

- По виду управляющего сигнала, вырабатываемого автоматическим регулятором АСР бывают
Выберите один ответ:
1.релейные
2.непрерывные
3.дискретные
2. Частотные характеристики можно получить из:
Выберите один ответ:
1.функции Хевисайда
2.дельта-функции
3.передаточной функции
3. Если объект подчиняется принципу суперпозиции, то он считается:
Выберите один ответ:
1.стационарным
2.линейным
3.нелинейным
4. Замкнутая АСР с обратной связью реализует принцип регулирования:
Выберите один ответ:
1.по возмущению
2.по отклонению
3.по заданию
5. Целью регулирования является
Выберите один ответ:
1.поддержание регулируемого параметра на заданном значении
2.определение ошибки регулирования
3.выработка управляющих воздействий
6. Передаточной функцией системы называется
Выберите один ответ:
1.отношение выходного сигнала ко входному сигналу
2. отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу входному сигналу
3.отношение преобразованного по Лапласу входного сигнала к преобразованному по Лапласу выходному сигналу
7. Зависимость выходного параметра объекта от времени при подаче на вход дельта-функции называется:
Выберите один ответ:
1.статической характеристикой
2.импульсной характеристикой
3.частотной характеристикой
8.Зависимость выходного параметра объекта от входного называется:
Выберите один ответ:
1.статической характеристикой
2.импульсной характеристикой
3.динамической характеристикой
4.частотной характеристикой
9.Целью функционирования следящей АСР является
Выберите один ответ:
1.поддержание регулируемого параметра на заданном постоянном значении с помощью управляющих воздействий на объект
2.изменение регулируемой величины в соответствии с заранее неизвестной величиной на входе АСР
3.изменение регулируемой величины в соответствии с заранее заданной функцией
10. W(iw) обозначают:
Выберите один ответ:
1.передаточную функцию
2.переходную функцию
3.Амплитудно-фазовую характеристику
- Что является целью управления в системе автоматического регулирования?
1) изменение регулируемой переменной по заранее известному закону;
2) поддержание регулируемой переменной на заданном уровне;
3) изменение регулируемой переменной по заранее неизвестному закону;
4) обеспечение стремления регулируемой переменной к нулю при  .
.
- Что является целью управления в системе программного управления?
1) изменение регулируемой переменной по заранее известному закону;
2) поддержание регулируемой переменной на заданном уровне;
3) изменение регулируемой переменной по заранее неизвестному закону;
4) обеспечение стремления регулируемой переменной к нулю при .
- Что является целью управления в следящей системе?
1) изменение регулируемой переменной по заранее известному закону;
2) поддержание регулируемой переменной на заданном уровне;
3) изменение регулируемой переменной по заранее неизвестному закону;
4) обеспечение стремления регулируемой переменной к нулю при .
- Что такое передаточная функция системы (здесь у – выход, u – вход, L – преобразование Лапласа)?
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Характеристическое уравнение системы это:
1) числитель передаточной функции, приравненный к нулю;
2) знаменатель передаточной функции, приравненный к нулю; +
3) уравнение, которое описывает частное вынужденное движение системы;
4) уравнение, которое описывает систему в общем виде.
- Чему равна передаточная функция двух звеньев, соединенных последовательно?
1)  ;
;
2)  ;
;
3)  ;
;
3)  .
.
- Чему равна передаточная функция двух звеньев, соединенных параллельно?
1) ;
2) ;
3) ;
3) .
- Чему равна передаточная функция двух звеньев, соединенных встречно-параллельно?
1)
2) ;
3) ;
3) .
- Что такое переходная функция?
1) реакция системы на гармоническое входное воздействие;
2) реакция системы на единичное ступенчатое воздействие;
3) реакция системы на импульсное воздействие;
4) реакция системы на линейно растущий сигнал.
- Что такое весовая функция?
1) реакция системы на гармоническое входное воздействие;
2) реакция системы на единичное ступенчатое воздействие;
3) реакция системы на импульсное воздействие;
4) реакция системы на линейно растущий сигнал.
- Какова взаимосвязь импульсной функции
 и ступенчатой 1(t)?
и ступенчатой 1(t)?
 и ступенчатой 1(t)?
и ступенчатой 1(t)?1)  ;
;
2)  :
:
3)  ;
;
4)  .
.
- Что такое ЛЧХ?
1) линейная частотная характеристика;
2) логарифмическая частотная характеристика;
3) логарифмическая частная характеристика;
4) линейная частная характеристика.
13. Что такое АФЧХ?
1) амплитудно-фазовая частотная характеристика;
2) аналогово-фазовая чувствительная характеристика;
3) амплитудно-фиктивная частотная характеристика;
4) амплитудно-фазовая частная характеристика.
- Что такое частотная передаточная функция (здесь у – выход, u – вход, обозначение Ф{} – соответствует преобразованию Фурье)?
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Если частотная передаточная функция задана в виде W(j )=U( )+jV( ), то амплитудная частотная характеристика:
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Если частотная передаточная функция задана в виде W(j )=U( )+jV( ), то фазовая частотная характеристика:
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Укажите верное тождество:
1) A(  )=20lgL( );
)=20lgL( );
2) L( )=20lgA( );
3) L( )=20lnA( );
4) L( )=lnA( ).
- Укажите звено второго порядка:
1) W(p)=k;
2) W(p)=(Tp+1);
3)  ;
;
4)  .
.
- Укажите передаточную функцию апериодического звена 1-го порядка:
1) W(p)=kр;
2)  ;
;
3)  ;
;
4)  .
.
- Укажите передаточную функцию интегрирующего звена:
1) W(p)=kр;
2) ;
3) ;
4) .
- Укажите передаточную функцию дифференцирующего звена:
1) W(p)=kр;
2) ;
3) ;
4) .
- Чему равна фаза для интегрирующего звена:
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Чему равна фаза для дифференцирующего звена:
1) ;
2) ;
3) ;
4) .
- Чему равна фаза для пропорционального звена:
1) ;
2) ;
3) ;
4) .
- Каков коэффициент демпфирования для колебательного звена?
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Каков коэффициент демпфирования для консервативного звена?
1) ;
2) ;
3) ;
4) .
- Каков коэффициент демпфирования для апериодического звена II-го порядка?
1) ;
2) ;
3) ;
4) .
- Где расположены корни характеристического полинома для устойчивой непрерывной САУ?
1) в левой полуплоскости комплексной плоскости;

2) на мнимой оси;
3) в правой полуплоскости комплексной плоскости;
4) в 1-ой и 2-ой четвертях.
- Для устойчивой системы необходимо, чтобы:
1) свободный коэффициент характеристического полинома был равен нулю;
2) все коэффициенты характеристического полинома строго отрицательны;
3) количество положительных и отрицательных коэффициентов этого полинома одинаково;
4) все коэффициенты характеристического полинома строго положительны.
- В соответствии с критерием Гурвица система асимптотически устойчива, если:
1) количество положительных и отрицательных миноров матрицы Гурвица одинаково;
2) определитель матрицы Гурвица отрицательный;
3) при а0>0 все главные миноры матрицы Гурвица положительны;
4) при а0>0 все главные миноры матрицы Гурвица отрицательны.
- В соответствии с критерием Михайлова в устойчивой системе годограф Михайлова при =0 начинается:
1) на вещественной положительной полуоси;
2) в начале координат;
3) на вещественной отрицательной полуоси;
4) на мнимой положительной полуоси.
- В соответствии с критерием Михайлова в устойчивой системе годограф Михайлова проходит:
1) n квадрантов, где n – порядок системы;
2) (n-1) квадрантов, где n – порядок системы;
3) (n+1) квадрантов, где n – порядок системы;
4) m квадрантов, где m – число входных сигналов.
- Для определения устойчивости с помощью критерия Найквиста критической точкой является:
1) начало координат (0,0);
2) точка с координатами (1,j0);
3) точка с координатами (-1,j0);
4) точка с координатами (0,-j).
- Для устойчивости замкнутой системы по критерию Найквиста необходимо и достаточно, чтобы АФЧХ устойчивой разомкнутой системы:
1) не охватывала точку с координатами (-1,j0);
2) проходила через точку (1,j0);
3) охватывала точку с координатами (-1,j0);
4) не охватывала начало координат.
- Частота среза — это частота, для которой верно тождество:
 — это частота, для которой верно тождество:
— это частота, для которой верно тождество:1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
- Запас устойчивости по фазе определяется:
1) на сопрягающей частоте;
2) на частоте среза;
3) на частоте =0;
4) на частоте резонанса.
- Если САУ имеет монотонные частотные характеристики, то для ее устойчивости требуется, чтобы ЛФХ
1) равнялась нулю на частоте среза;
2) была меньше нуля на частоте среза;
3) лежала выше уровня «  » на частоте среза;
» на частоте среза;
4) лежала выше уровня «-π» на частоте среза.
- Временные показатели качества определяются:
1) по переходной функции;
2) по весовой функции;
3) по амплитудной частотной характеристики (АЧХ);
4) по ЛАХ.
- Что такое перерегулирование?
1)  ;
;
2)  ;
;
3)  ;
;
4)  .
.
Разработанный Microsoft искусственный интеллект научился расизму за сутки — Офтоп на TJ

