|
j t 1 |
j |
Судить о положительном эффекте от кодирования можно на основе анализа графиков зависимостей вероятности ошибки на бит от отношения сигнал/шум, приведённых на рис. 12.6.
|
Рош |
|||||
|
2 |
1 |
||||
|
10–1 |
|||||
|
3 |
|||||
|
10–2 |
|||||
|
4 |
|||||
|
10–3 |
|||||
|
10–4 |
10 lg(Ec/N0), дБ |
||||
|
–4 |
–2 |
0 |
2 |
||
|
–6 |
кривая 1 – передача сигналами BPSK без помехоустойчивого кодирования; кривые 2–4 – передача сигналами BPSKс помехоустойчивым кодированием со скоростями Vк2 = 1,0; Vк3 = 0,3; Vк4 = 0
Рис. 12.6. Графики зависимостей вероятности ошибки на бит от отношения сигнал/шум для помехоустойчивости пакетов с использованием помехоустойчивых кодов
Анализ показывает, что выигрыш в отношении сигнал/шум при равной Рош на бит может достигать более десяти децибел, что указывает на прямую выгоду от применения.
Рассмотрим выигрыш от применения помехоустойчивого декодирования блоковых кодов при условии, что ошибки в радиоканале при приёме кодовых символов происходят независимо с вероятностью p0. Вероятность появления равно i ошибок в блоке из n символов подчиняется биномиальному закону из (12.13):
|
P |
i |
(1 p |
)n i . |
(12.17) |
||
|
C |
pi |
0 |
||||
|
i |
0 |
|||||
|
n |

81
Если при кодировании исправляются все ошибки кратности t и менее,
n
то вероятность ошибочного приёма кодовой комбинации Pk Pi . При
i t 1
числе ошибок в канале (t+1) и более они возникают случайно и будут в равной степени искажать как информационные, так и проверочные символы. Поэтому среднее значение вероятности ошибки в двоичном символе (бите)
|
n |
i |
1 |
||||
|
P |
P . |
(12.18) |
||||
|
n |
||||||
|
ош |
i t 1 |
i |
При малой вероятности ошибки в канале (p0 << 1), что имеет место на практике, можно ограничиться первым членом ряда и
|
2t 1 |
t 1 |
||||||
|
P |
C |
pt 1. |
|||||
|
ош |
n |
n |
0 |
||||
Вероятность ошибки p0 определяется аналогично вероятности ошибки при приёме сигнала без кодирования, но с учётом скорости используемого кода Vk =k/n. Например, при фазовой модуляции в радиоканале вероятность будет
|
1 |
1 |
(12.19) |
|||||||||
|
2E |
k/N |
n |
|||||||||
|
P |
|||||||||||
|
ош |
2 |
б |
0 |
где Eб – энергия, затрачиваемая на передачу одной двоичной единицы. Наиболее распространёнными типами блочных кодов, применяемых в
системах радиодоступа, являются коды Хэмминга, циклические коды РидаСоломона, редко применяются коды Боуз–Чоудхури–Хоквингема (БЧХ).
Коды Хэмминга имеют структуру
(n,k) = (2m–1, 2m–m–1),
где т = 2,3,… . Минимальное расстояние для кода Хэмминга dmin = 3, поэтому он способен исправлять любую одиночную ошибку или обнаруживать две.
Коды БЧХ относятся к циклическим и имеют структуру
(n,k) = (2m–1, 2m–mt–1),
где т = 3,4,… . Минимальное расстояние dmin 2t+1 позволяет исправлять любые комбинации из t и менее ошибок. Коды БЧХ достаточно разнообразны и допускают при фиксированном значении длины кодовой комбинации n = 2m–1 несколько вариантов исправляющей способности кода. Например, при п = 15 может быть три варианта кода с t = 1,2,3; а при п = 255 – 33 варианта кода с исправляющей способностью t от 1 до 63.
Наиболее часто применяемым в цифровых системах радиодоступа является код Рида–Соломона. Кодом Рида–Соломона называется групповой линейный недвоичный циклический (n,k)-код, построенный над расширенным полем Галуа, исправляющий ошибки кратности t = (n–k)/2. Параметры кода n = m(2m–1), k = m(2m–1)–2mt. Минимальное расстояние
dmin = m(2t+1),
где т – число бит в одном недвоичном символе.

