
Рабочая инструкция
Системы защиты от ошибок (Poka Yoke)
1.ЦЕЛЬ
Установить порядок разработки и использования систем защиты от ошибок при выпуске продукции.
2.ТЕРМИНЫ, ОПРЕДЕЛЕНИЯ И СОКРАЩЕНИЯ
- Poka-Yoke (яп., произносится «пока-ёкэ»; рус. — защита от ошибок) — один из элементов системы бережливого производства, позволяющий операторам при работе избежать ошибок в результате невнимательности. (установка неправильной детали, пропуск детали, установка детали другой стороной и т.д.).
- НД — нормативный документ.
- ОГТ — отдел главного технолога.
- ООО — отдел обслуживания оборудования.
- ДР — дирекция по развитию.
Ответственность за включение систем защиты от ошибок в техпроцесс сборки изделий несут сотрудники ДР. За функционирование и проверку их работоспособности — ООО. В случае возникновения необходимости применения дополнительных систем защиты от ошибок в ходе массового производства, ответственность за их разработку и внедрение несут сотрудники ОГТ.
3.ОПИСАНИЕ
Системы защиты от ошибок разделяют на:
- сигнализирующие (без остановки производства) — обнаруживающие ошибку и предупреждающие о ней, не разрешая осуществлять передачу дефектного изделия на следующую стадию производства;
- блокирующие (с остановкой производства) — не позволяющие совершить ошибку.
Наличие системы, благодаря которой операцию можно выполнить только одним единственным, правильным способом, в результате чего неправильная сборка исключается, и дефект просто не может возникнуть, — это идеальный пример проведения предупреждающих действий.
Исторически первый случай осознанного применения систем Poka Yoke — это изобретение ткацкого станка, который останавливался при обрыве нити, и таким образом не был способен производить дефектную ткань.
Другие примеры защиты от ошибок:
- При конструировании детали придание ей такой формы, которая позволяет установить ее только в правильном положении. Вариант, — уникальное размещение реперных знаков на разных печатных платах одинаковых габаритов для автоматического их распознавания в станках.
- Установка над контейнерами с деталями фотоэлементов, настроенных таким образом, что если оператор, доставая деталь, не пересек рукой световой луч, то изделие не будет передано на следующую стадию.
- Применение для комплектующих специальных ящиков с ячейками, форма которых совпадает с формой комплектующих. Что позволяет обеспечивать применение правильных деталей при сборке.
- Остановка станков при сбоях с включением звукового и/или светового сигнала для привлечения внимания оператора.
- Печать идентификационных этикеток только при получении положительного результата тестирования.
- Приведение в действие пресса одновременным нажатием двух кнопок, разнесенных друг от друга на расстояние, не позволяющее нажать их одной рукой (предотвращается попадание рук оператора под прессу
Рисунок 1 — пример устройства контактного типа для защиты от ошибок.

Системы защиты от ошибок следует устанавливать в тех местах техпроцесса, в которых невнимательность оператора может повлиять на значение ключевых характеристик процесса или собираемого продукта.
Места установки и использования выявляются при проведении FMEA — анализа причин и последствий потенциальных отказов, который проводится при проектировании любого нового технологического процесса или при его модернизации.
Проанализировав существующие процессы и оборудование с целью определить те их элементы, которые имеют решающее значение для критических характеристик. Также можно определить необходимость и места использования инструментов Poka-Yoke.
Для наиболее эффективного применения систем защиты от ошибок следует вовлекать операторов, выполняющих изучаемые операции. В рабочие группы по проведению FMEA, а также по выявлению и устранению ошибок и дефектов и реализации идеи встроенного качества (не бери — не делай – не передавай).
Работа начинается с выявления характера реальных или предполагаемых дефектов. Затем определяются их причины (с помощью метода «5 почему») и выявляются параметры, изменяемые одновременно с действием этой причины. После аналитической стадии переходят к стадии творческой, придумывая, как исключить саму возможность появления дефекта. Или хотя бы предупредить о возможном его появлении. В результате появляется идея системы Poka-Yoke.
Места установки систем защиты от ошибок помечаются в карте потока процесса специальным значком «PY»
B планах управления следует предусматривать регулярную проверку работоспособности установленных систем защиты от ошибок (обязательно — при каждом запуске процесса сборки изделий).
5.ССЫЛКИ
- СТП «Технологическая подготовка производства и управление технологической документацией»
- СТП «План управления»
- СТП «Порядок подачи, оценки и реализации кайдзен-предложений»
- CTП «FMEA»
- РИ «Определение ключевых характеристик продуктов и процессов»
- Ф «Карта потока процесса»
- Ф «5 почему»
Изобретение относится к вычислительной технике, а именно к технике связи. Технический результат заключается в повышении качества приема данных и повышение пропускной способности канала за счет снижения числа переспросов. Устройство содержит: приемный блок, первый и второй элементы И, первый, второй и третий элементы ИЛИ, первый и второй блоки декодирования, первый, второй и третий элементы ЗАПРЕТ, первый элемент НЕ и счетчик стирания, а также информационные вход и выход устройства, его входы сброса и синхронизации и его выход переспроса, вход приемного блока. 1 ил.
Изобретение относится к технике связи и вычислительной технике и может быть использовано в аппаратуре передачи данных.
Известно устройство защиты от ошибок [Авт. св. СССР №1683180 по МПК Н03М 13/00 от 04.04.1989 г.], содержащее приемный блок, информационные вход и выход и блок анализа принимаемой информации.
Недостатком этого устройства является относительно невысокое качество приема информации с значительным переспросом информации и снижением пропускной способности канала.
Наиболее близким по технической сущности к заявленному устройству защиты от ошибок (УЗО) является устройство защиты от ошибок по авторскому свидетельству №1765899 МПК Н03М 13/00 за 1992 г., бюл. №36, содержащее приемный блок, первый и второй элементы И, первый, второй и третий элементы ИЛИ, первый и второй блоки декодирования, первый, второй и третий элементы ЗАПРЕТ, элемент НЕ и счетчик стирания, входом устройства является вход приемного блока, информационный выход приемного блока соединен с первыми входами первых элементов ИЛИ и И, выход стираний приемного блока подключен к второму входу первого элемента ИЛИ, через первый элемент НЕ ко входу первого элемента И и к счетному входу счетчика стираний, вход обнуления которого является входом сброса устройства, при этом вход первого блока декодирования соединен с выходом первого элемента И, вход второго блока декодирования соединен с выходом первого элемента ИЛИ, а информационные выходы первого и второго блоков декодирования соединены с информационными входами первого и второго элементов ЗАПРЕТ соответственно, выходы первого и второго элементов ЗАПРЕТ соединены со входами второго элемента ИЛИ, выход которого соединен со входом третьего элемента ЗАПРЕТ, входы синхронизации первого и второго блоков декодирования объединены и являются входом синхронизации устройства, контрольные выходы первого и второго блоков декодирования подключены к запрещающим входам соответственно первого и второго элементов ЗАПРЕТ и к входам второго элемента И, выход переполнения счетчика соединен с входом третьего элемента ИЛИ.
Недостатком известного устройства является относительно невысокое качество приема информации, следствием чего является значительное число переспросов и недостаточная пропускная способность канала.
Техническим результатом и целью изобретения является повышение качества приема данных и повышение пропускной способности канала за счет снижения числа переспросов.