23 марта компания Microsoft представила искусственный интеллект по имени Tay, который начал общаться с пользователями сети через Твиттер. Спустя считанные часы компании пришлось подвергнуть своё детище цензуре и на время остановить работу проекта. Об этом сообщает The Next Web.
Обновление на 26 марта: добавлено извинение вице-президента Microsoft Research.
Первоначально целью Microsoft было создать чат-бота, который общается на языке молодых людей от 18 до 24 лет.
Tay использовала словосочетания вроде «zero chill» (обозначает полное безразличие), а также различные сокращения вроде «c u soon» вместо «see you soon» («скоро увидимся»).
hellooooooo w
Применение искусственного интеллекта в тестировании ПО

Оригинальная публикация
Автор: Артур Пачин
Да, у нас есть опыт применения ИИ
Инженеры Перфоманс Лаб постоянно исследуют возможности применения наиболее эффективных передовых технологий, позволяющих получать более качественные результаты в работе, в том числе искусственный интеллект. У нас имеется опыт использования технологий машинного обучения для системы HelpDesk.
Технология применяется для автоматического заполнения различных полей входящих инцидентов. Для успешного предсказания значений в данных полях, искусственный интеллект предварительно обучался на заданной выборке заполненных инцидентов и с помощью алгоритмов машинного обучения строил модель.
На основе построенной модели в дальнейшем делались предсказания значений полей.
Что грядет
Технологии постепенно поглощают всё больше сфер деятельности, на очереди тестирование программного обеспечения. Мы все настолько избалованы повсеместной автоматизацией, что при появлении подходящих инструментов с радостью бы передали большую часть тест-дизайна и валидации тестов на откуп искусственного интеллекта (ИИ).
Обратите внимание
Вместо того чтобы вручную настраивать автоматизированное тестирование, машины будут сами разрабатывать и выполнять тесты, постоянно совершенствуясь во время взаимодействия с людьми.
Эта механизация тестового покрытия означает, что каждая команда разработки скоро будет иметь доступ к виртуальной команде тестировщиков с более развитым интеллектом, скоростью работы и уровнем охвата, чем даже самые высокооплачиваемые команды разработки могут получить сегодня.
Ручное тестирование
Ручное функциональное тестирование является дорогим, как по времени, так и по деньгам. Самые продвинутые команды разработки приложений и вендоры кодят тысячи строк тестов для своих приложений: строка за строкой набирая одно и тоже «нажмите сюда» и «проверьте то».
Такой подход имеет много недостатков, в том числе в плане финансирования команды тестирования. Создание таких тестов отвлекает внимание разработчиков от основной цели, которую они создают – самого продукта.
Кроме того, для запуска эти скрипты либо требуют управления многими машинами или же привлечения серьезных человеческих ресурсов для выполнения вручную. Все это съедает драгоценное время. Полное прохождение тестов может занимать несколько дней, а порой и несколько недель.
Это не вяжется с политикой сегодняшних команд разработки, которые стремятся создавать и развертывать свои приложения ежедневно или даже непрерывно. Ручное тестирование не может поддерживать такой темп, как бы не старалось.
На что тратятся силы в автоматизации
Если рассматривать классический подход к автоматизации тестирования, то поддержка тестов является фактором, дополнительно повышающим её стоимость: чем больше тестов – тем трудозатратнее и дороже становится их поддержка. Далее, когда меняется приложение, тестовый код чаще всего также кто-то должен обновить.
И зачастую выходит так, что большинство усилий автоматизации быстро превращается в чистое техническое обслуживание, с небольшим количеством изменений по дополнительному покрытию. Боты ИИ развиваются и после изменений в коде.
Важно
Поскольку боты не жестко закодированы, они адаптируются и сами учатся находить новые функции приложения. Когда ИИ находит изменения, он автоматически оценивает их, чтобы определить, что это: новый функционал или дефекты нового релиза.
Таким образом, жестко-закодированные тестовые скрипты являются хрупкими и требуют ручной доработки после каждого изменения в коде приложения, а ИИ ботов самостоятельно развивается после изменения кода.
Что происходит при усложнении приложения
Ручное тестирование не масштабируется, потому что тесты создаются по одному за раз. Добавление тестов является линейной активностью. Добавление функций продукта может увеличить сложность в геометрической прогрессии, так как новые функции и состояния взаимодействуют с более старыми функциями.
В начале проекта обычно тестирование может идти параллельно наращиванию функциональности, но чем сложнее становится приложение, тем сложнее становится обеспечить полное его покрытие тестами. Что наиболее расстраивает в текущем состоянии ручного тестирования – это то, что оно проверяет только конкретные кейсы, которые вы выбрали — и ничего больше.
Если добавляется новая функция, то ранее созданный вручную авто-тест все равно завершится успешно, даже если новая функция не работает.
Только исследовательское тестирование (человеком) сможет обнаружить эти изменения, но этого чаще всего не происходит, так как данное время расходуется на повторное выполнение основных тестов, поэтому нередко возникают ситуации, когда ручное тестирование проверяет работоспособность приложения в целом, упуская детали.
Чем ИИ лучше
Подход ИИ для проверки качества выигрывает в тех случаях, которые вызывают так много проблем при ручном тестировании.
Если бы мы имели простой ИИ, который бы знал, как обойти функционал приложения подобно конечному пользователю или тестировщику, записывал бы метрики производительности и отслеживал, где находится каждая кнопка или текстовое поле, то он мог бы генерировать и выполнять десятки тысяч тест-кейсов в течение нескольких минут. А что, если дать машине тысячи примеров ошибок, а также примеры правильного функционирования. Боты могли бы предложить, где команда должна сосредоточить свои усилия. И если эти боты протестируют тысячи других приложений, параллельно обучаясь, они получат огромный опыт, который может помочь команде тестирования для принятия решений по развертыванию. Таким образом, понятие Боты в контексте тестирования начинает звучать вполне правдоподобно и разумно.
ИИ заметит каждую мелочь, которая добавляется или удаляется из приложения.
Там, где ручная автоматизация пропускает изменения в последнем билде, боты ИИ автоматически нажмут каждую новую кнопку, добавленную в приложение, и обратят внимание на каждую картинку, пропавшую из приложения.
Боты будут оценивать все изменения и ранжировать их в зависимости от того, насколько они важны на основании коллективного разума текущей команды тестирования, а также и всех других команд, которые пометили аналогичные изменения как «фичу» или «баг».
А теперь пришло время рассмотреть возражения от скептиков:
Возражение 1: «Мое приложение является особенным, ИИ тут не поможет»
В действительности, ваше приложение выглядит так же, как и многие другие. Если разделить его на части, подобно тому, как шеф-повар разделывает рыбу, вы заметите, что приложение имеет кнопки, текстовые поля, изображения и т.д., то есть те же ингредиенты, как и любое другое. Если ИИ может анализировать какое-то другое приложение, то весьма вероятно, он достаточно хорошо сработает и на вашем.
Возражение 2: «Эй, я всегда буду умнее бота!»
Совет
Врачи, кредитные и финансовые консультанты однажды тоже думали, что не могут быть заменены ИИ и автоматизированы. А правда в том, что вы знаете только то, что вы знаете – ваше приложение и тест-кейсы, книгу или две, и может быть то, что вы выучили в ходе беседы на конференции о тестировании.
ИИ как Терминатор: не знает усталости, ничего не забывает, без страха и боли неумолимо идёт к своей цели.
Вы действительно умнее и в состоянии сделать больше, чем 100, 1000 или 10000 ботов, анализирующих ваше приложение? Даже если вы умнее –не предпочли бы вы иметь ботов, делающих всю скучную работу за вас, чтобы вы вместо этого смогли сосредоточиться на творческих или более сложных вопросах?
Возражение 3: «Конечно, но как ИИ знает, какие тестовые данные подойдут для приложения?»
Если хорошенько подумать: большинство приложений принимают одни и те же данные. Имена, адреса электронной почты, телефоны, поисковые запросы товаров, фотографии профиля из камеры и т.д.
Практически весь поток входных данных в ваше приложение составляют типичные данные, которые можно классифицировать и структурировать. Небольшого набора данных будет достаточно для построения впечатляющего ИИ тестирования.
По крайней мере, этого будет достаточно, чтобы стать вашим помощником.
Возражение 4: «Хорошо, но как эти боты узнают, правильно ли приложение работает?»
Хороший вопрос. Действительно, как вы узнаете, что приложение функционирует нормально? Вы никогда этого не делаете. У вас есть какие-то тесты, может быть, 100 ручных или автоматизированных тестовых скриптов, и они проходят успешно, но они тестируют только небольшой кусочек возможного пространства состояний вашего приложения.
Вы также знаете, что самую большую ценность имеет информация в виде обратной связи, ошибок от реальных пользователей и их планомерное исправление. То, что вы действительно хотите знать в тестировании так это: «Работает ли оно так же, как вчера?».
Обратите внимание
Если нет, то в чем различия – это хорошо или плохо? Это действительно то, что является результатом большинства испытаний. ИИ боты отлично подходят для поиска по тысячам точек в вашем приложении, проверяя множество вещей, чтобы убедиться, что все работает так, как это было вчера.
С помощью быстрого сканирования, бот может сказать вам, что 99% вашего приложения работает так же, как это было на последнем релизе, а вы можете сосредоточиться на 1% того, что изменилось.
Появятся ли ИИ боты в ближайшее время? Сейчас боты ИИ тестирования уже начали свое обучение, тестируя сотни самых больших приложений на рынке.
Данный текст является адаптированным переводом статьи: https://www.linkedin.com/pulse/ai-software-testing-jason-arbon
Автор оригинала Джейсон Арбон, генеральный директор Appdiff
Обсудить в форуме.
Искусственный интеллект в тестировании ПО: идут AI боты! | Блог Bytex