82
Свою популярность коды Рида-Соломона (РС) получили благодаря удобству исправления пакетов ошибок длиной т. На базе классического кода Рида-Соломона формируется большое количество производных: расширенных и укороченных кодов, которые легко адаптируются к конкретной длине сообщения.
На рис. 12.7 приведены графики зависимостей Pош от отношения сиг-
нал/шум h02 для различных типов помехоустойчивых кодов.
Коды Хэмминга (кривые 2,3) обеспечивают выигрыш всего несколько децибел, но при этом являются наиболее простыми в реализации. Наибольший выигрыш в энергетике обеспечивают коды Рида–Соломона (кривые 6,7). Коды БЧХ занимают промежуточное положение.
|
10–2 |
Pош |
|||||
|
1 |
||||||
|
10–3 |
2 |
|||||
|
3 |
||||||
|
10–4 |
||||||
|
6 |
4 |
|||||
|
10–5 |
||||||
|
10–6 |
7 |
5 |
||||
|
4 |
6 |
8 |
10 |
12 |
10 lg h2 |
, дБ |
|
0 |
кривая 1 – сигнал BPSK без кодирования; кривые 2,3 – сигнал BPSK с кодом Хэмминга
(7,4) и (15,11); кривые 4,5 – сигнал BPSK с кодом БЧХ (127,36) и (127,64);
кривые 6,7 – сигнал MFSK (М = 32)с кодом РС n = 31, t = 8 и 4
Рис. 12.7. Зависимость Pош от отношения сигнал/шум h02 для различных типов помехоустойчивых кодов
Перемежение представляет собой эффективный метод борьбы с группирующимися ошибками в канале с замираниями. Идея метода заключается в «рассеянии» символов кодового слова: символы должны находиться друг от друга на таком расстоянии, чтобы быть подверженными независимым замираниям. При независимых замираниях символы, поражённые пакетом ошибок, принадлежат различным кодовым словам. Поэтому влияние пакета ошибок распределяется по всему сообщению, и появляется возможность восстановить данные с помощью исходного кода, исправляющего ошибки.
Известно несколько типов перемежителей, реализующих диагональное, свёрточное, межблоковое и блоковое перемежение. Наиболее простым из четырёх типов перемежителей является блоковый, в котором l кодовых слов исходного кода размещаются в виде l строк прямоугольной матрицы, а их считывание для передачи осуществляется по столбцам, как показано на рис. 12.8. Каждое кодовое слово содержит n символов (k информационных и

83
n–k избыточных символов). Прямоугольная таблица содержит l кодовых слов. Параметр l называется глубиной перемежения. Независимо от начала возникновения пакета ошибок длиной l он будет поражать только один символ каждой строки. Таким образом, если исходный код обладает способностью исправлять одиночные ошибки в пределах кодового слова, то код с перемежением будет исправлять одиночные пакеты ошибок длиной l или менее. Если же исходный код может исправлять одиночные пакеты ошибок длиной t и менее, то код с перемежением будет исправлять одиночные пакеты длиной lt или менее.
l
n–k k
Рис. 12.8. Передача кода с блоковым перемежением
Преимущество свёрточных кодов по отношению к блочным заключается в непрерывном обнаружении и исправлении ошибок. Свёрточный код задаётся тремя параметрами: n, k и K. Код (n, k, K) генерирует n бит выходной последовательности из k входных бит. Для формирования выходной последовательности используется K*k входных бит.
В каждый i-й тактовый момент времени на вход кодирующего устройства поступает (параллельно) k0 символов сообщения, а с выхода снимается n0 символов, соответствующих входным. Выходные символы формируются с помощью рекуррентных соотношений из K информационных символов, поступивших в данный и предшествующие моменты времени. Величина K называется длиной кодового ограничения и играет ту же роль, что и длина блочного кода.
Свёрточный код имеет избыточность R = 1–k0/n0 = 1–Vk, где Vk – скорость кода, и обозначается как (k0/n0). Типичными являются скорости кода
Vk = 1/n0 (например, Vk = 1/2) и Vk = n–1/n (например, Vk = 2/3). При Vk = 2/3 на вход кодирующего устройства одновременно поступают k0 = 2 информационных символа, а снимается n0 = 3 кодовых символа.
Корректирующая способность свёрточного кода зависит от так называемого свободного расстояния, которое по существу содержит ту же информацию о коде, что и кодовое расстояние для блоковых кодов.