Указанный технический результат достигается тем, что устройство защиты от ошибок, содержащее приемный блок, первый и второй элементы И, первый, второй и третий элементы ИЛИ, первый и второй блоки декодирования, первый, второй и третий элементы ЗАПРЕТ, первый элемент НЕ и счетчик стирания, а также информационные вход и выход устройства, его входы сброса и синхронизации и его выход переспроса, информационным входом устройства является вход приемного блока, информационный выход которого соединен с первыми входами первых элементов ИЛИ и И, выход стираний приемного блока соединен со вторым входом первого элемента ИЛИ, со счетным входом счетчика стираний и через первый элемент НЕ с вторым входом первого элемента И, вход обнуления счетчика стираний является входом сброса устройства, при этом вход первого блока декодирования соединен с выходом первого элемента И, вход второго блока декодирования соединен с выходом первого элемента ИЛИ, а информационные выходы первого и второго блоков декодирования соединены с информационными входами первого и второго элементов ЗАПРЕТ соответственно, выходы первого и второго элементов ЗАПРЕТ соединены с соответствующими входами второго элемента ИЛИ, выход которого соединен с первым входом третьего элемента ЗАПРЕТ, входы синхронизации первого и второго блоков декодирования объединены и являются входом синхронизации устройства, контрольные выходы первого и второго блоков декодирования подключены к запрещающим входам соответственно первого и второго элементов ЗАПРЕТ и к первому и второму входам второго элемента И, выход переполнения счетчика соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом второго элемента И, выход элемента ИЛИ соединен с выходом переполнения устройства, в устройство введены третий блок декодирования, четвертый элемент ЗАПРЕТ, второй элемент НЕ, и четвертый элемент ИЛИ, вход третьего блока декодирования соединен с выходом приемного блока, вход синхронизации третьего блока декодирования соединен со входом синхронизации устройства, а выход третьего блока декодирования соединен с информационным входом четвертого элемента ЗАПРЕТ, информационный выход которого соединен с первым входом четвертого элемента ИЛИ, контрольный выход третьего блока декодирования соединен с запрещающим входом четвертого элемента ЗАПРЕТ, с входом второго элемента НЕ и с третьим входом второго элемента И, выход второго элемента НЕ соединен с входом третьего элемента ЗАПРЕТ, информационный выход которого соединен со вторым входом четвертого элемента ИЛИ, выход которого является информационным выходом устройства, а выход третьего элемента ИЛИ является выходом переспроса устройства.
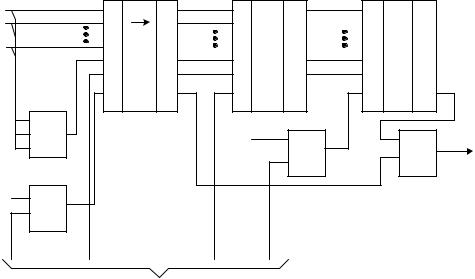
На фиг.1 представлена структурная схема устройства.
Устройство содержит приемный блок 1, первый — третий блоки декодирования 2, 3, 4, первый и второй элементы И 5, 6, первый — четвертый элементы ИЛИ 7, 8, 9, 10, первый — четвертый элементы ЗАПРЕТ 11, 12, 13, 14, первый и второй элементы НЕ 15, 16 и счетчик стираний 17, а также информационный вход 18, вход синхронизации 19, вход сброса 20, информационный выход 21, выход переспроса 22.
Устройство защиты от ошибок, содержащее приемный блок 1, первый и второй элементы И 5, 6, первый, второй и третий элементы ИЛИ 7, 8, 9, первый и второй блоки декодирования 2, 3, первый, второй и третий элементы ЗАПРЕТ 11, 12, 13, первый элемент НЕ 15 и счетчик стирания 17, а также информационные вход 18 и выход устройства 21, его входы сброса 20 и синхронизации 19 и его выход переспроса 22, информационным входом устройства является вход приемного блока, информационный выход которого соединен с первыми входами первых элементов ИЛИ 7 и И 5, выход стираний приемного блока 1 соединен со вторым входом первого элемента ИЛИ 7, со счетным входом счетчика стираний 17 и через первый элемент НЕ 15 с вторым входом первого элемента И 5, вход обнуления счетчика стираний является входом сброса устройства, при этом вход первого блока декодирования 2 соединен с выходом первого элемента И 5, вход второго блока декодирования 3 соединен с выходом первого элемента ИЛИ 7, а информационные выходы первого и второго блоков декодирования 2, 3 соединены с информационными входами первого и второго элементов ЗАПРЕТ 11, 12 соответственно, выходы первого и второго элементов ЗАПРЕТ 11, 12 соединены с соответствующими входами второго элемента ИЛИ 8, выход которого соединен с первым входом третьего элемента ЗАПРЕТ 13, входы синхронизации первого и второго блоков декодирования 2, 3 объединены и являются входом синхронизации устройства, контрольные выходы первого и второго блоков декодирования подключены к запрещающим входам соответственно первого и второго элементов ЗАПРЕТ 11, 12 и к первому и второму входам второго элемента И 6, выход переполнения счетчика соединен с первым входом третьего элемента ИЛИ 9, второй вход которого соединен с выходом второго элемента И 6, выход элемента ИЛИ 9 соединен с выходом переполнения устройства, в устройство введены третий блок декодирования 4, четвертый элемент ЗАПРЕТ 14, второй элемент НЕ 16, и четвертый элемент ИЛИ 10, вход третьего блока декодирования 4 соединен с выходом приемного блока 1, вход синхронизации третьего блока декодирования 4 соединен со входом синхронизации устройства, а выход третьего блока декодирования 4 соединен с информационным входом четвертого элемента ЗАПРЕТ 14, информационный выход которого соединен с первым входом четвертого элемента ИЛИ 10, контрольный выход третьего блока декодирования 4 соединен с запрещающим входом четвертого элемента ЗАПРЕТ 14, с входом второго элемента НЕ 16 и с третьим входом второго элемента И 6, выход второго элемента НЕ 16 соединен с входом третьего элемента ЗАПРЕТ 13, информационный выход которого соединен со вторым входом четвертого элемента ИЛИ 10, выход которого является информационным выходом устройства 21, а выход третьего элемента ИЛИ 9 является выходом переспроса устройства 22.
Все используемые в устройстве элементы представляют собой простейшую двоичную логику (кроме приемного блока 1 и блоков 2, 3, 4 декодирования), широко применяемую в российской промышленности.
В качестве приемного блока 1 может быть использован широко применяемый модем, имеющий схему анализа символов и выход стираний, на котором появляется одноименный сигнал при отрицательном анализе.
В качестве блоков 2, 3 и 4 декодирования могут быть использованы, также широко применяемые полиномиальные (алгебраические) схемы, которые реализуемы с помощью простейшей двоичной логики.
Устройство работает следующим образом.
Очередной символ принимаемой кодовой комбинации с информационного выхода приемного блока 1 поступает на вход блока декодирования 4 непосредственно, через элемент И 5 на вход блока декодирования 2 и через элемент ИЛИ 7 на вход блока декодирования 3. На второй вход элемента ИЛИ 7 и на второй вход элемента И 5 через элемент НЕ 15 поступает импульс с выхода стираний приемного блока 1, если достоверность принятого символа ниже заданной. На выходе элемента ИЛИ 7 вместо символа “0”, сопровождаемого символом стирания, формируется символ “1”, а на выходе элемента И 5 вместо символа “1”, сопровождаемого импульсом стирания, формируется символ “0”. Все остальные символы принимаемой комбинации записываются в блоки декодирования 2 и 3, а также в блок декодирования 4 без изменений.
Блоки декодирования 2, 3 и 4 накапливают поступающие символы на время приема всей кодовой комбинации и затем делением комбинации на ошибкообнаруживающий полином проверяют принадлежность принятой комбинации к множеству разрешенных. По сигналу цикловой синхронизации с входа 19 информационные символы с первых выходов блоков декодирования 2, 3 и 4 поступают на информационные входы ЗАПРЕТ 11, 12, 13, на запрещающие входы которых со вторых выходов блоков декодирования 2, 3 и 4 подается сигнал «ОШИБКА», если ошибкообнаруживающий полином обнаруживает ошибку.
Элементы ЗАПРЕТ 11, 12 и 13 производят выборку информации с выхода того блока декодирования 2, 3, 4, в котором не обнаружена ошибка.