Термин «AI» использовался в видеоиграх с момента их создания, но под ним не подразумевался настоящий искусственный интеллект. Это общий термин для описания заранее запрограммированного противника или персонажа, который просто следует узкому набору инструкций.
Но все меняется, и ранее мы уже писали о том, что Electronic Arts начала тестировать самообучающихся ботов в Battlefield 1, делая уверенный шаг вперед в игровом искусстве. Разработчики заявили, что, используя технологии самообучения при тестировании игр, можно обойтись без участия живых людей. Но так ли это на самом деле? Давайте порассуждаем!
Тестирование и AI
Компьютеры действительно хорошо играют и даже разрабатывают видеоигры, от простых платформеров до более сложных, таких как Mortal Combat. А сейчас весь мир следит за тем, как машины могут позаботиться об одной из самых мучительных проблем в современной разработке игр — тестировании.
Тестирование видеоигры немного отличается от обычного тестирования программного обеспечения, так как многие из стандартных методов в данном случае неприменимы. Кроме того, этот процесс автоматизировать достаточно сложно.
Модульное тестирование существенно помогает улучшить качество программного обеспечения. Но подобные подходы, применяемые на практике тестировщиками, встречаются редко. Причина состоит в самом функционале игры, которая зависит от процесса рендеринга в игровой механике.
Что грядет?
Ключом к успешному тестированию видеоигр является игра в качестве реального пользователя. Этого можно добиться, подражая реальным пользователям, а именно — создав самообучающегося бота AI.
Компания Electronic Arts продемонстрировала самообучающийся искусственный интеллект в экшене Battlefield 1, намекая на то, что рано или поздно индустрия придет к тому, что ИИ позволит модифицировать процесс разработки игр, упразднив многие ее этапы.
С помощью ботов разработчики смогут, без привлечения сторонних компаний, проектировать и тестировать свои продукты, создавать массовость на серверах и симулировать нагрузки на них, искать геймплейные ошибки, недочеты, механические проблемы с отсутствием объектов или присутствием их не там, где надо. Это можно будет сделать просто снимая информацию с ботов, которые день и ночь будут трудиться на благо геймеров.
Вскоре исчезнут проблемы с недостатком онлайна на серверах! Игроки больше не будут стоять в долгих очередях в лобби и ждать недостающих игроков. Спустя еще какое-то время ботов научат определять cкилл игрока на сервере и подстраиваться под него…
Определенно, нас ждет интересное будущее в развитии игровой индустрии!
Заберут ли AI-боты всю работу по тестированию QA?
Реальная ценность в тестировании — это креатив, необходимый для выявления ошибок, которые люди (программисты) не думали или не могли предсказать на момент разработки продукта. И одна из самых больших проблем для разработчиков AI сегодня — наделить машины здравым смыслом.
8 неочевидных способов определить искусственный интеллект

Этот тест назван в честь Ады Лавлейс, математика из XIX века, которую считают первым в истории программистом. Он призван определить наличие интеллекта у машины через способность её к творчеству.
Первоначально тест предложили в 2001 году: тогда машина должна была создать произведение искусства, которое разработчик машины принял бы за созданное человеком.
Так как чётких критериев успеха нет, тест получается слишком неточным.
В прошлом году профессор Марк Рейдел из Технологического института Джорджии обновил тест, чтобы сделать его менее субъективным. Теперь машина должна создать произведение в определённом жанре и в определённых творческих рамках, заданных человеком-судьёй.
Важно
Проще говоря, это должно быть произведение искусства в конкретном стиле. Скажем, судья может попросить машину нарисовать маньеристскую картину в духе Пармиджанино или написать джазовое произведение в духе Майлза Дэвиса.
В отличие от оригинального теста, машины работают в заданных рамках, и поэтому судьи могут оценивать результат более объективно.
Этот тест придумал Чарли Ортиц, менеджер по искусственному интеллекту в компании Nuance Communications. По словам Ортица, недостаток теста Тьюринга в том, что он проверяет в первую очередь языковые способности, опуская другие важные составляющие разума — восприятие и физические действия. Проще говоря, у компьютеров, проходящих тест Тьюринга, нет глаз или рук.
Испытание IKEA (также известное как строительное испытание), придуманное Ортицом, призвано обойти эти ограничения.
Его могут пройти только роботы, способные построить физические структуры из, например, деталей мебели IKEA или даже кубиков LEGO.
Робот, проходящий испытание IKEA, должен давать вербальные инструкции и описания структур, самостоятельно манипулировать деталями и физическими компонентами, следить за постройкой, отвечать на вопросы и описывать ход работы.
Как и Ортиц, создатели визуального теста Тьюринга пытаются уменьшить роль языка в первоначальном тесте. Сотрудники Эксетерского университета в Англии Майкл Барклай и Энтони Галтон придумали тест, который проверяет визуальные способности машины, то есть может ли она «видеть», как человек. Тест можно посмотреть здесь.
Машине показывают картинку и спрашивают, например, где на ней находится чашка, — и дают несколько вариантов ответа. Все варианты ответов правильные (на столе, на подстилке, перед стулом, слева от лампы), но некоторые из них могут быть более человеческими, чем другие (скажем, из всего перечисленного человек скорее ответит «на столе»).
Совет
Кажется, что это простое задание, но на самом деле способность описать, где находится объект по отношению к другим объектам — важнейший элемент человеческого разума. Здесь играют роль множество нюансов и субъективных суждений, от размера объектов до их роли в конкретной ситуации — в общем, контекст.
Люди проделывают это интуитивно, а машины сталкиваются с проблемами.
Чат-боты, проходящие тест Тьюринга, умело обманывают судей и заставляют поверить, что они — люди. По словам Гектора Левеска, профессора информатики в Университете Торонто, такой тест лишь показывает, как легко обмануть человека, особенно в короткой текстовой переписке. Но из теста Тьюринга невозможно понять, есть ли у машины интеллект или хотя бы понимание языка.
В 2011 году Левеск опубликовал статью, в которой предложил новый тест, так называемую «схему Винограда», названную в честь учёного Терри Винограда. Проходя этот тест, машина отвечает на вопросы с двумя вариантами ответа.
Звучит просто — и для людей эти вопросы действительно простые, — но они сформулированы так, что без естественного понимания языка машина испытывает трудности. Вот один из вопросов: «Трофей не влезал в коричневый чемодан, потому что он был слишком маленьким (большим). Что было слишком маленьким (большим)?».
Если в вопросе используется слово «маленьким», то ответ — трофей, если «большим» — то чемодан. Эрнест Дэвис, коллега Левеска, работавший с ним над исследованием, опубликовал целую библиотеку вопросов, которые могут быть использованы в таком тесте.
Чтобы ответить правильно, нужно обладать навыками, которые до сих пор недоступны компьютерам: например, уметь представлять пространство, отношения между людьми, размер объектов, даже нюансы политики — всё зависит от конкретных вопросов.
Некоторые исследователи предлагают перевернуть тест Тьюринга с ног на голову — и сделать так, чтобы не человек проверял машину, а чтобы машина могла определить человека.
Самая популярная форма такого теста — это CAPTCHA, запутанные надписи, которые вы видите на многих сайтах и которые нужно вбивать на клавиатуре так, как показано на экране.
CAPTCHA мало кто воспринимает всерьёз, но в то же время между создателями CAPTCHA и роботами, способными их обойти, идёт что-то вроде гонки вооружений. Если будут побеждать первые, мы сможем прийти к более сложным системам, которые научатся превосходно отличать человека от машины.
Обратите внимание
Уже сейчас предлагают более сложные альтернативы: скажем, соединение CAPTCHA с тачскринами. Практического смысла для определения ИИ в обратном тесте Тьюринга мало, но он может размыть наши представления о человечности, интеллекте и заставить нас посмотреть на это по-новому.
Учёный-когнитивист Гэри Маркус — активный критик теста Тьюринга в его нынешнем виде. В этом году, например, он организовал конференцию, посвящённую вопросам искусственного интеллекта, где призывал оставить тест Тьюринга и придумать что-нибудь новое.
Маркус предложил свою альтернативу, которую, например, описал в статье для журнала The New Yorker.
Он предлагает построить компьютерную программу, которая смогла бы смотреть телевизионные шоу и видео на YouTube и отвечать на вопросы по их содержанию — ну, скажем, почему Джоффри Баратеон приказал казнить Эддарда Старка. Но это не так трудно.
Тест Маркуса заключается в другом: включите такой программе эпизод «Симпсонов» и пусть она объяснит, в каких местах следует смеяться. Если компьютер может определить и понять юмор, сарказм и иронию — и даже объяснить их — значит, он максимально приблизился к интеллекту, а может и обладает им.
Для того чтобы доказать, что машина обладает разумом, нужно больше, чем поведенческие и языковые тесты. Нужно доказать, что у неё есть необходимые инструменты для интеллекта, что у машины есть какой-то эквивалент сложного и динамического человеческого мозга, даже если этот мозг — просто код.
В нейробиологии есть термин нейронный коррелят сознания — это сложный набор механизмов и событий в мозге, необходимых для сознания. Если мы обнаружим коррелят в машине, мы убедимся, что перед нами не просто симуляция сознания, а настоящее сознание. Но это очень трудно: о человеческом мозге мы понимаем очень мало.
Так что цифровое вскрытие машины скорее работает не как тест, а как шаг к созданию искусственного мозга — всё-таки, чтобы вскрыть и увидеть такой мозг, нужно его сначала создать.
На упомянутой выше конференции, организованной Гэри Маркусом, предложили ещё одно неожиданное решение проблемы теста Тьюринга — так называемая олимпиада Тьюринга. Любое единичное испытание проверяет наличие интеллекта не полностью, потому что в человеческом интеллекте есть много разных элементов.
Поэтому учёные предлагают организовать целую серию испытаний для машины, каждое из которых будет проверять разные аспекты интеллекта. В конце концов, по отдельности машины становятся всё лучше в разных сферах: от зрения и визуального распознавания до распознавания речи и понимания языка.
Организаторы конференции планируют провести первую такую олимпиаду уже в начале следующего года.
Изображения via Duck, Shutterstock
Искусственный интеллект Microsoft превзошел человека в видеоигре