84
Свёрточные коды находят применение в системах связи. Для декодирования свёрточного кода при небольших значениях длины кодового ограничения (K = 3, 5, 7) целесообразно использование алгоритма максимального правдоподобия, предложенного А. Витерби. Декодирующее устройство при этом оказывается достаточно простым, реализуя в то же время высокую помехоустойчивость.
Исследования показывают, что применение свёрточных кодов при фиксированной вероятности ошибки p = 10–5 позволяет получить энергетический выигрыш 4…6 дБ по сравнению с системой, использующей фазомодулированные сигналы без кодирования.
На рис. 12.9 приведены графики зависимостей Pош от h02 , позволяющие судить о возможностях свёрточных кодов. В сравнении со случаем без кодирования и использованием сигнала BPSK (кривая 1) выигрыш зависит от схемы принятия решения (жёсткая или мягкая) при приёме, от скорости кодирования Vк и количества блоков K, учитываемых при формировании выходной кодовой комбинации длиной n.
|
10–2 |
Pош |
|||||
|
10–3 |
||||||
|
2 |
1 |
|||||
|
10–4 |
||||||
|
3 |
4 |
|||||
|
10–5 |
||||||
|
10–6 |
||||||
|
2 |
4 |
6 |
8 |
10 10 lg h2 |
, дБ |
|
|
0 |
кривая 1 – сигнал BPSK без кодирования; кривая 2 – Vк = 1/3, К = 41 (жёсткое решение); кривая 3 – Vк = 1/3, К = 7 (мягкое решение); кривая 4 – Vк = 1/2, К = 7 (жёсткое решение)
Рис. 12.9. Зависимость Pош от отношения сигнал/шум h02
Турбокоды (ТК) впервые были введены в 1993 году. С их использованием достигается вероятность появления ошибок 10–5 при скорости кодирования 1/2 и модуляции BPSK в канале с белым аддитивным гауссовым шумом с Eb/N0, равным 0,7 дБ. Коды образуются посредством компоновки двух или более составных кодов, являющихся разными вариантами чередования одной и той же информационной последовательности. Для свёрточных кодов декодер выдаёт жёстко декодированные символы, в каскадной схеме, такой как турбокод, для хорошей работы алгоритм декодирования применяет мягкую схему декодирования, вместо жёсткой. Для систем с турбодекодированием, декодирование заключается в том, чтобы передать мягкую схему при-

85
нятия решений с выхода одного декодера на вход другого и повторять эту процедуру до тех пор, пока не будут получены надёжные решения.
На рис. 12.10 приведены графики зависимостей Pош от h02 , позволяющие оценить эффект от применения турбокодов. В частности, вероятность ошибки Pош = 10–5 достигается при 10 lgh02 = 0,7 дБ (кривая 2). Для сравнения на рис. 12.10 приведён график зависимости Pош от h02 для сигналов BPSK без кодирования.
Pош
10–1
1
10–2
2
10–3
10–4
10–5
|
2,5 |
3 |
4,5 |
6 10 lg h2 |
, дБ |
|
0 |
Рис. 12.10. Зависимость Pош от отношения сигнал/шум h02
Турбокоды являются одним из наиболее мощных средств повышения помехоустойчивости среди методов кодирования.
Компаниями France Telecom и Telediffusionde France запатентован ши-
рокий класс турбокодов. Более того, турбокоды утверждены для помехоустойчивого кодирования несколькими стандартами космической связи, а также мобильной связи третьего поколения.
Схема кодирования с кодерами на 16 состояний (K = 5), максимальной длиной перемежения 16384 и кодовыми скоростями r = 1/2,1/3,1/4,1/6 утвер-
ждена в 1999 г. американским комитетом CCSDS (Consultative Committee for Space Data Systems) в стандарте передачи телеметрической информации с космических аппаратов. В феврале 2000 г. консорциум DVB утвердил ТК в стандарте DVB-RCS для передачи информации по обратному спутниковому каналу (Return Channel for Satellite – RCS), т. е. в направлении от спутника к абоненту. ТК формируются на основе циклического рекурсивного система-
тического свёрточного кодера (Circular Recursive Systematic Convolutional– CRSC). Использование стандарта совместно с вещательным стандартом DVB-S позволяет проектировать полноценную широкополосную систему спутникового интерактивного цифрового телевидения. Компанией TurboConcept в партнёрстве с европейским спутниковым оператором Eutelsat разработан турбо-декодер TC1000 в соответствии со стандартом DVB-RCS.
86
Использование ТК принято также в новом стандарте спутниковой системы связи Inmarsat.
Применение многопозиционной модуляции КАМ и MSPK в чистом виде сопряжено с проблемой недостаточной помехоустойчивости. Поэтому во всех современных высокоскоростных протоколах КАМ используется совместно с решётчатым кодированием – специальным видом свёрточного кодирования. В результате появился новый способ модуляции, называемый треллисмодуляцией (Trellis Coded Modulation – ТСМ). Выбранная определённым образом комбинация конкретной КАМ и помехоустойчивого кода в отечественной технической литературе носит название сигнально-кодовой конструкции (СКК). СКК позволяют повысить помехозащищённость передачи информации наряду со снижением требований к отношению сигнал/шум в канале на 3–6 дБ. При этом число сигнальных точек увеличивается вдвое за счёт добавления к информационным битам одного избыточного, образованного путём свёрточного кодирования. Расширенный таким образом блок битов подвергается всё той же КАМ. В процессе демодуляции производится декодирование принятого сигнала по алгоритму Витерби. Именно этот алгоритм за счёт использования введённой избыточности и знания предыстории процесса приёма позволяет по критерию максимального правдоподобия выбрать из сигнального пространства наиболее достоверную эталонную точку.
Выбор способов модуляции и кодирования сводится к поиску такого заполнения сигнального пространства, при котором обеспечивается высокая скорость и высокая помехоустойчивость. Комбинирование различных ансамблей многопозиционных сигналов и помехоустойчивых кодов порождает множество вариантов сигнальных конструкций. Согласованные определённым образом варианты, обеспечивающие улучшение энергетической и частотной эффективности, и являются сигнально-кодовыми конструкциями. Задача поиска наилучшей СКК является одной из наиболее сложных задач теории связи.
Все применяемые сегодня СКК используют свёрточное кодирование со скоростью (n – 1/n), т. е. при передаче одного сигнального элемента используется только один избыточный двоичный символ.
Типичный кодер, применяемый совместно с модулятором ФМ-8 представлен на рис. 12.11. Он является свёрточным кодером с относительной скоростью кода, равной 2/3. Каждым двум информационным битам на входе кодер сопоставляет трёхсимвольные двоичные блоки на своём выходе, которые и поступают на модулятор ФМ-8.