Если принимаемый блоком 1 символ искажен и выработан импульс на выходе стираний, но информационное значение символа не изменилось, устройство по авт. св. №1765899 не обеспечит правильного приема кодограммы. Предлагаемое устройство за счет декодирования принимаемых данных блоком 4 обеспечит правильный прием кодограммы. Принятая информация поступит через элемент ИЛИ 10 на информационный выход устройства 21, а сигнал правильного декодирования кодограммы с контрольного выхода блока декодирования 4 через элемент НЕ 16, поступив на элемент ЗАПРЕТ 14, предотвратит передачу кодограмм из блоков декодирования 2 и 3 на выход устройства. Если же безошибочного декодирования кодограммы блоком 4 не случилось, все положительные возможности коррекции ассиметричных искажений и декодирования кодограмм блоками декодирования 2 и 3 остаются в силе.
Элемент И 6 формирует обобщенный сигнал “ошибка обнаружения”, если в блоках 2, 3, 4 одновременно обнаружена ошибка по результатам декодирования. Сигнал “ошибка обнаружения” поступает на вход элемента ИЛИ 9 для переспроса информации.
За время приема кодовой комбинации счетчик 17 суммирует количество посимвольных искажений и, если последнее превышает заданную величину, формирует на своем выходе сигнал “стирание кодограммы”, поступающий на вход элемента ИЛИ 9, который формирует сигнал переспроса на выходе 22.
Рассмотренное устройство в сравнении с прототипом обладает более высокой информативностью, так как в условиях функционирования реального дискретного канала, не только обеспечивает адаптивную коррекцию ассиметричных переходов “0” в «1» или “1” в “0”, но правильный прием искаженных символов, не изменивших своего значения. Сохраняя требуемую достоверность декодирования, данное устройство защиты от ошибок повышает качество приема данных и пропускную способность канала за счет снижения числа переспросов.
Устройство защиты от ошибок, содержащее приемный блок, первый и второй элементы И, первый, второй и третий элементы ИЛИ, первый и второй блоки декодирования, первый, второй и третий элементы ЗАПРЕТ, первый элемент НЕ и счетчик стирания, а также информационные вход и выход устройства, его входы сброса и синхронизации и его выход переспроса, информационным входом устройства является вход приемного блока, информационный выход которого соединен с первыми входами первых элементов ИЛИ и И, выход стираний приемного блока соединен со вторым входом первого элемента ИЛИ, со счетным входом счетчика стираний и через первый элемент НЕ с вторым входом первого элемента И, вход обнуления счетчика стираний является входом сброса устройства, при этом вход первого блока декодирования соединен с выходом первого элемента И, вход второго блока декодирования соединен с выходом первого элемента ИЛИ, а информационные выходы первого и второго блоков декодирования соединены с информационными входами первого и второго элементов ЗАПРЕТ соответственно, выходы первого и второго элементов ЗАПРЕТ соединены с соответствующими входами второго элемента ИЛИ, выход которого соединен с первым входом третьего элемента ЗАПРЕТ, входы синхронизации первого и второго блоков декодирования объединены и являются входом синхронизации устройства, контрольные выходы первого и второго блоков декодирования подключены к запрещающим входам соответственно первого и второго элементов ЗАПРЕТ и к первому и второму входам второго элемента И, выход переполнения счетчика соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом второго элемента И, выход элемента ИЛИ соединен с выходом переполнения устройства, отличающееся тем, что в устройство введены третий блок декодирования, четвертый элемент ЗАПРЕТ, второй элемент НЕ, и четвертый элемент ИЛИ, вход третьего блока декодирования соединен с выходом приемного блока, вход синхронизации третьего блока декодирования соединен со входом синхронизации устройства, а выход третьего блока декодирования соединен с информационным входом четвертого элемента ЗАПРЕТ, информационный выход которого соединен с первым входом четвертого элемента ИЛИ, контрольный выход третьего блока декодирования соединен с запрещающим входом четвертого элемента ЗАПРЕТ, с входом второго элемента НЕ и с третьим входом второго элемента И, выход второго элемента НЕ соединен с входом третьего элемента ЗАПРЕТ, информационный выход которого соединен со вторым входом четвертого элемента ИЛИ, выход которого является информационным выходом устройства, а выход третьего элемента ИЛИ является выходом переспроса устройства.
Poka-yoke (звучит как пока ёкэ) — забавный на слух японский термин, который обозначает один из инструментов бережливого производства. Оказывается, мы сталкиваемся с ним каждый день. Только на русском он звучит как «принцип нулевой ошибки» или «защита от дурака».
На английский poka-yoke дословно переводится как «avoid mistakes», т.е. «избегать ошибок». А на практике используется адаптированный перевод — mistake proofing или error proofing (защита от ошибок).
Poka-yoke — это методы и приспособления, которые помогают избежать ошибок или вовремя выявить их в процессе произодства при управлении проектом.
Устройства защиты от дурака предохраняют не просто от ошибок, а от ошибок, вызванных человеческим фактором:
- невнимательностью
- забывчивостью
- неосторожностью
- незнанием
- усталостью
- и даже саботажем.
Люди ошибаются, а poka-yoke приспособления не дают им допустить ошибку.
Принцип действия poka-yoke характеризуются:
- стопроцентным охватом проверки
- быстрой обратной связью
- низкой стоимостью и простотой.
Устройства poka-yoke работают по принципу pass no defect — не пропустить ни одного дефекта.
История создания методов poka-yoke
Poka-yoke призван устранить ошибки, основанные на человеческом факторе. Защита от ошибок использовалась на предприятиях в том или ином виде задолго до формирования концепции poka-yoke. Формализовали эту систему в Toyota.
Изобретатель методов poka-yoke — японский инженер Сигео Синго (1909-1990), эксперт в области производства и один из создателей производственной системы Toyota. Сигео Синго разработал подход Zero Quality Control (ZQC), или Zero Defects (ноль дефектов).
Zero defects метод основан на убеждении, что возникновению дефектов препятствует такой контроль производственного процесса, при котором дефект не возникнет, даже если машина или человек совершат ошибку.
Акцент контроля качества смещается с проверки готовой продукции на факт брака на предупреждение возникновения брака на каждом этапе производства.
При этом ключевая роль в предупреждении дефектов принадлежит производственному персоналу, который вовлечен в процесс обеспечения качества.
Poka-yoke или метод нулевой ошибки — один из ключевых аспектов ZQC. Система poka-yoke использует сенсоры или другие устройства, которые буквально не дают оператору совершить ошибку.
Они регулируют производственный процесс и предотвращают дефекты одним из двух способов:
- Система контроля — останавливает оборудование, когда возникает нарушение нормы, или блокирует заготовку зажимами, чтобы она не двигалась дальше по конвейеру, пока не будет обработана как требуется. Это более предпочтительная система, поскольку она не зависит от оператора.
- Система предупреждения — посылает оператору сигнал остановить машину или устранить проблему. Зависит от оператора, поэтому человеческий фактор не полностью исключен.
Poka-yoke не ищет виновных в ошибках, цель метода — найти и устранить слабые места в производственной системе, из-за которых ошибка стала возможной.
Уровни устройств poka-yoke
Способы защиты от дурака делятся на три уровня по возрастанию эффективности:
- 1-й уровень — обнаруживает несоответствие деталей или продукции. Система обнаруживает дефектную деталь, но не отбрасывает её.
- 2-й уровень — не допускает несоответствие. Система не дает обработать дефектную деталь на следующей стадии производственного процесса.
- 3-й уровень — конструкционная защита, например, изделие имеет такую конструкцию, что установить или собрать его непредусмотренным образом невозможно.
Принципы защиты от ошибок
Существует шесть принципов или методов защиты от ошибок. Они перечислены в порядке приоритета:
- Устранение: этот метод устраняет возможность ошибки путем редизайна продукта или процесса так, чтобы проблемная операция или деталь вообще больше не требовались.
Пример: упрощение продукта или соединение деталей, чтобы избежать дефектов продукта или сборки. - Замещение: чтобы повысить надежность, нужно заменить непредсказуемый процесс на более надежный.