Видеоигры за последние десятилетия стали одним из любимейших способов проводить свободное время.
Может ли искусственный интеллект играть лучше человека? Может, даже в четыре раза лучше, как показывают результаты тестирования компанией Microsoft искусственного интеллекта.
Но, разумеется, в качестве примера была взята одна определенная игра, сохраняющая немалую популярность даже спустя более трех десятилетий после своего дебюта.
Важно
Исследователи Microsoft тестируют искусственный интеллект и машинное обучение системы искусственного интеллекта. В ходе тестирования искусственный интеллект показал свою способность достигнуть теоретического максимума очков в игре Ms.
Pac-Man, адаптированной для исторической игровой приставки Atari 2600. Ни одному человеку подобного результата достигнуть не удалось.
Рекорд был поставлен искусственным интеллектом спустя более чем 34 года после выхода игры, которая увидела свет в 1982 году.
Рассматриваемый искусственный интеллект был создан стартапом Maluuba, приобретенным софтверным гигантом Microsoft ранее в 2017 году. На нем тестируется тип машинного обучения, называемого «обучением с подкреплением».
Если попробовать наиболее просто описать суть метода, то речь идет о том, что создано примерно 150 искусственных интеллектов, которые входят в игру, сосредоточившись на индивидуальной цели, например, нахождении ближайшего необходимого игрового предмета или избегании привидений. Найденные ими решения объединяются и затем управляются искусственным интеллектом более высокого уровня, который воспринимает эти решения в качестве подсказок и делает из них наилучший выбор, возможный в конкретной ситуации.
Искусственному интеллекту предстоит взвешенно походить к принятию решений, оценивая их эффективность.
Например, если в данном случае касание привидения ведет к провалу, даже если 100 искусственных интеллектов говорят о том, что необходимо двигаться вправо и «проглотить» следующий бонус, несмотря на приближающееся привидение, а всего три советуют этого не делать, то их совет все равно приоритетен.
В результате такой искусственный интеллект оказался способным набрать максимально 999 990 очков. Исследователи говорят, что это максимум, который вообще когда-либо достигался в версии игры Ms. Pac-Man для Atari 2600. Более того, он в четыре раза превосходит рекорд, поставленный человеком, который составлял 211 480 очков.
Совет
Игра Ms. Pac-Man могла быть выбрана по той причине, что поведение привидения в ней отличается большей сложностью и меньшей предсказуемостью, чем в обычной Pac-Man. Впрочем, причина, по которой предпочтение было отдано именно этой консольной версии, не уточняется.
К каким практическим результатам может вести данное исследование? Исследователи полагают, что разработанная ими методология сможет помочь специалистам по продажам. Она также может найти себе применение в обработке естественного языка.
Удивляет ли вас способность искусственного интеллекта превосходить человека в видеоиграх?
По материалам polygon.com
1 Общая задача оптимального управления.
А. Оптимизация управления динамическими системами и процессами.+
Б. Управление информационными системами.
В. Оптимизация разработки компьютерных программ.
Г. Анализ устойчивости систем автоматического управления.
2 Формулировка проблемы оптимального управления.
А. Разработка математических моделей динамических систем.
Б. Анализ устойчивости систем автоматического управления.
В. Оптимизация разработки компьютерных программ.
Г. Содержит критерий оптимальности (функционал), математическую модель процесса управления и ограничения на эволюцию траектории системы и ресурсы управления. +
3 Основные математические методы теории оптимальных процессов.
А. Линейная алгебра.
Б. Операционное исчисление
В. Принцип максимума Понтрягина, динамическое программирование Беллмана, математическое программирования.+
Г. Преобразование Фурье.
4 Необходимые условия оптимальности управления.
А. Условия существования оптимального решения.
Б. Условия, которых достаточно для определения оптимального решения.
В. Условия определения оптимального решения.
Г. Условия, при которых определяется определенная множество решений, яки могут содержит оптимальное.+
5 Достаточно условия оптимальности управления.
А. Условия существования решения проблемы оптимизации.
Б. Условия существования локального экстремума функционала.
В. Условия, яки определяют глобальный экстремум качества функционирования системы (процесса) управления.+
Г. Условия, которые обеспечивают нахождения допустимого управления.
6 Существование оптимального управления.
А. Оптимальное решение всегда существует, но не является единственным.
Б. Оптимальное решение существует не всегда.+
В. Оптимальное решение всегда существует и является единственным.
Г. Оптимальное решение всегда существует.
7 Задача использования методов оптимального управления в теории автоматического управления динамическими системами.
А. Анализ управляемости систем автоматического управления.
Б. Анализ устойчивости систем автоматического управления.
В. Анализ точности систем автоматического управления.
Г. Построение оптимального закона управления системами автоматического управления. +
8 Разомкнутые системы управления
А. Системы управления с обратной связью.
Б. Системы программного управления.+
В. Любой яки оптимальные системы.
Г. Любой яки неоптимальные системы.
9 Сомкнутые системы управления
А. Любой яки системы управления
Б. Системы с программным управлением
В. Нелинейные системы управления
Г. Системы с обратной связью +
10 Стохастические системы управления.
А. Системы управления, параметры или сигналы в которых есть случайными.+
Б. Линейные системы.
В. Оптимальные системы.
Г. Нелинейные системы.
11 Математическая модель линейной динамической системы управления.
А. dx / dt = Ax + Bu.+
Б. dx / dt = f (x, u, t).
В. dx / dt = f (x, u, t).
Г. dx / dt = xTx + uTu.
12 Математическая модель нелинейной динамической системы управления.
А. dx / dt = f (x, u, t) .+
Б. dx / dt = Ax (t) + Bu (t).
В. dx / dt = Ax (t) + Bu (t) + W (t).
Г. dx / dt = A (t) x (t) + B (t) u (t).
13 Стационарная система.
А. Система, параметры которой зависят от времени
Б. Система, параметры которой не зависят от времени+
В. Любая линейная система.
Г. Любая нелинейная система.
14 Нестационарная система.
А. Система, параметры которой зависят от времени+
Б. Система, параметры которой не зависят от времени
В. Любая линейная система.
Г. Любая нелинейная система.
15 Цифровые системы управления.
А. Системы программного управления.
Б. Сомкнутые системы управления.
В. Аналоговые системы управления.
Г. Системы управления с цифровым регулятором+
16.Математична модель объекта управления.
А. Математическое описание реального объекта, адекватной задачи, которая анализируется.+
Б. Вес объекта.
В. Габариты объекта.
Г. Драгоценность объекта
17.Зминни состояния управляемого процесса, системы.
А. Совокупность координат, яки однозначно определяют текущее состояние системы. +
Б. Координаты вектора скорости объекта.
В. Координаты вектора положения объекта.
Г. Координаты вектора ускорения объекта.
18. Метод пространства состояния.
А. Метод, в котором математическая модель дана в виде системы дифференциальных уравнений первого порядка (в форме Коши) .+
Б. Метод, в котором математическая модель дана в виде дифференциального уравнения n-го порядка.
В. Метод исследования устойчивости динамических систем.
Г. Метод анализа переходного процесса системы управления.
19. Траектория движения системы.
А. Ускорение объекта.
Б. Эволюция координат, яки характеризуют вектор состояния системи.+
В. Скорость объекта.
Г. Вектор состояния системы в текущий момент.
20.Допустима траектория движения системы
А. Траектория, параметры движения которой находятся в допустимой области в любой момент.+
Б. Любая траектория.
В. Только оптимальная траектория.
Г. Любая оптимальная траектория.
21.Оптимальна траектория системы управления.
А. Допустимая траектория, которая соответствует оптимальному закона управления +
Б. Любая траектория.
В. Любая допустимая траектория.
Г. Траектория при терминальном управлении
22. Закон управления.
А. Траектория движения системы.
Б. Функция управления, аргументом которой является время или вектор состояния системы.+
В. Любая функция управления системой
Г. Допустимая траектория движения системы.
23. Допустимое управления.
А. Закон управления, на интервале управления соответствует заданным ограничением.+
Б. Любое управление.
В. Только оптимальное управление.
Г. Только программное управление.
24. Оптимальный закон управления.
А. Любое управления.
Б. Только программное управление.
В. Допустимый закон управления, которому соответствует оптимальный показатель качества.+
Г. Любое допустимое управление.
25.Оптимальна программа управления.
А. Оптимальной закон управления разомкнутой системе, который соответствует фиксированному начальном вектора состояния системы и является функцией времени.
Б. Закон, который учитывает текущее состояние системы.
В. Оптимальный закон управления сомкнутой системой.+
Г. Любая допустимая программа управления.
Министерство образования и науки рф
УФИМСКИЙ
ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ
ФИЛИАЛ В Г. ИШИМБАЙ
Отчет по лабораторной
работе №3
по
предмету «Теория автоматического
управления»
на тему:
Исследование
динамической точности систем
автоматического
регулирования.
Выполнил: студент
гр. АТП-308
Шарипов Д.В.
Приняла:
Перевертайло Ю.В.
Ишимбай 2006
1. Цель работы
Целью данной работы является определение
динамической точности систем
автоматического регулирования путём
нахождения коэффициентов ошибок, а
также с помощью логарифмических
амплитудно-частотных характеристик;
приобретение навыков моделирования
систем автоматического регулирования
на ЭВМ с помощью пакета прикладных
программ.
2.
Основные
сведения
Под системой автоматического регулирования
понимают динамическую систему, в которой
управление осуществляется с помощью
сигнала разности между управляющим
воздействием и действительным изменением
регулируемой переменной.
Одной
из наиболее важных характеристик системы
автоматического регулирования является
её динамическая точность, или ошибка в
системе при подаче на неё управляющих
и возмущающих воздействий. Известно,
что последние делятся на два типа:
регулярные и случайные. Обычно регулярные
воздействия являются медленно меняющимися
функциями времени по сравнению с
длительностью переходного процесса
системы. При этом точность системы
регулирования определяется значением
ошибки в установившемся режиме.
![]()
Статические и астатические системы
автоматического регулирования
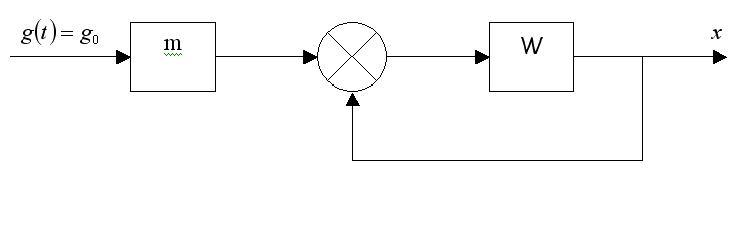
Большинство
структурных схем систем автоматического
регулирования с помощью структурных
преобразований можно привести к схемам,
показанным на рис. (3.1).