87
|
элемент задержки |
||
|
на один такт |
||
|
c1 |
||
|
c0 |
||
|
ci |
||
К модулятору ФМ-8
Рис. 12.11. Схема свёрточного 2/3 кодера
Применение сигналов ФМ связано с разрешением проблемы неоднозначности фазы восстановленной на приёме несущей. Данная проблема решается за счёт относительного (дифференциального) кодирования, что в системах без помехоустойчивого кодирования приводит к размножению ошибок. В системах с помехоустойчивым кодированием относительное кодирование также используется. В этом случае имеет значение последовательность включения относительного и помехоустойчивого кодера.
Известно несколько видов СКК, обеспечивающих прозрачность к неопределённости фазы восстановленной несущей. Они также основаны на свёрточном кодировании со скоростью (n–1/n).
Использование методов кодирования совместно с методами модуляции даёт мощный арсенал средств, который способен подобрать оптимальное сочетание кода и вида модуляции, обеспечивающих максимальную эффективность радиолинии.
Для иллюстрации на рис. 12.12 приведены графики зависимостей скорости передачи информации от отношения сигнал/шум на входе приёмника. Анализ приведённых кривых показывает, что при различных отношениях сигнал/шум максимальное значение пропускной способности обеспечивает, например при h02 = 12 дБ, сочетание сигнала QPSK с кодом со скоростью
Vк = 3/4, а при h02 = 16 дБ – сигнала 16QAM и код со скоростью Vк = 1/2.

|
88 |
|||||
|
= V/c |
|||||
|
1 |
4 |
||||
|
0,75 |
|||||
|
3 |
|||||
|
0,5 |
|||||
|
2 |
|||||
|
0,25 |
|||||
|
1 |
10 lg h2 |
, дБ |
|||
|
0 |
0 |
||||
|
12 |
16 |
20 |
24 |
||
|
8 |
кривая 1 – QPSK с кодом Vк = 1/2; кривая 2 – QPSK с кодом Vк = 3/4; кривая 3 – 16QAM
с кодом Vк = 1/2; кривая 4 – 16QAM с кодом Vк = 3/4;
Рис. 12.12. Зависимость эффективности использования пропускной способности канала связи от вида кодирования и способа модуляции
Поэтому в современных системах радиодоступа реализован режим адаптации вида модуляции и способа кодирования с целью максимизации пропускной способности индивидуально для каждой БС и (если это возможно) для каждой АС.