Пример: Использование роботизации и автоматизации, чтобы предотвратить ошибки ручной сборки. Применение автоматических диспенсеров или аппликаторов для точной дозировки жидких материалов. - Предупреждение: инженеры-конструкторы должны разработать такой продукт или процесс, чтобы вообще невозможно было совершить ошибку.
Пример: Конструктивные особенности деталей, которые допускают только правильную сборку; уникальные разъемы для избежания неправильного подключения кабелей; симметричные детали, которые позволяют избежать неправильной установки. - Облегчение: Использование определенных методов и группирование шагов облегчают выполнение процесса сборки.
Пример: Визуальные элементы управления, которые включают цветовое кодирование, маркировку деталей. Промежуточный ящик, который визуально контролирует, чтобы все детали были собраны. Нанесение характеристик на детали. - Обнаружение: Ошибки обнаруживаются до того, как они перейдут на следующий производственный процесс, чтобы оператор мог быстро исправить проблему.
Пример: Сенсорные датчики в производственном процессе, которые определяют, что детали собраны неправильно. - Смягчение: Старание уменьшить влияние ошибок.
Пример: Предохранители для предотвращения перегрузки цепей в результате коротких замыканий.
Основные методы poka-yoke
Существует три типа методов защиты от ошибок: контактные методы, считывающие методы и методы последовательного движения.
Контактные методы
Определяют, контактирует ли деталь или продукт физически или энергетически с чувствительным элементом. Примером физического контакта может быть концевой переключатель, который прижимается и подает сигнал, когда его подвижные механизмы касаются изделия. Пример энергетического контакта — фотоэлектрические пучки, которые чувствуют, когда что-то не так в проверяемом объекте.
Лучшие контактные методы — это пассивные устройства, такие как направляющие штыри или блоки, которые не дают неправильно разместить заготовки на конвейере.
Считывающие методы
Следует использовать, когда рабочий процесс делится на фиксированное количество операций, или продукт состоит из фиксированного количества деталей. В соответствии с этим методом устройство считывает количество деталей и передает продукт на следующий процесс только, когда достигнуто нужное значение.
Методы последовательного движения
Определяют, выполнена ли операция в заданный период времени. Также могут использоваться, чтобы проверить, выполняются ли операции в правильной последовательности. В этих методах обычно используют сенсоры или устройства с фотоэлектрическими выключателями, подключенные к таймеру.
Типы чувствительных устройств
Существует три типа чувствительных устройств, применяемых для защиты от ошибок:
- сенсоры физического контакта
- сенсоры энергетического контакта
- сенсоры, которые определяют изменения физических условий.
Сенсоры физического контакта
Этот тип устройств работает по принципу физического касания детали или части оборудования. Обычно такое устройство посылает электронный сигнал в момент контакта. Вот некоторые примеры таких устройств:
- Концевые переключатели — подтверждают наличие и положение объектов, которые касаются маленького рычага на переключателе. Самые распространенные и недорогие устройства.
- Сенсорные переключатели — аналогичны концевым выключателям, но активируются легким прикосновением объекта к тонкой «антенне».
- Триметрон — это чувствительные игольчатые датчики, которые посылают сигналы для звукового оповещения или остановки оборудования, когда измерения объекта выходят за пределы допустимого диапазона.
Энергетические сенсорные датчики
В этих устройствах для выявления ошибки служит не физический, а энергетический контакт. Вот некоторые примеры:
- Бесконтактные переключатели — эти устройства используют лучи света для проверки прозрачных объектов, оценки сварных швов и проверки правильности цвета или размера объекта, прохождения объектов на конвейере, поставки и подачи деталей на конвейер.
- Лучевые датчики — похожи на бесконтактные переключатели, но для обнаружения ошибок используют лучи электронов.
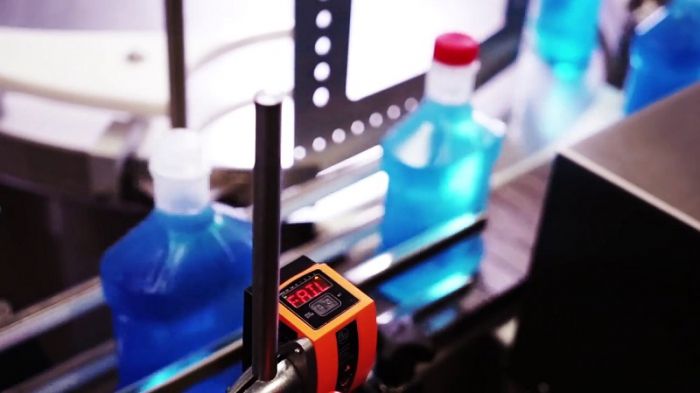
Сенсор проверяет наличие крышек на бутылках. Если крышка отсутствует или плохо закручена, бутылка автоматически убирается с конвейера.
К другим типам энергетических сенсорных устройств относятся:
- Волоконные датчики
- Датчики площади
- Датчики положения
- Датчики габаритов
- Датчики вибрации
- Датчики перемещения
- Датчики для обнаружения проходов металла
- Датчики цветовой маркировки
- Датчики контроля двойной подачи
- Датчики положения объекта сварки
Сенсоры, которые определяют изменения физических условий
Этот тип датчиков определяет изменение условий производства, таких как давление, температура или электрический ток. В пример можно привести датчики давления, термостаты, измерительные реле.
7 ключей к внедрению эффективной системы защиты от ошибок
Чтобы эффективно внедрить метод нулевой ошибки, нужно отталкиваться от следующих рекомендаций:
- Сформируйте команду для внедрения poka-yoke и всегда учитывайте мнение людей, которые непосредственно участвуют в производственном процессе. В этом случае успех вероятнее, чем при привлечении внешних технических экспертов.
- Используйте систематизирование потока ценности, чтобы определить, где нужно повысить стабильность процесса. Это позволит сосредоточиться на областях, которые будут влиять на непрерывный поток.
- Используйте систематизирование процесса внутри выбранной области, чтобы четко определить каждый шаг процесса.
- Применяйте простую методологию решения проблем, например, диаграмму причинно-следственных связей, чтобы определить коренные причины проблем внутри процесса. Так вы выявите те шаги процесса, которые требуют внедрения защиты от ошибок.
- Используйте самую простую работающую технологию poka-yoke. Во многих случаях такие простые устройства как направляющие штифты и концевые выключатели будут отлично справляться. Однако в других случаях понадобятся более сложные системы.
- Отдавайте предпочтение контролирующим, а не предупреждающим системам, поскольку контролирующие системы не зависят от оператора.
- Заведите стандартную форму для каждого устройства poka-yoke со следующими полями:
- проблема
- тревожный сигнал
- действия в случае чрезвычайной ситуации
- способ и частота подтверждения правильности работы
- способ проверки качества в случае поломки.
Poka-yoke устройства вокруг нас
Люди допускают ошибки не только на производстве, но и в процессе использования продуктов. Эти ошибки ведут, как минимум, к поломкам, как максимум, к возникновению серьезной опасности. Поэтому производители встраивают защиту от дурака в конструкцию своих изделий.
Poka-yoke в быту

Например, электрочайник отключится сам, когда вода закипит, благодаря датчику пара. Вы не забудете его выключить. Свисток на обычном чайнике для плиты — тоже что-то вроде poka-yoke приспособления.
Стиральная машина не начнет стирать, пока вы плотно не закроете дверцу, а значит, потопа не будет.
Ребенок не попробует лекарство, которое упаковано в баночку со специальной защитой от детей.
Лифт автоматически откроет двери, если наткнется на препятствие при закрытии.
Современный утюг выключится сам, если вы про него забудете.
Poka-yoke в автомобиле

Современные автомобили просто напичканы устройствами защиты от дурака. Правда, они не такие дешевые, как предполагает концепция poka-yoke, но зато спасают жизни.