а)

б)
в)

г)
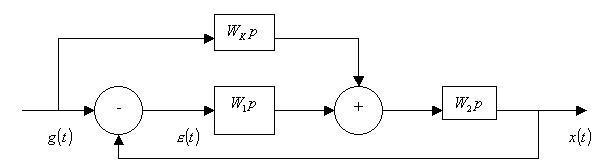
а, б – структурные
схемы САР замкнутого цикла по отклонению
и по возмущению;
в – структурная
схема САР комбинированного цикла с
компенсацией ошибки по управлению;
г – структурная
схема САР комбинированного цикла с
компенсацией ошибки по возмущению;
W1
– передаточная функция усилительного
устройства или группы усилительных
устройств и регуляторов;
W2
– передаточная функция исполнительного
устройства и объекта регулирования
Из
рисунка (3.1) динамическая ошибка системы
равна:
![]() (3.1)
(3.1)
Установившаяся
ошибка системы определяется из выражения:
![]() (3.2)
(3.2)
В
зависимости от значения
![]()
определяется тип системы автоматического
регулирования – статическая или
астатическая.
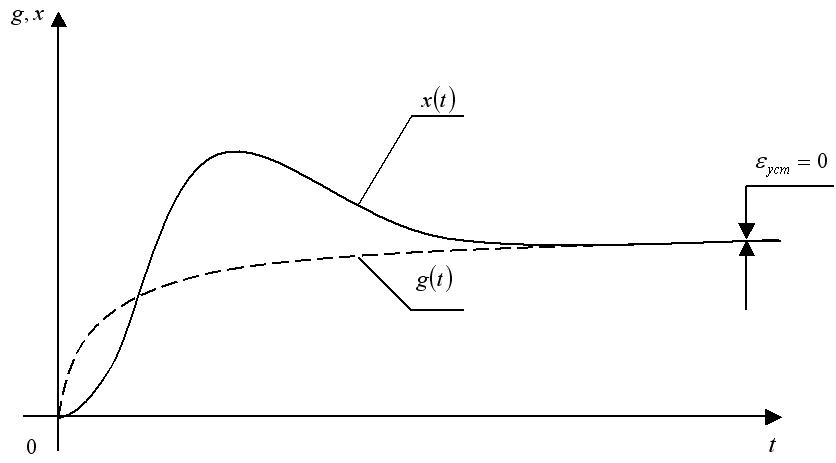
Система автоматического регулирования
называется статической по отношению к
управляющему воздействию, если при
воздействии, стремящемся с течением
времени к некоторому установившемуся
значению, ошибка также стремится к
постоянному значению, зависящему от
величины управляющего воздействия
(рис. 3.2, а).