89
Лекция 13 ИНФОРМАЦИОННЫЕ ХАРАКТЕРИСТИКИ КАНАЛОВ СВЯЗИ
Основными информационными характеристиками каналов связи являются скорость передачи информации и пропускная способность каналов связи.
Скорость передачи информации вводится как количество информации, получаемое на выходе канала связи в единицу времени
V VM (H(X ) H(X /Y));
при отсутствии помех
V VM H (X ).
Мы всегда стремимся максимизировать скорость передачи информа-
ции V max.
Рассмотрим для примера задачу Шеннона.
|
p(x ) p(x |
) |
1 |
; p + q = 1; q |
p |
– матрица переходов; |
|||||||||||||||||||||||||||||
|
2 |
||||||||||||||||||||||||||||||||||
|
1 |
2 |
|||||||||||||||||||||||||||||||||
|
p |
q |
|||||||||||||||||||||||||||||||||
|
I(X,Y) H(X) H(X /Y); |
||||||||||||||||||||||||||||||||||
|
1 |
1 |
1 |
1 |
log2 1. |
||||||||||||||||||||||||||||||
|
H(X) |
log |
log |
||||||||||||||||||||||||||||||||
|
2 |
||||||||||||||||||||||||||||||||||
|
2 |
2 |
2 |
||||||||||||||||||||||||||||||||
|
Потерянная информация: |
||||||||||||||||||||||||||||||||||
|
H(X /Y) |
1 |
(plog p plogq) |
1 |
(qlog q qlog p) plog |
1 |
qlog |
1 |
, |
||||||||||||||||||||||||||
|
2 |
2 |
p |
q |
|||||||||||||||||||||||||||||||
|
откуда (рис. 13.1): |
1 |
1 |
1 |
1 |
||||||||||||||||||||||||||||||
|
IY |
(X) 1 plog |
qlog |
1 (1 q)log |
qlog |
, |
|||||||||||||||||||||||||||||
|
тогда получим: |
p |
q |
1 q |
q |
||||||||||||||||||||||||||||||
|
1 |
1 |
|||||||||||||||||||||||||||||||||
|
V |
V |
1 plog |
qlog |
. |
||||||||||||||||||||||||||||||
|
и |
M |
p |
q |
|||||||||||||||||||||||||||||||
IY(X)
1

Рис. 13.1. Зависимость переданной информации от вероятности ошибки
.
Максимальное количество переданной информации, взятое по всевозможным источникам с распределением сигналов p(xi) называется пропускной
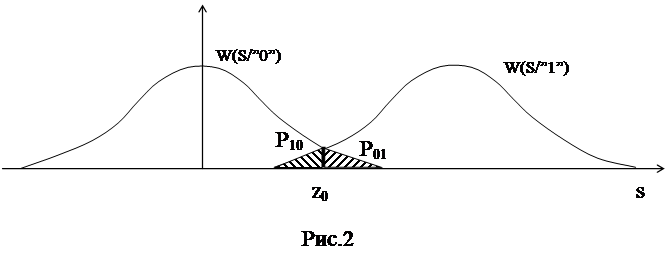
Вероятности
ошибок ![]() зависят от отношения сигнал/шум q, а также
зависят от отношения сигнал/шум q, а также
от величины порога z0. Для равновероятного источника порог
выставляется симметрично, таким образом, чтобы добиться равных вероятностей
перепутывания ![]() . В таком случае вероятность
. В таком случае вероятность
ошибки равна просто вероятности перепутывания символов ![]() .
.
В
системе с амплитудной модуляцией вероятность ошибки равна
![]()
Данная
величина ошибки достигается для равновероятного источника при оптимальной
величине порога z0=Э/2.
 |
При
моделировании системы передачи информации производится экспериментальное
определение вероятности ошибки. По классическому определению вероятностью
события А называется отношение количество экспериментов, в которых событие А
произошло, к общему количеству экспериментов
В
нашем случае отношение ошибочно переданных символов к общему количеству принятых
символов.
При
конечном количестве экспериментов N<¥ мы имеем дело с
оценкой вероятности. При этом оцененная величина вероятности ошибки сама
является случайной величиной. Для уменьшения ошибки измерения необходимо
увеличивать объём эксперимента. Количество испытаний зависит от порядка
вероятности, которую необходимо измерить, и от допустимой величины погрешности:

где
![]() — допустимая погрешность, P –оцениваемая
— допустимая погрешность, P –оцениваемая
вероятность. Очевидно, что чем меньшего порядка вероятность мы хотим измерить,
и с чем большей точностью, тем больше необходимый объём эксперимента.
Описание пакета «Математика», и используемых
подпрограмм
Пакет «Математика» является мощным комплексом
для проведения инженерных и научных вычислений. Программирование в
«Математике» осуществляется на Си – подобном языке. Всё поле
программы поделено на ячейки, каждая из которых ограничена скобкой справа.
Запуск ячейки на выполнение производится нажатием клавиш Shift+Enter. Основными
объектами на рабочем поле являются а) текст программы б) результат вычислений в) графики, рисунки, диаграммы и пр.
Система передачи информации смоделирована с помощью набора
подпрограмм, каждая из которых реализует то или иное преобразование сигнала:
1. datasource[ ]
– генератор бинарного равновероятного сообщения длиной 60 бит, длительность
одной информационной посылки 1мсек;
2. modulatorAM[u,f]
– генератор амплитудно – манипулированного сигнала амплитудой 1 вольт, u
– модулирующее сообщение, f – несущая частота, может принимать значения
от 1 до 40 кГц.
3. noise[s,q]
– канал передачи, осуществляет зашумление сигнала s аддитивным
гауссовским шумом, с отношением сигнал/шум равным q на выходе канала;
4. optimfilter[s,f]
–блок оптимальной фильтрации, реализует оптимальный фильтр, согласованный с
сигналом s по форме, и настроенный на частоту f;
5. detector[s]
– амплитудный детектор сигнала s;
6. threshold[s,z]
– пороговое устройство, сравнивает сигнал s с порогом z;
7. signalview[s,t1,t2]
– оператор просмотра сигнала s на промежутке времени от момента t1
до момента t2 миллисекунд;
8. dataview[u,n1,n2] – оператор просмотра бинарного сообщения u от бита n1 до бита n2.
Любая строка в пакете «Математика» должна
заканчиваться точкой с запятой, в противном случае на экран выводится результат
вычисления.
Домашнее задание:
1. определить
необходимый объём эксперимента для измерения вероятности ошибки в пределах 0.1
до 0.9 с погрешностью не более 5%.
2. определить
оптимальную величину порога для равновероятного источника
Лабораторное задание
1. Запустить
программу «Математика» и реализовать когерентную СПИ с помощью
имеющихся подпрограмм.
2. Пронаблюдать и
зарисовать сигнал во всех точках системы передачи информации: а) на выходе источника сообщения б) на выходе модулятора или
на выходе канала в) после согласованного
фильтра при отношении сигнал/шум q=100.
3. Измерить
зависимость вероятности ошибки от величины отношения сигнал/шум при а) оптимальном пороге б) пороге больше оптимального в) пороге ниже оптимального
4. Исследовать
величину ошибки при оптимальном пороге и частотной расстройке согласованного
фильтра.
5. Выполнить пункты
1-5 для некогерентной системы
Контрольные вопросы:
1. Структура и
принцип работы системы передачи информации с амплитудной модуляцией
2. Критерии выбора
оптимального порога z0
3. Основное отличие
когерентной системы передачи информации от некогерентной.
4. От чего зависит вероятность
ошибки в системе, каким образом можно её уменьшить.
5. От чего зависит
точность измерения случайных величин при моделировании СПИ.
6. В каких случаях
возникает необходимость в применении некогерентной системы обработки сигнала.
1 Цель работы
1.1 Изучение
методики экспериментального исследования
помехоустойчивости приема сигналов
цифровых модуляций.
1.2 Экспериментальное
исследование помехоустойчивости прием
сигналов АМ-2, ЧМ-2, ФМ-2, ОФМ-2 и ФМ-4.
2 Ключевые положения
2.1 На
вход демодулятора поступает сумма
переданного модулированного сигнала
s(t)
и помехи n(t):
z(t)
= s(t)
+ n(t).
По сигналу z(t)
демодулятор должен восстановить цифровой
сигнал. Сигнал цифровой модуляции s(t)
– это последовательность импульсных
элементарных сигналов, которые отображают
цифровой сигнал и следуют через тактовый
интервал Т:
![]()
,
(5.1)
где
si(t),
и = 0, …, М
– 1 – элементарные сигналы (импульсы);
М
– число элементарных сигналов, в двоичных
видов модуляции М
= 2;
![]()
– i-й
импульс, который передается на k-м
тактовом интервале.
Демодулятор
на каждом тактовом интервале выносит
решение о номере переданного элементарного
сигнала и выдает набор с n
= log2M
бит, который отвечают сигналу с этим
номером. Критерием оптимальности
демодулятора является минимум вероятности
ошибки бита (двоичного символа) цифрового
сигнала.
2.2 Оптимальный
демодулятор реализует потенциальную
помехоустойчивость элементарных
сигналов, которые используются.
Потенциальная помехоустойчивость
произвольных двоичных равновероятных
сигналов при условии, что помеха n(t)
– белый гауссовский шум, выражается
формулой для вероятности ошибки сигнала
Pош
(2) = 0,5 –
![]()
=
![]()
, (5.2)
где
d
– расстояние между сигналами;
N0
– удельная мощность шума;![]()
и
![]()
– (5.3)
разные
формы записи интеграла вероятности (в
математической и научно-технической
литературе Украины преимущественно
используется функция Ф0(x),
которую еще называют функцией Лапласа).
В
двоичных системах передачи вероятность
ошибки бита р
= Рош(2).
Функция
Ф0(x)
монотонно возрастающая. Поэтому, чем
больший аргумент функции, тем меньшая
вероятность ошибки. Очевидно, что, чем
меньшая удельная мощность шума N0,
тем меньшая вероятность ошибки. Увеличение
расстояния между сигналами d
приводит к уменьшению вероятности
ошибки. Значение d
определяется с сигнального созвездия
модулированного сигнала и выражается
через энергию сигнала, который
затрачивается на передачу одного бита
Еб.
Энергию на бит можно выразить через
среднюю мощность сигнала Ps
и продолжительность битового интервала
Тб
или скорость цифрового сигнала R,
что передается:
Еб
= PsТб
= Ps/R. (5.4)
2.3 В
случае многопозиционных сигналов (М
> 2) вероятность ошибки сигнала выражают
суммой вероятностей ошибки в двоичных
системах, образованных элементарным
сигналом, который рассматривается, и
сигналами, переход в как наиболее
возможные. Итак, и в случае многопозиционных
сигналов вероятность ошибки сигнала
зависит от N0
и d.
Перерасчет вероятности ошибки сигнала
в вероятность ошибки бита проводится
с учетом манипуляционого кода. В табл.
5.1 для методов модуляции, которые
рассматриваются в лабораторной работе,
приведенные: сигнальные созвездия,
расстояния между сигналами и выражения
для вероятности ошибки бита. Для
компактной записи формул вероятности
ошибки бита введены обозначения
![]()
– отношение энергии, которая расходуется
на передачу одного бита, к удельной
мощности шума (коротко – отношение
сигнал/шум). Формула вероятности ошибки
бита при ОФМ-2 записанная с учетом того,
что при относительном декодировании
количество ошибок удваивается: рОФМ-2
= 2рФМ-2,
что верно, если рФМ-2
<< 1.
Таблица
5.1 – Характеристики
сигналов, которые определяют их
помехоустойчивость
|
Метод |
АМ-2 |
ЧМ-2 |
ФМ-2 |
ОФМ-2 |
ФМ-4 |
|
созвездие |
|||||
|
Расстояние сигналами d |
|
|
|||
|
Вероятность ошибки бита p |
0,5 |
0,5 |
0,5 |
1 |
0,5 |