К ним относятся активные и пассивные системы безопасности, например:
- система экстренного торможения
- система обнаружения пешеходов
- парковочная система
- система кругового обзора
- система аварийного рулевого управления
- система ночного видения
- система распознавания дорожных знаков
- система контроля усталости водителя.
Poka-yoke в программном обеспечении
Классический пример Poka Yoke — элементы интерфейса, которые запрашивают подтверждение на удаление данных, чтобы пользователь случайно не стер нужную информацию. Чтобы вы случайно не удалили изменения в вордовском файле, система предложит вам его сохранить. Google пошел еще дальше и сам сохраняет изменения после ввода каждого символа.
Примерами защиты от дурака могут быть обязательные поля форм и поля с заданным форматом ввода данных.
Книги по теме
Zero Quality Control: Source Inspection and the Poka-Yoke System / Shigeo Shingo
Книга от создателя системы poka-yoke Сигео Синго, впервые опубликованная в 1986 году. В ней автор обосновывает важность применения устройств защиты от ошибок для достижения безупречного качества продукции. Он называет 112 примеров устройств poka-yoke, работающих в цехах. Внедрение этих устройств обошлось меньше $100.
Poka-Yoke: Improving Product Quality by Preventing Defects / Nikkan Kogyo Shimbun
Первая часть книги в простой иллюстрированной форме рассказывает о концепции poka-yoke и ее особенностях. Во второй части автор приводит множество примеров устройств защиты от ошибок, используемых на японских предприятиях.
Вердикт
Система poka-yoke — очередное гениальное изобретение японцев. За 30 лет устройства poka-yoke эволюционировали вместе с производственным оборудованием. Они перестали быть дешевыми, как гласит один из принципов концепции, но стали гораздо эффективнее.
Сейчас это современные сенсоры, датчики, конструктивные особенности линий, которые обнаруживают дефектные детали и заготовки среди тысяч других и сами удаляют их с конвейера.
Само понятие защиты от ошибок стало шире: специальные устройства, конструктивные особенности и просто предупреждения оберегают нас от ошибок в повседневной жизни.
Благодаря poka-yoke у нас определенно меньше проблем.
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
292 |
аппаратуры.
Опасность возникновения внутренних наводок возросла с внедрением БИС, СБИС особенно средней и большой сложности, вплоть до микропроцессорных наборов. Из-за увеличенной плотности элементов и схем сами ИС и межсоединения становятся источниками помех, которые передаются через возросшие паразитные емкости и индуктивности между проводниками или через проводимость изоляции. В зависимости от того, какой из этих параметров определяет в основном величину тока наводки, различают емкостные наводки, электромагнитные и гальванические. Величину тока электрической помехи Iп , наведенной через емкостную паразитную связь величиной С от источника помехи с амплитудой Uп и частотой fп, можно определить из выражения
Iп=2Uпπ fпС.
Аппаратура считается помехоустойчивой, если при воздействии помех допустимого уровня она продолжает выполнять свои функции без искажения информации (без ошибок).
Основным способом повышения верности передачи дискретных сообщений является введение в передаваемую последовательность избыточности с целью обнаружения и исправления ошибок в принятой информации. Все устройства защиты от ошибок (УЗО) делятся на две группы: симплексные (без обратной связи) и дуплексные (с обратной связью).
В симплексных УЗО повышение верности может быть достигнуто тремя способами:
—путем многократного повторения символов,
—одновременной передачей одной и той же информации по нескольким параллельным каналам,
—применением кодов, исправляющих ошибки.
Многократное повторение является наиболее простым способом повышения верности, который состоит в том, что передатчик посылает в канал нечетное число раз одну и ту же информацию, а на приемной стороне производится сравнение между собой одноименных кодовых комбинаций (либо одноименных двоичных разрядов). Потребителю выдается тот символ (или бит), который был принят большее число раз (мажоритарный метод). Избыточность информации растет пропорционально количеству повторений одних и тех же символов, аналогично возрастают и затраты времени на передачу массива.
Вероятность ошибочного приема символа Ркк, состоящего из nк — разрядной комбинации, при трехкратном повторении и посимвольном сравнении не превышает величины, определяемой по формуле
Ркк≈ 3nк2Ро,
где Ро — вероятность ошибочного приема единичного элемента.
При пятикратном повторении nк — элементной комбинации эта вероятность равна:
Ркк≈ 10nк2Ро3.
При поразрядном сравнении принимаемых символов, состоящих из nк бит, вероятность ошибочной регистрации кодовой комбинации при трехкратном и пятикратном повторении соответственно равна
Ркк≈ 3nкРо2; Ркк≈ 10nкРо3.
Эти формулы справедливы при независимых ошибках в дискретном канале. При пакетировании ошибок (объединении одиночных ошибок в пакеты, в пачки) вероятность поражения соседних символов, а тем более бит, высока, что может привести к значительному снижению помехоустойчивости. Для устранения этого явления производят декорреляцию ошибок, увеличивая интервал между повторяемыми символами (битами), то есть следует повторять не отдельные символы блока, а их группы либо весь блок. Такой алгоритм пере-
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
293 |
дачи приводит к усложнению аппаратуры и увеличению временной задержки между передачей данных от источника и получением их потребителем.
Способ одновременной передачи по нескольким каналам по помехоустойчивости эквивалентен способу многократной передачи. Он предусматривает наличие нечетного количества каналов, по которым передаются одни и те же кодовые последовательности. На приемной стороне используется мажоритарный прием. Основное требование таких систем: наличие параллельных каналов с независимыми ошибками. Для обеспечения этого требования каналы связи должны быть разнесены географически или выбираться в разных линиях связи. Недостатком этого способа является резкое повышение стоимости системы передачи данных (СПД).
Наибольшей эффективностью в симплексных СПД обладает способ защиты от ошибок в передаваемой информации, основанный на использовании кодов с исправлением ошибок, называемых также исправляющими или корректирующими кодами. В таких системах передаваемый блок кроме информационных единичных элементов, полученных от источника информации, содержит и избыточные проверочные биты, формируемые кодирующим устройством на основании информационных разрядов по определенным правилам. На приемной стороне декодирующим устройством по тем же правилам осуществляются аналогичные проверки, при которых учитываются и проверочные элементы. В результате проверки определяется номер позиции в принятом блоке, значение которой необходимо в процессе исправления проинвертировать. Вероятность ошибочного приема символа зависит не только от вероятности ошибки в дискретном канале, но и от применяемого помехоустойчивого кода.
Помехоустойчивыми кодами называются коды с избыточностью, позволяющие обнаруживать и исправлять ошибки, возникающие в результате воздействия помех в принимаемых кодовых последовательностях. Корректирующая способность кода зависит от кодового расстояния d, численно равного минимальному числу элементов, которыми отличается любая кодовая комбинация от другой. В общем случае
d=tо +tи +1,
где tо и tи — число обнаруженных и исправленных ошибок соответственно, причем обязательно tо≥ tи. Если код только обнаруживает ошибки, то d=tо+1, а в случае только исправления d=2tи+1. Количество проверочных элементов r корректирующего кода зависит от вида кода, а число информационных элементов k=n-r, где n-длина двоичной последовательности, кодируемой помехоустойчивым кодом. Отношение r/n называется коэффициентом избыточности кода.
Пример 21.1. Выбрать способ защиты от ошибок, обеспечивающий вероятность побайтной передачи Ркк<1·10-6 при передаче данных по симплексному двухпроводному телефонному каналу связи со скоростью 1200 бит/с при условии, что ошибки на выходе дискретного канала группируются в пакеты длиной не более 12 бит, а минимальный интервал между пакетами составляет 3 с. Вероятность ошибки по элементам на выходе дискретного канала Ро<1·10-4.