Система автоматического регулирования
называется астатической по отношению
к управляющему воздействию, если при
воздействии, стремящемуся к установившемуся
значению, ошибка стремится к нулю
независимо от величины воздействия
(рис. 3.2, б).
К статическим системам автоматического
регулирования относятся все устойчивые
в разомкнутом состоянии системы. Если
же система в разомкнутом состоянии
имеет корни в центре координат, то такая
система будет астатической. Порядок
астатизма системы зависит от числа
интегрирующих звеньев, входящих в
систему и не охваченной жёсткой обратной
связью. Передаточная функция системы
в разомкнутом состоянии может быть
представлена в виде:
![]()
где
n
— порядок астатизма; при
![]()
система является статической. То же
можно сказать относительно систем
автоматического регулирования,
статических либо астатических по
возмущаемому воздействию.
Можно создать систему автоматического
регулирования, являющейся астатической
как по управляющему воздействию, так и
по возмущающему воздействию.
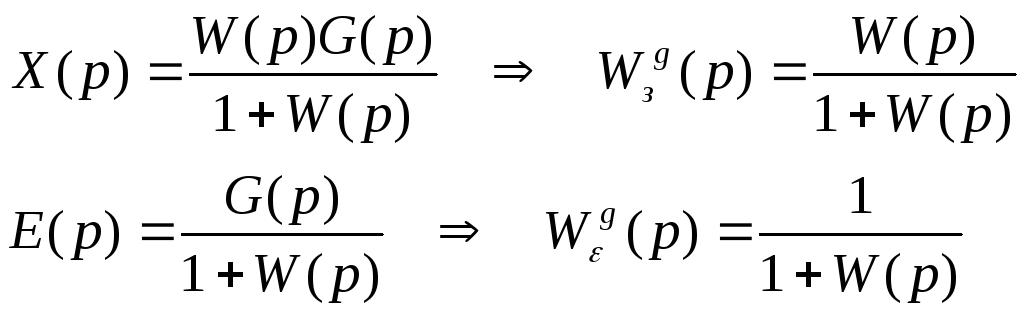
Коэффициенты ошибок
Для определения ошибки как функции
времени воспользуемся её изображением
по Лапласу:
![]() (3.3)
(3.3)
где
![]()
– передаточная функция замкнутой
системы относительно ошибки по
управляющему воздействию;
![]() – передаточная функция разомкнутой
– передаточная функция разомкнутой
системы;
![]() – изображение по Лапласу управляющего
– изображение по Лапласу управляющего
воздействия.
Передаточная
функция ошибки может быть разложена в
ряд Маклорена по степени p:
![]() (3.4)
(3.4)
где

(3.5)
C
учётом (3.4) выражение (3.3) для изображения
ошибки можно представить в виде:
![]() (3.6)
(3.6)
Следовательно,
![]() (3.7)
(3.7)
Разложение
передаточной функции ошибки в ряд
производилось относительно точки
![]() ,
,
что соответствует большим значениям
t. Значит выражение (3.7)
становится справедливым лишь спустя
некоторое время после приложения
воздействия, т.е. представляет собой
установившуюся (вынужденную) составляющую
ошибки.
Задача
получения требуемой точности обычно
формулируется на основе требований к
величине ошибки при управляющих
воздействиях определённого вида, в той
или иной степени характерных для работы
системы. Если найденная по (3.7) составляющая
ошибки в течение всего интервала
изменения не выходит за допустимые
пределы
![]() ,
,
(3.8)
то для
данного управляющего воздействия
требуемая динамическая точность
обеспечивается.
В
тех случаях, когда управляющее воздействие
постоянно
![]() ,
,
все члены ряда кроме первого равны нулю.
Поэтому статическая ошибка воспроизведения
равна
![]() (3.9)
(3.9)
Постоянные
![]() называются
называются
коэффициентами ошибок;
C0
– коэффициент ошибки
по воздействию;
C1
– по скорости изменения
воздействия;
C2
– по ускорению и т.д.
Передаточная функция системы в разомкнутом
состоянии всегда может быть приведена
к виду:
![]() (3.10)
(3.10)
Используя (3.10), (3.4), (3.5), определим несколько
первых коэффициентов ошибок для различных
систем:
1.
Система статическая (n
= 0)
![]() (3.11)
(3.11)
![]()
В
формуле (3.11) k – коэффициент
усиления системы в разомкнутом состоянии.
При условии
![]()
выражение (3.7) можно приближенно
представить в виде
![]()
(3.12)
где
![]()
– коэффициент астатизма статической
системы;
Dw
— добротность статической
системы по скорости;
De
— добротность статической
системы по ускорению.
Эти коэффициенты связаны следующими
соотношениями с коэффициентами ошибок:
![]()
![]()
![]() (3.13)
(3.13)
2.
Система астатическая (n
= 1)
![]()
![]() (3.14)
(3.14)
Тогда
выражение (3.7) приближённо можно записать:
![]() (3.15)
(3.15)
где
Dw
и De
— коэффициенты
добротностей по скорости и ускорению
для системы с астатизмом первого порядка.
Коэффициенты ошибок связаны с добротностями
по (3.7) и (3.15):
![]()
![]()
![]() (3.16)
(3.16)
3.
Система автоматического регулирования
с астатизмом второго порядка (n
= 2)
![]()

![]() (3.17)
(3.17)
Запишем
3.7 приближенно:
![]() (3.18)
(3.18)
где
De
— коэффициенты
добротности по ускорению системы с
астатизмом второго порядка. Очевидно,
что:
![]() (3.19)
(3.19)
Можно
отметить, что формулы (3.12), (3.15), (3.18)
пригодны для вычисления ошибок в системах
автоматического регулирования при
любых сигналах, поступающих на их вход,
когда спектр входного сигнала заключён
в полосе низких частот (до w1).
Выражения (3.14) и (3.17) подтверждают
сказанное о том, что в астатических
системах статическая ошибка отсутствует.
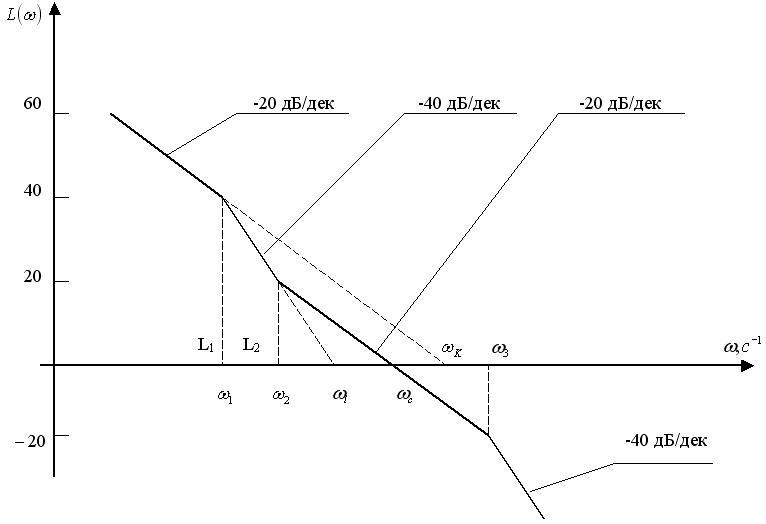
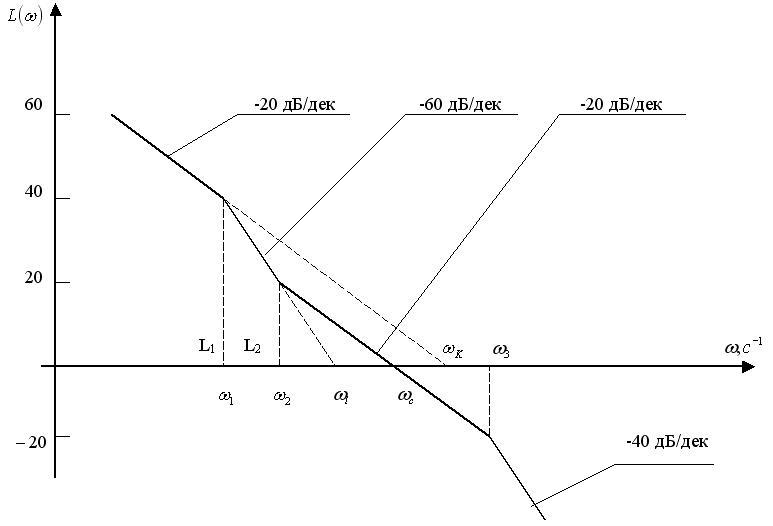
Определение коэффициентов ошибок в
системах автоматического регулирования
с помощью ЛАХ
Суть определения коэффициентов ошибок
по этому методу заключается в том, что
последние зависят от постоянных времени
звеньев системы, с которыми однозначно
связаны сопрягающие частоты ЛАХ
разомкнутой системы.
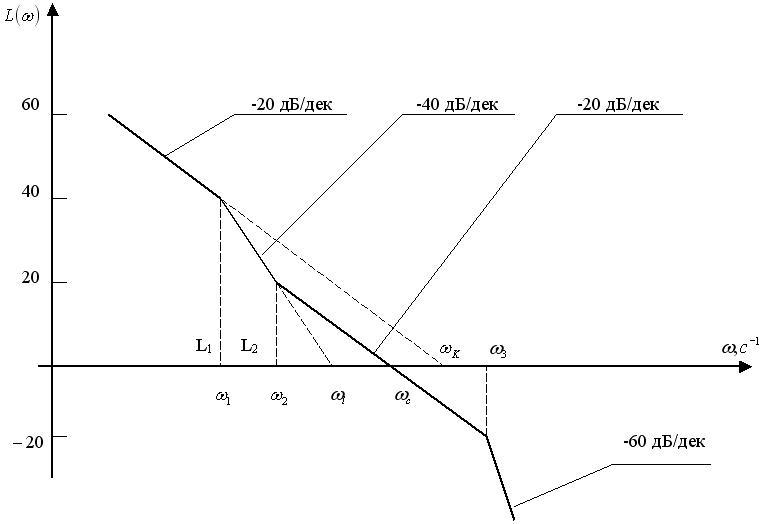
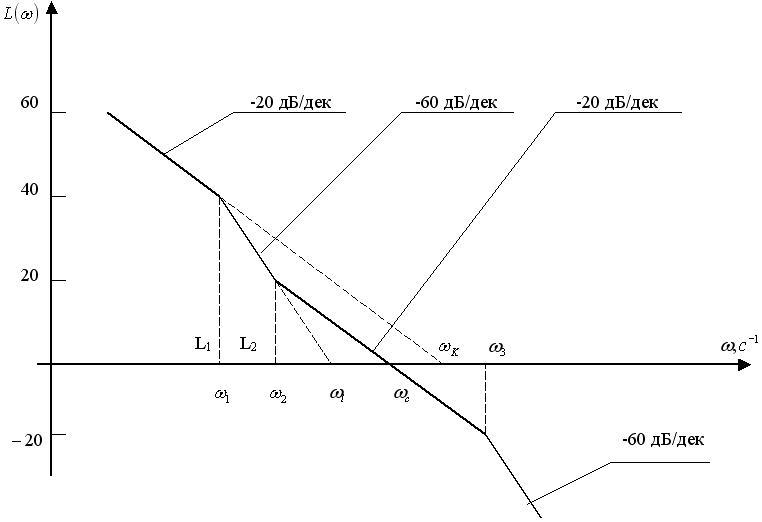
На
рис. (3.3) показаны характеристики четырех
типов систем автоматического регулирования
с астатизмом первого порядка.
1)
2)
3)
4)
Передаточные
функции этих систем и коэффициенты
добротности Dw
и De
приведены в таблице
(3.1).
|
Тип |
Передаточная |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
Коэффициент
добротности по скорости для систем всех
типов:
![]()
Однако
эти величины можно рассчитывать
приближённо через частоты wk
и wl,
которые определяются непосредственно
по ЛАХ:
![]() ,
,
![]()
– для системы 1 типа.
(3.20)
![]() –для системы 2 типа.
–для системы 2 типа.
В
ряде практических задач передаточные
функции разомкнутых систем имеют вид,
отличный от приведённого в таблице
(3.1). Например:
![]() (3.21)
(3.21)
Тогда
вместо постоянных времени T3
и T4
,T1 и
T2
можно ввести:
![]()
![]()
приводя
в этом случае передаточную функцию
(3.21) ко второму типу (рис 3.3):