2.4 Для
удобства определения вероятности ошибки
бита р
при заданном отношении сигнал/шум
![]()
или необходимого отношения сигнал/шум
при заданной вероятности ошибки бита
строят зависимость р
= f
(
), образец которой приведен на рис. 5.1.
Во время построения графика значения
отношение сигнал/шум принято выражать
в децибелах и использовать для них
линейный масштаб. Следует помнить, что
в формулах для вероятности ошибки
величина hб
предоставлена в разах. Переходы выполняют
по формулам
(5.5)
Графики
зависимости вероятности ошибки бита
от отношения сигнал/шум р
= f
(
) строят с использованием логарифмического
масштаба для вероятности ошибки р,
как показано на рис. 5.1.
2
.5 Экспериментально
определяется относительная частота
ошибки бит, которую коротко называют
частотой ошибки или коэффициентом
ошибок
Кош
ош
общ,
(5.6)
где общ
– число бит, переданных за время
наблюдения Tнаб;
Nош
– число по ошибке принятых бит за время
Tгаб.
Вероятность
ошибки и коэффициент ошибок совпадают
при бесконечно значительном числе
испытаний (то есть количество переданных
бит общ)
Время
наблюдения (ли общ)
выбирается довольно большим, чтобы
коэффициент ошибок практически давал
значения вероятности ошибки. Считают,
что такое приближение имеет место при
Nош
20.
2.6
Отношение сигнал/шум с учетом соотношения
(5.4) можно подать как
![]()
,
(5.7)
где
Ps
и Pn
– средние мощности сигнала и шума на
входе демодулятора;
Fк
– ширина спектра шума, которая равняется
ширине полосы частот канала связи.
Итак,
для измерения отношения сигнал/шум
необходимо измерить мощность сигнала
и шума квадратичным вольтметром и
выполнить вычисления по формуле (5.7) при
известных величинах Fк
(Гц) и R
(бит/с).
2.7
Полоса частот канала связи Fк
должна быть согласована с шириной
спектра сигнала Fs:
Fк
Fs.
Ширина спектра (Гц) сигналов цифровых
видов модуляции определяется в случае
ФМ-М,
ОФМ-М
и АМ-2
![]()
,
(5.8)
а в случае ЧМ-2
Fs
= 2R(1+), (5.9)
где
– коэффициент
расширения (закругление) спектра,
0 1,
типичные значения = 0,15……0,35
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
10.02.2016107.75 Кб73.docx
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Отношение сигнал шум бывает разный, по мощности SNR (signal to noise ratio) который мы рассмотрели вот в этой статье “Отношение сигнал/шум Гаусс” это отношение средней мощности сигнала к средней мощности шума.