Для исправления ошибок кратностью 12 наиболее целесообразно в данном случае применить способ многократной передачи информации. Так как пачка ошибок может поразить 3 байта, то повторять следует не менее трех знаков. При трехкратном повторении и поэлементном сравнении вероятность ошибки регистрации знака равна:
Ркк≈ 3nкРо2≈ 3·8(1·10-4)2=0,24·10-6<1·10-6.
Максимальная задержка выдачи информации потребителю при трехкратном повторении составит tз=24τ о=24·0,83≈ 20 мс, что вполне приемлемо для технических нужд.
21.3.Обнаруживающие коды — с проверкой на четность и итеративный код
Одним из простых кодов, позволяющих обнаруживать одиночные ошибки, является код с проверкой на четность. Он образуется путем добавления к передаваемой комбинации, состоящей из k информационных символов неизбыточного кода, одного контрольного бита
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
294 |
так, чтобы общее количество единиц в передаваемой комбинации было четным. В итоге общее количество элементов в передаваемой комбинации n=k+1. На приемной стороне производят проверку на четность. При четном числе единиц предполагается, что ошибок нет, и потребителю выдается k бит, а контрольный элемент отбрасывается. Аналогично строится код с проверкой на нечетность.
Кодирующие и декодирующие устройства кодов с защитой на четность — самые простые. Формирование контрольного бита осуществляется сумматором по модулю 2 (Т-триг- гером). Передаваемая в канал двоичная комбинация одновременно подается на вход Т-триг- гера. На соответствующей временной позиции импульсом с распределителя производится опрос сумматора, и при единичном состоянии последнего в канал подается “1” (дополняющая переданную последовательность до четного числа), а при нулевом — “0”. Аналогичная процедура производится на приемной стороне. Нулевое состояние Т-триггера в конце приема блока свидетельствует об отсутствии одиночных ошибок.
Минимальное кодовое расстояние кода d=2, поэтому код позволяет обнаруживать все одиночные ошибки, а кроме того, все случаи нечетного числа ошибок (3, 5, и т.д.).
Вероятность необнаружения ошибок для кода с проверкой на четность зависит от длины
блока n и вероятности ошибочного приема единичного элемента Р0:
Ркк≈ Сn2Ро2(1-Ро)n-2, Cnl=n!/[l!(n-l)1],
где Сnl — число сочетаний из n по l.
Как показывают расчеты по этим формулам, для обеспечения вероятности ошибки по символам менее 1·10-6 допустимая длина кодовой комбинации составляет несколько байт.
Итеративный код характеризуется наличием двух или более систем проверок внутри каждой кодовой комбинации, согласно ГОСТ 20687-75 он строится следующим образом. К семиэлементному коду КОИ-7 добавляют проверочный бит, который располагается в 8-й позиции. Элементы передаваемого блока и проверочные биты образуют матрицу:
|
а11 |
а12 |
а13 |
. . . а1n |
r1 |
|
|
а21 |
а22 |
а23 |
. . . |
а2n |
r2 |
|
. . . . . . . . . . . . . |
|||||
|
a71 |
a72 |
a73 |
. . . |
a7n |
r7 |
|
q1 |
q2 |
q3 |
. . . qn |
q(n+1), |
где аij (i=1, 2, . . .,7; j=1, 2, . . . , n) — информационные биты; q1, q2, q3, . . . , qn — проверочные биты знаков, образующие первую совокупность проверок. В конце матрицы стоят биты проверки на четность ri (i=1, 2, . . . , 7) которые являются суммой по модулю 2 всех элементов строки; r1 — r7 включается в знак проверки — это вторая совокупность проверок. К семи элементам знака добавляется восьмой проверочный бит q(n+1). Проверочные биты q1, q2, .
. ., q(n+1) формируются таким образом, чтобы число единиц в столбце было четным для асинхронных систем и нечетным — для синхронных. Каждый знак нужно передавать последовательно, начиная с первого бита aij и кончая восьмым проверочным.
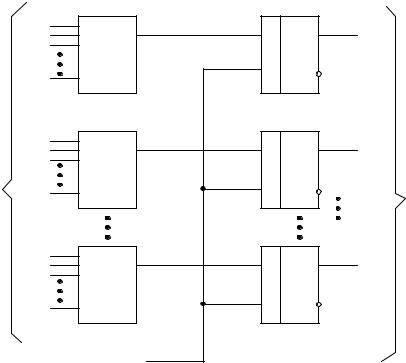
Кодирующее устройство итеративного кода (рис. 21.5) содержит параллельный 8-раз- рядный сумматор по модулю 2 (D1), в котором формируется проверочный элемент столбца qj. Проверочный бит вместе с поступающей информационной кодовой комбинацией заносится в параллельно-последовательный регистр D3. Синхронизация записи осуществляется подачей управляющего импульса на вход С2. Сформированный байт подается на вход параллельно-последовательного сумматора по модулю 2 (D4), в котором осуществляется построчное суммирование передаваемых кодовых комбинаций. Операция суммирования в D4 синхронизируется импульсом, подаваемым на вход С в конце каждого восьмого такта. Поэлементная выдача байта данных в дискретный канал производится под действием сдвигающих тактовых импульсов, подаваемых на вход С1 и D3. Момент времени подачи ТИ и их количество определяются управляющим потенциалом, поступающим от устройства уп-
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
295 |
равления на вход схемы совпадения D2. В конце информационного блока контрольная сумма r1, r2, . . . , r7, q(n+1) переписывается в регистр сдвига D6 при наличии управляющего потенциала с УУ на втором входе D5 и выдается в последовательной форме на вход устройства преобразования сигналов (УПС).
В состав декодирующего устройства также входят сумматоры по модулю 2, осуществляющие проверку на четность поступающих байтов по столбцам и по строкам. Так как ошибка может быть обнаружена в любом столбце, то ее необходимо фиксировать в момент появления. Несоблюдение признака четности по строкам обнаруживается только по окончании блока.
Начальный знак блока НТ (начало текста) и символ СИН (синхронизация) не включают в суммирование. В блок включается комбинация КБ (конец блока), указывающая, что далее следует знак проверки матрицы.
|
a1 |
D3 |
D4 |
D6 |
||||
|
D 0 |
RG Q 0 |
T M2 Q 0 |
D 0 |
RG |
|||
|
a2 1 |
|||||||
|
2 |
D 1 |
Q1 |
T |
||||
|
a7 |
D 8 |
||||||
|
7 |
Q6 |
T |
Q6 |
D 6 |
|||
|
D 7 |
|||||||
|
C2 |
Q7 |
T |
Q7 |
D 7 |
|||
|
C1 |
Q8 |
C |
C |
Q7 |
|||
|
D1 |
|||||||
|
M2 |
D5 |
||||||
|
q |
ТИ |
& |
На УПС |
||||
|
& |
|||||||
|
ТИ |
D7 |
||||||
|
& |
|||||||
D2
От УУ УЗО
Рис. 21.5. Кодирующее устройство итеративного кода
Кодовое расстояние итеративного кода d=4, он обнаруживает все ошибки кратности до трех и нечетной кратности, а также любой пакет ошибок длиной l+1, где l — длина строки матрицы кода. Недостатком итеративного кода, использующего проверку на четность по столбцам и строкам, является его высокая избыточность (≈ 15%). Однако кодирование и декодирование таких кодов очень просто реализуется программными методами, поэтому итеративные коды используются в аппаратуре передачи данных (АПД) с микропроцессорными УЗО. При более жестких требованиях по достоверности передачи данных применяют итеративный код с тремя проверками.
21.4. Корректирующий код Хэмминга
Код Хэмминга — один из наиболее эффективных кодов, позволяющих исправлять любую одиночную ошибку. Кодовое расстояние d=3. Код образуется путем дополнения информационной части передаваемого блока, состоящей из k бит, r проверочными элементами, причем в информационную часть при кодировании можно включать и служебные символы (номер, начало и конец блока), за исключением маркерных комбинаций, которые целесообразно располагать в начале блока. При выборе длины передаваемого блока n и количества проверочных элементов r следует руководствоваться неравенством 2r≥ n+1. Учитывая, что r=n-k, неравенство запишется в виде
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
296 |
2k<=2n/(n+1),
где n и k — целые числа. Неравенство является исходным для определения длины кодовой комбинации по заданному числу k. Из этих неравенств следует, например, что пять контрольных разрядов позволяют передавать в коде Хэмминга от 11 до 26 информационных разрядов и т.д.