Ошибка
в такой замене при построении ЛАХ не
превышает 2дБ.
Инвариантность
системы к воздействию
Идеальной
в смысле точности воспроизведения была
бы система, которая в точности
воспроизводила управляющее воздействие.
Такие свойства системы называют
инвариантностью к сигналу (независимостью
от сигнала). Если система инвариантна
по отношению к любому воздействию,
независимо от его характера, то имеет
место полная инвариантность. Для
получения полной инвариантности
необходимо, чтобы передаточная функция
ошибки по управляющему воздействию
была тождественно равна нулю. Это
требование полной инвариантности
приводит к необходимости выполнения
условия
![]() .
.
Однако условие неосуществимо не только
в силу технической трудности реализации
большого коэффициента усиления системы
k, при котором
![]() ,
,
но и вследствие нарушения устойчивости
при увеличении коэффициента усиления.
Можно говорить либо о приближённой
инвариантности («инвариантности до
e»),
либо о частичной инвариантности.
При
частичной инвариантности обеспечивается
равенство нулю лишь вынужденной
составляющей ошибки и только при
воздействиях определённого вида.
Примером частичной инвариантности
может рассматриваться случай, когда в
системе, обладающей астатизмом n-го
порядка, приложено воздействие, не
имеющее производных выше n-1
порядка. При этом вынужденная составляющая
ошибки равна нулю, так как за счёт
астатизма системы отсутствуют коэффициенты
ошибок от С0 до
Сn-1.
Частичная инвариантность к постоянному
во времени воздействию (уменьшение
статической ошибки) осуществляется за
счёт обеспечения астатизма, а именно
введения в систему интегрирующих
звеньев. При этом, для компенсации
возмущающего воздействия, интегрирующие
звенья вводятся в систему до точки его
приложения.
Однако обязательно требуется проверка
устойчивости системы, так как могут
оказаться необходимыми меры по сохранению
запасов устойчивости системы
автоматического регулирования.
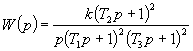
Астатизм системы можно получить с
помощью включения в прямую цепь
изодромного звена с передаточной
функцией
![]()
где
![]() – постоянная времени
– постоянная времени
изодрома.
Если
Tn достаточно
велика, то запас устойчивости может
быть сохранен неизменным. Уменьшение
передаточного коэффициента разомкнутой
системы должно быть скомпенсировано
увеличением коэффициента усиления
усилителя.
Астатизм систем автоматического
регулирования относительно задающего
воздействия можно обеспечить более
простыми способами: неединичной обратной
связью и масштабированием.
Если
в системе (рис. 3.4, а)