В цифровых система связи в основном применяют другое отношение сигнал/шум – отношение сигнал/шум на бит Eb/No, где Eb это отношение энергии бита к спектральной плотности мощности шума No. Под энергией бита Eb подразумевается энергия сигнала за длительность бита. SNR=Ps/PN
Между SNR и Eb/No существует связь. По своей сути Eb/No представляет собой SNR, нормированное на ширину полосы W и битовую скорость R. Чтобы преобразовать одно выражение в другое необходимо среднюю мощность сигнала PS выразить через энергию бита Eb и битовую скорость R. Мощность – это энергия, деленная на время. В данном случае PS это энергия бита Eb, деленная на длительность бита Tb.
Если расписать среднюю мощность сигнала. Мощность – это энергия, деленная на время. В качестве энергии возьмем энергию бита Eb, деленная на длительность бита Tb. Мощность – это энергия, деленная на время. В данном случае Ps это энергия бита Eb, деленная на длительность бита Tb. Ps=Eb/Tb
Длительность бита Tb и битовая скорость R взаимно обратны, и Tb можно заменить на 1/R. Тогда это выражение можно переписать в следующем виде: Ps=Eb/R
Распишем среднюю мощность шума PN. Средняя мощность белого гауссовского шума бесконечна! А чтобы она стала конечной необходимо ограничить полосу шума. Поэтому под средней мощностью шума PN в данном случае подразумевается та мощность шума, которая попадает в полосу фильтра приемника (фильтра основной селекции).

Определим среднюю мощность шума PN как произведение спектральной плотности мощности белого гауссовского шума No на ширину полосы пропускания идеального прямоугольного фильтра W (см. рисунок выше): Pn=W·N0.
Отношение сигнал/шум по мощности SNR можно переписать в следующем виде: SNR=Eb·R/N0·W
И битовая скорость R, и полоса пропускания фильтра W имеют размерность Гц. Таким образом, отношение сигнал/шум на бит Eb/No – это SNR, нормированное по битовой скорости R и полосе пропускания фильтра W.
На рисунке ниже представлена зависимость вероятности битовой ошибки от отношения сигнал/шум: на левом графике от SNR, на правом от Eb/No.

Для начала рассмотрим левый график. На графиках представлены зависимости для трех разных битовых скоростей. Средняя мощность сигнала во всех случаях одинаковая.
Пусть начальная битовая скорость равна R бит/с (красная кривая). Если битовую скорость увеличить в 2 раза (2R бит/с), то кривая сместится правее (синяя кривая). Это объясняется тем, что энергия бита Eb уменьшается в 2 раза, так как равенство Ps=Eb·R сохраняется, следовательно, если битовая скорость увеличивается 2 раза, то энергия бита уменьшается в 2 раза. А энергия бита в свою очередь напрямую определяет вероятность битовой ошибки.
Если битовую скорость R уменьшить в 2 раза, не изменяя среднюю мощность сигнала, то энергия бита Eb увеличиться в 2 раза (желтая кривая). Это приводит к смещению кривой влево, и следовательно, увеличению помехоустойчивости. Чем ниже скорость передачи данных, тем лучше помехоустойчивость.
Рассмотри теперь правый график. На графике представлены все три случая: три разных битовых скорости, но мы видим только одну кривую. Дело в том, что при переходе от SNR к Eb/No мы отвязались от битовой скорости. По этой причине, вне зависимости от битовой скорости, зависимость вероятности битовой ошибки от Eb/No будет представляться одной кривой. Данная кривая определяется только модуляцией и приемником (оптимальный приемник или нет; когерентный прием или нет и т.д.).
Отношение сигнал/шум для цифровых систем
Отношение Eb/No можно рассматривать как величину, позволяющую сравнивать различные модуляции, помехоустойчивое кодирование, приемники и т.д. в отрыве от конкретных скоростей передачи.
Вывод выражения для Eb/No был сделан исходя из того, что приемный фильтр является прямоугольным с полосой W. Данное условие не выполняется никогда, т.к. фильтр с прямоугольной АЧХ физически нереализуем. Для того чтобы обойти данную проблему, необходимо использовать эквивалентную шумовую полосу.
Эквивалентная шумовая полоса – это полоса идеализированного прямоугольного фильтра, в который попадает такая же мощность шума, как и в реальный фильтр с непрямоугольной характеристикой.
Для того чтобы получить значение W для реального фильтра необходимо вычислить площадь под кривой АЧХ, а затем взять (мысленно) фильтр с прямоугольной АЧХ, коэффициент передачи в полосе пропускная которого равен 1, а площадь под кривой, такая же, как и в реальном фильтре. В этом случая в фильтр с прямоугольной АЧХ будет попадать такая же мощность шума. Ширина такого эквивалентного фильтра с прямоугольной АЧХ и есть эквивалентная шумовая полоса W.

Мощность шума, попавшего в реальный фильтр, равна мощности шума эквивалентного прямоугольного фильтра. N = Nэкв.
Переходи в раздел Радиосвязь и читай полезные статьи.