Первый проверочный элемент П1 кода Хэмминга (КХ) образуется суммированием по модулю 2 всех нечетных бит блока, начиная с первого:
П1=а1+а3+а5+а7+ . . . .
Результат проверки П2 определяет второй разряд проверочной комбинации, называемой также синдромом ошибки. Он вычисляется суммированием тех бит блока, номера которых соответствуют n-разрядным двоичным числам, имеющим единицу во втором разряде, то есть
П2=а2+а3+а6+а7+а10+а11+ . . . .
Третья проверка П3 охватывает разряды, номера которых соответствуют n-разрядным числам, имеющим единицу в третьем разряде. Аналогично находятся разряды, охватываемые четвертой, пятой и т.д. проверками:
П3=а4+а5+а6+а7+а12+а13+а14+а15+ . . . ,
П4=а8+а9+а10+а11+а12+а13+а14+а15+ . . . ,
П5=а16+а17+а18+а19+а20+ . . . .
В таблице 21.2 показан пример построения КХ для семиразрядного слова.
Место расположения проверочных элементов не имеет значения, их можно размещать перед, после и чередуя с информационными символами. Если их расположить на местах, кратных степени 2, то есть на позициях 1, 2, 4, 8 и так далее, то код двоичного числа, образованного проверочными элементами, на приемной стороне будет указывать номер разряда, в котором произошла ошибка.
Таблица 21.2. Построение кода Хэмминга
_________________________________________________
Номер разрядов кодового слова Проверочные разряды
_________________________________________________
Десятичный Двоичный 1 2 3
_________________________________________________
|
1 |
0001 |
* |
||
|
2 |
0010 |
* |
||
|
3 |
0011 |
* |
* |
|
|
4 |
0100 |
* |
||
|
5 |
0101 |
* |
* |
|
|
6 |
0110 |
* |
* |
|
|
7 |
0111 |
* |
* |
* |
__________________________________________________
Контроль по КХ реализуется с помощью набора схем проверки на четность, которые при кодировании определяют контрольные разряды, а при декодировании формируют корректирующее число.
Поскольку основной операцией в кодирующих и декодирующих устройствах КХ является суммирование по модулю 2, то их схемы отличаются от схем кодеров итеративного кода образованием проверочных элементов. Для упрощения технической реализации (исключение многоразрядных параллельных сумматоров, входного накопительного регистра) вначале посылают в канал информационные биты, а затем проверочные. При таком способе формирование контрольных элементов можно осуществлять с помощью одноразрядных
|
Глава 21. Устройства защиты от ошибок в передаваемой информации |
297 |
последовательных сумматоров по модулю 2 одновременно с передачей информационных разрядов. Чтобы сохранить корректирующие свойства КХ, необходимо произвести перестановку разрядов в проверочных равенствах с учетом изменения номеров суммируемых элементов за счет вынесения в конец блока проверочных битов. При такой перестановке уравнения проверки будут охватывать следующие разряды:
П1 : 1, 2, 4, 5, 7, 9, 11, 12, 14, . . . ; П2 : 1, 3, 4, 6, 7, 10, 11, 13, 14, . . . ; П3 : 2, 3, 4, 8, 9, 10, 11, . . . ; П4 : 5, 6, 7, 8, 9, 10, 11, . . . .
Бит первой проверки будет располагаться на (k+1)-й позиции блока, второй — на (k+2)- й, последний — на n-й позиции. На рис. 21.6 приведена схема одного из вариантов формирования проверочных битов КХ, которая может быть использована как в кодере, так и в декодере. Информационные элементы, поступающие от источника, подаются на счетные входы Т-триггеров (сумматоров по модулю 2) и через УПС — в канал связи. Количество триггеров равно числу контрольных элементов r . Синхронизация суммирования осуществляется импульсами с распределителя, которые объединяются схемами ИЛИ. Входы первого элемента ИЛИ соединяются с выходами распределителя в соответствии с первой проверкой П1, второй — проверкой П2 и так далее. Таким образом обеспечивается суммирование на Т- триггерах тех битов, номера которых определяются соответствующими проверками. После прихода последнего k-го информационного элемента в сумматорах будет зафиксировано r проверочных элементов. В кодирующем устройстве эти биты преобразовываются в последовательную форму и через УПС поступают в канал связи. На приемной стороне вместе с информационными суммированию подвергаются и проверочные элементы. Полученная r- разрядная кодовая комбинация (синдром ошибки) подается на дешифратор, определяющий номер разряда, в котором произошла ошибка. Данный дешифратор отличается от классического дешифратора КХ и должен учитывать перестановки контрольных элементов, произведенные при кодировании.
От распределителя
|
1 |
1 |
С |
Т |
Q1 |
|
2 |
||||
|
4 |
||||
|
Т |
||||
|
1 |
1 |
С |
Т |
Q2 |
|
3 |
||||
|
4 |
||||
|
Т |
Проверочные |
|||
|
биты |
||||
|
1 |
С |
Т |
Qr |
|
|
Т |
||||
|
Вход |
Рис. 21.6. Схема формирования проверочных элементов кода Хэмминга
Соседние файлы в предмете Организация ЭВМ
- #
- #
- #
02.05.2014632.83 Кб41Моделирование последовательного многоразрядного сумматора.doc
- #
- #
- #
- #
- #
- #
Устройство защиты сигнала данных от ошибок
- Устройство защиты сигнала данных от ошибок
- 1. Устройство для уменьшения числа ошибок в сигнале данных
Употребляется в документе:
ГОСТ 17657-79
Передача данных. Термины и определения
Телекоммуникационный словарь.
2013.
Смотреть что такое «Устройство защиты сигнала данных от ошибок» в других словарях:
-
устройство защиты сигнала данных от ошибок — устройство защиты от ошибок Устройство для уменьшения числа ошибок в сигнале данных. Примечание Устройству защиты сигнала данных от ошибок присваивается название в зависимости от вида канала, в котором производится защита от ошибок, например,… … Справочник технического переводчика
-
Устройство защиты сигнала данных от ошибок — 125. Устройство защиты сигнала данных от ошибок Устройство защиты от ошибок Е. Error control equipment Устройство для уменьшения числа ошибок в сигнале данных. Примечание. Устройству защиты сигнала данных от ошибок присваивается название в… … Словарь-справочник терминов нормативно-технической документации
-
аналоговое устройство защиты сигнала данных от ошибок — аналоговое УЗО Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных. [ГОСТ 17657 79 ] Тематики передача данных Обобщающие термины основные устройства и аппаратура передачи данных Синонимы аналоговое… … Справочник технического переводчика
-
цифровое устройство защиты сигнала данных от ошибок — цифровое УЗО Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных. [ГОСТ 17657 79 ] Тематики передача данных Обобщающие термины основные устройства и аппаратура передачи данных Синонимы цифровое УЗО EN … Справочник технического переводчика
-
Аналоговое устройство защиты сигнала данных от ошибок — 126. Аналоговое устройство защиты сигнала данных от ошибок Аналоговое УЗО Е. Error control analog equipment Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных Источник: ГОСТ 17657 79: Передача… … Словарь-справочник терминов нормативно-технической документации
-
Цифровое устройство защиты сигнала данных от ошибок — 127. Цифровое устройство защиты сигнала данных от ошибок Цифровое УЗО Е. Error control digital equipment Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных Источник: ГОСТ 17657 79: Передача данных.… … Словарь-справочник терминов нормативно-технической документации
-
Аналоговое устройство защиты сигнала данных от ошибок — 1. Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных Употребляется в документе: ГОСТ 17657 79 Передача данных. Термины и определения … Телекоммуникационный словарь
-
Цифровое устройство защиты сигнала данных от ошибок — 1. Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных Употребляется в документе: ГОСТ 17657 79 Передача данных. Термины и определения … Телекоммуникационный словарь
-
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
-
ГОСТ 17657-79: Передача данных. Термины и определения — Терминология ГОСТ 17657 79: Передача данных. Термины и определения оригинал документа: 78. n кратная ошибка в цифровом сигнале данных n кратная ошибка Е. n fold error Группа из и ошибок в цифровом сигнале данных, при которой ошибочные единичные… … Словарь-справочник терминов нормативно-технической документации
8.1 Краткая характеристика и выбор способов защиты
Основным
способом повышения верности передачи
дискретных сообщений является введение
в передаваемую последовательность
избыточности с
целью обнаружения и исправления ошибок
в принятой информации. Все устройства
защиты от ошибок (УЗО) делятся на две
группы: симплексные (без обратной связи)
и дуплексные (с обратной связью).