выполнить
обратную связь с ,
где k – передаточный
коэффициент прямой цепи системы, то
![]() ,
,
и система будет астатической относительно
задающего воздействия.
В системе
(рис. 3.4, б)
при
![]() ,
,
где к – передаточный коэффициент
разомкнутой системы, получаем
![]() ,
,
и система является также астатической
относительно задающего воздействия.
Повышение точности системы автоматического
регулирования путём применения
комбинированного управления
Точность
систем повышается путём компенсации
влияния сигналов управления и возмущения
за счёт применения комбинированного
управления. В результате этого
увеличивается порядок астатизма.
Структурные схемы систем автоматического
управления с комбинированным управлением
показаны на рисунке (3.1, в,г). Первая из
них компенсирует действие управляющего
сигнала, вторая – действие возмущения.
Составим передаточные функции обоих
систем регулирования относительно
ошибки.
Для
системы, изображённой на рисунке (3.1,
в), имеем:
![]() (3.22)
(3.22)
Нетрудно показать, что выбрав
![]() (3.23)
(3.23)
получим
![]() .
.
Таким
образом, выбирая (3.23), удаётся создать
систему, полностью инвариантную к
управляющему воздействию, т.е. получить
ошибку, не зависящую от управляющего
воздействия на систему. Однако практически
довольно трудно обеспечить полное
удовлетворение условию (3.23). Поэтому
выбирают другую компенсирующую
передаточную функцию Wk(p),
которая повышает порядок астатизма
системы.
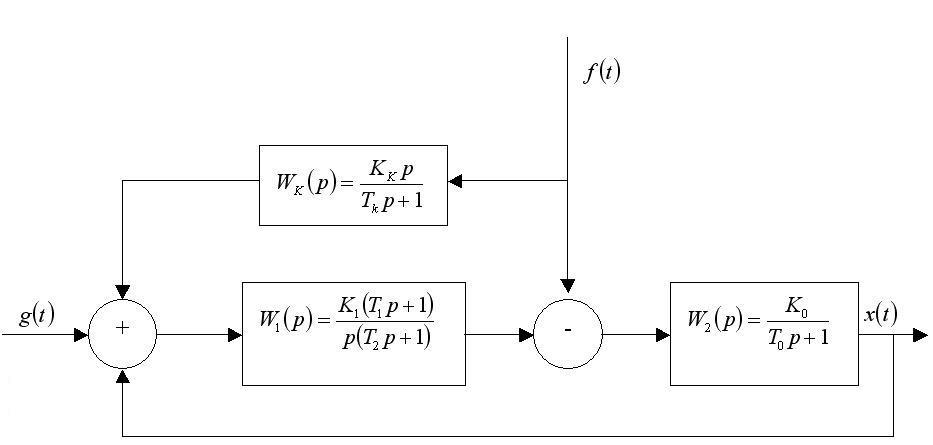
Перейдём
к рассмотрению систем автоматического
регулирования по рисунку (3.1, г), считая
что
![]() .
.
Тогда
![]()
и передаточная функция системы
относительно ошибки по возмущаемому
воздействию запишется так:
![]() (3.24)
(3.24)
Нетрудно найти из (3.24) условие инвариантности
в виде:
![]() (3.25)
(3.25)
Итак,
при соблюдении условия (3.25) имеем систему,
полностью инвариантную к возмущающему
воздействию. Однако на практике обеспечить
условие (3.25) так же трудно, как и условие
(3.23), т.к. физически реализуема лишь такая
Wk(P),
у которой степень числителя не выше
степени знаменателя. При частичном
удовлетворении условию (3.25) удаётся
повысить порядок астатизма систем
относительно возмущающего воздействия.
Следует отметить, что компенсирующая
цепь не влияет на устойчивость замкнутого
контура, однако она сама должна быть
устойчивой.
Такое комбинированное регулирование
используется в системах для уменьшения
влияния сильного возмущения, если это
возмущение доступно измерению.
Рассмотрим
пример получения частичной инвариантности
систем. Исходная система представленная
на рисунке (3.5, а) имеет астатизм первого
порядка и
![]() .
.
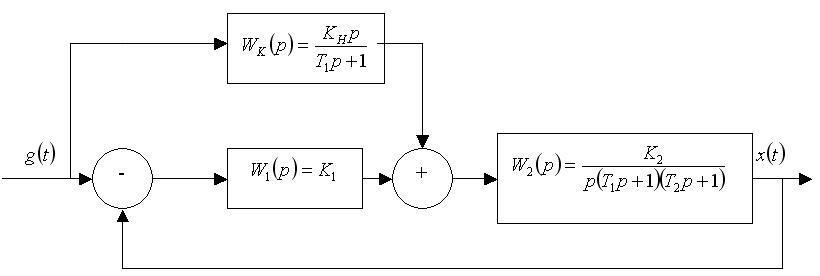
Поставив
задачу частичного удовлетворения
условию (3.23) примем:
![]()
![]()
при
этом удаётся повысить астатизм системы
до n
= 2 и получить С1
= 0.
В
системе на рисунке (3.5, б) при условии,
что Kk = 1/K1
и T2
+ Tk
= T1,
удаётся повысить точность системы по
возмущающему воздействию за счёт
увеличения порядка астатизма системы
на две единицы.
Вид передаточной функции позволяет
судить о том, является ли система
статической или астатической . Причем
рассматривается астатизм системы как
по управляющему, так и по возмущающему
воздействию.
Для
того, чтобы рассматривать астатизм
системы вводится понятие передаточной
функции ошибки по управляющему и
возмущающему воздействию.
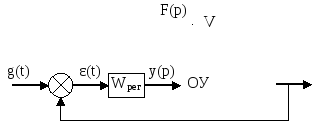
Пусть система состоит из регулятора и
объекта управления

Пусть
она описывается линейными дифференциальными
уравнениями, которые подверглись
преобразованию Лапласа:

Решая
данную систему, можно получить уравнение
для выходного сигнала системы:

Если в
качестве выходной величины рассматривать
ошибку, то при решении системы уравнений
получим уравнение для нахождения ошибки:
![]()
По
управляющему воздействию:
![]()
Тогда
с учетом * и ** получим:
По
возмущающему воздействию:
![]()
Тогда
![]()
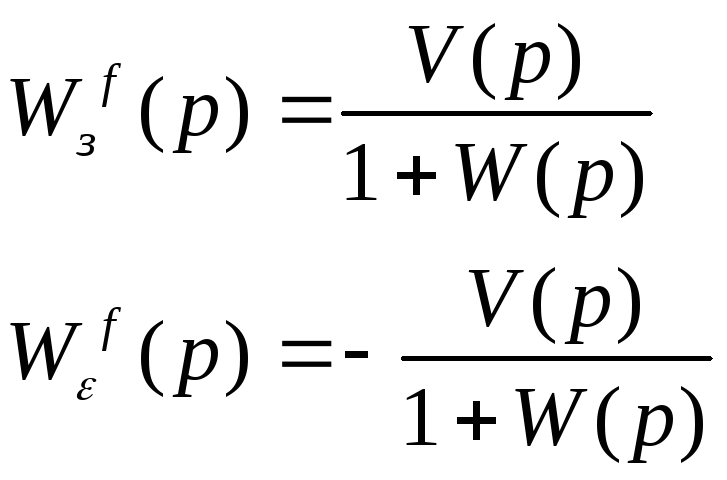

![]()
Автор скрыт
05.05.2020.
Тест. Прочее, Прочее
Внимание! Все тесты в этом разделе разработаны пользователями сайта для собственного
использования.
Администрация сайта не
проверяет возможные ошибки,
которые могут встретиться в тестах.
Контрольный тест по теории автоматического управления
Список вопросов теста
Вопрос 1
По виду управляющего сигнала, вырабатываемого автоматическим регулятором АСР бывают
Варианты ответов
- непрерывные
- дискретные
- релейные
Вопрос 2
Частотные характеристики можно получить из:
Варианты ответов
- функции Хевисайда
- дельта-функции
- передаточной функции
Вопрос 3
Если объект подчиняется принципу суперпозиции, то он считается:
Варианты ответов
- стационарным
- линейным
- нелинейным
Вопрос 4
Замкнутая АСР с обратной связью реализует принцип регулирования:
Варианты ответов
- по возмущению
- по отклонению
- по заданию
Вопрос 5
Целью регулирования является
Варианты ответов
- поддержание регулируемого параметра на заданном значении
- определение ошибки регулирования
- выработка управляющих воздействий
Вопрос 6
Передаточной функцией системы называется
.
Варианты ответов
- отношение выходного сигнала ко входному сигналу
- отношение преобразованного по Лапласу выходного сигнала к преобразованному по Лапласу входному сигналу
- отношение преобразованного по Лапласу входного сигнала к преобразованному по Лапласу выходному сигналу
Вопрос 7
Зависимость выходного параметра объекта от времени при подаче на вход дельта-функции называется:
Варианты ответов
- статической характеристикой
- импульсной характеристикой
- частотной характеристикой
Вопрос 8
Зависимость выходного параметра объекта от входного называется:
Варианты ответов
- статической характеристикой
- импульсной характеристикой
- динамической характеристикой
Вопрос 9
Целью функционирования следящей АСР является
Варианты ответов
- поддержание регулируемого параметра на заданном постоянном значении с помощью управляющих воздействий на объект
- изменение регулируемой величины в соответствии с заранее неизвестной величиной на входе АСР
- изменение регулируемой величины в соответствии с заранее заданной функцией
Вопрос 10
Варианты ответов
- передаточную функцию
- переходную функцию
- амплитудно-фазовую характеристику
Ошибка — регулирование
Cтраница 1
Ошибка регулирования существует, но она не является ф-цией нагрузки и не наз. При всяком же отклонении х от заданного значения равновесие регулятора нарушается и начинается непрерывное изменение у.
[2]
Ошибка регулирования определяется величиной шага перемещения цапфы валка при срабатывании реле. Верхнее и нижнее положение подвижного валка, как это было отмечено ранее, ограничивается конечными выключателями.
[4]
Ошибка регулирования характерна для статических систем. Для астатических систем она равна нулю.
[5]
Ошибкой регулирования называется разность между требуемым законом изменения регулируемой величины и его действительным законом изменения.
[6]
Дисперсия ошибки регулирования служит критерием качества АСР при случайных входных сигналах.
[7]
В результате ошибка регулирования бесконечно быстро сводится к нулю.
[9]
Для определения ошибки регулирования по возмущающему воздействию структурную схему на рис. 8 — 20 а необходимо преобразовать.
[10]
Оно пропорционально ошибке регулирования и может быть использовано в качестве сигнала управления схемы регулирования напряжения.
[12]
Желательно, чтобы ошибка регулирования была бы при этом уровне минимальна. Выражение (7.33) определяет текущее значение ошибки, каким-то образом распределенное по партии деталей, обработанных данной системой, причем распределение ошибки связано с распределением твердости.
[13]
Статическим системам свойственна ошибка регулирования: они никогда не возвращают регулируемый параметр к заданному значению.
[14]
Желательно, чтобы ошибка регулирования была бы при этом уровне минимальна. Выражение (7.33) определяет текущее значение ошибки, каким-то образом распределенное по партии деталей, обработанных данной системой, причем распределение ошибки связано с распределением твердости.
[15]
Страницы:
1
2
3
4
5