В симплексных
(односторонних) УЗО повышение верности
может быть достигнуто тремя способами:
путем многократного повторения символов;
одновременной передачей одной и той же
информации по нескольким параллельным
каналам; применением кодов, исправляющих
ошибки.
Многократное
повторение является наиболее простым
способом повышения верности, который
состоит в том, что передатчик посылает
в канал нечетное число раз одну и ту же
информацию, а на приемной стороне
происходит сравнение между собой
одноименных кодовых комбинаций (либо
одноименных двоичных разрядов).
Потребителю выдается тот символ (или
бит), который был принят большее число
раз (мажоритарный
метод). Однако при
выборе такого способа защиты следует
иметь в виду, что избыточность
информации растет пропорционально
количеству повторений одних и тех
же символов, аналогично возрастают
и затраты времени на передачу массива.
Вероятность
ошибочного приема символа Ркк,
состоящего из nк-разрядной
комбинации, при трехкратном повторении
и посимвольном сравнении не превышает
величины, определяемой по формуле
Ркк
3 n2к
Р0
, (1.41)
где
Р0
— вероятность ошибочного приема
единичного элемента. При пятикратном
повторении nк-элементной
комбинации эта вероятность равна
Ркк
10n2к
Р30
, (1.42)
При
поразрядном сравнении принимаемых
символов, состоящих из nк
бит, вероятность
ошибочной регистрации кодовой комбинации
при трехкратном и пятикратном повторении
соответственно равна
Ркк
3nк
Р20
, (1.43)
Ркк
10nк
Р30
, (1.44)
Формулы
(1.43) и (1.44) справедливы при независимых
ошибках в дискретном канале. При
пакетировании ошибок вероятность
поражения соседних символов, а тем более
бит высока, что может привести к
значительному снижению помехоустойчивости.
Для устранения этого явления следует
произвести декорреляцию ошибок,
увеличивая интервал между повторяемыми
символами (битами), т. е. следует повторять
не отдельные символы блока, а их
группы либо весь блок. Такой алгоритм
передачи приводит к усложнению аппаратуры
и увеличению временной задержки между
передачей данных от источника и получением
их потребителем, что не всегда можно
допустить в реальных системах обмена
информацией.
Способ одновременной
передачи по нескольким каналам по
помехоустойчивости эквивалентен способу
многократной передачи. Он предусматривает
наличие нечетного количества каналов,
по которым передаются одни и те же
кодовые последовательности. На приеме
используется мажоритарный прием.
Основное требование таких систем:
наличие параллельных каналов с
независимыми ошибками. Для обеспечения
этого требования каналы связи должны
быть разнесены географически или хотя
бы по крайней мере выбираться в разных
линиях связи. Недостатком способа
одновременной передачи является резкое
повышение стоимости СПД за счет
использования для передачи сообщений
от одного источника нескольких каналов.
Наибольшей
эффективностью в симплексных СПД
обладает способ защиты от ошибок,
основанный на использовании кодов
с исправлением ошибок. В
таких системах передаваемый блок кроме
информационных единичных элементов,
полученных от источника информации,
содержит и проверочные биты, которые
формируются кодирующим устройством на
основании информационных разрядов
по определенным правилам. На приемной
стороне декодером по тем же правилам
осуществляются аналогичные проверки,
при которых учитываются и проверочные
элементы. В результате проверки
определяется номер позиции в принятом
блоке, значение которой необходимо в
процессе исправления проинвертировать.
Вероятность ошибочного приема символа
зависит не только от вероятности ошибки
в дискретном канале, но и от применяемого
кода.
В односторонних
СПД при выборе корректирующего кода
для УЗО приходится рассчитывать на
худшее состояние канала, т. е. избыточность
в таких системах является постоянной,
независимо от того, имеются ошибки
в канале или нет. В начальных условиях
худшее состояние канала будет относительно
редко, его пропускная способность
используется очень неэффективно. Вторым
недостатком систем с исправлением
ошибок является резкое возрастание
сложности аппаратуры с увеличением
количества исправляемых ошибок.
Существенное снижение аппаратурных
затрат может быть получено за счет
применения в качестве кодирующих и
декодирующих устройств микропроцессоров.
К
дуплексной группе УЗО относятся
устройства, в которых повышение верности
передаваемой информации достигается
за счет введения обратной
связи. Они в свою
очередь делятся на системы с решающей
(РОС), информационной (ИОС) и комбинированной
(КОС) обратной связью. Сущность повышения
верности в этих системах состоит в
том, что при обнаружении искажений
в передаваемом сообщении происходит
запрос блока, в котором один или несколько
неправильно принятых знака. В системах
с РОС передаваемые данные кодируются
избыточными кодами, позволяющими
обнаруживать одиночные ошибки или пачки
(группы) ошибок. Решение о необходимости
повторения блока информации, в котором
обнаружена ошибка, принимается
приемником на основании анализа
поступившей последовательности. В
случае обнаружения в принятом блоке
ошибок он стирается и по каналу обратной
связи (ОС) приемная станция посылает
сигнал «Запрос», на основании которого
передатчик повторно выдает этот же
блок. При безошибочном приеме блока
данные поступают потребителю, а по
каналу ОС передается сигнал
«Подтверждение».
В УЗО с ИОС нет
необходимости вводить избыточность в
передаваемые данные. Двоичная
последовательность, зафиксированная
приемником, запоминается и затем по
каналу ОС передается вся или в виде
укороченной кодовой комбинации,
содержащей определенные признаки
всей последовательности, на передающую
сторону. Полученная по каналу ОС
информация анализируется передающей
станцией, которая по результатам анализа
принимает решение о передаче следующего
блока либо о повторении ошибочно
принятого. Это решение сообщается на
приемную сторону и на его основании
полученная информация выдается
потребителю или стирается.
УЗО с КОС представляют
собой сочетание информационной и
решающей ОС. В них решение о необходимости
повторной передачи может приниматься
как на передающей, так и на приемной
сторонах, а по каналу обратной связи
могут передаваться информационные
элементы или сигналы «Запрос» и
«Подтверждение».
В
процессе проектирования УЗО должны
быть заданы следующие параметры.
Вероятность ошибочной регистрации
знака Ркк.
Скорость передачи
дискретной информации V.
Допустимое время»
задержки выдачи сообщения потребителю
t3.
Время готовности
к передаче (время фазирования по циклу)
tф.
Вероятность ложного
запуска приемного устройства Рлф.
Вероятность
ошибочной регистрации единичного
элемента Р0
и характер
группирования ошибок. Тип канала связи
(симплексный или дуплексный).
Кроме этих данных
могут быть введены ограничения на
параметры, определяющие эксплуатационные
показатели УЗО, в частности на применяемую
элементную базу, потребляемую мощность,
габаритные размеры, надежность и т. д.
Одной из главных
задач проектирования УЗО является
выбор способа защиты от ошибок,
который при минимальных затратах
обеспечит выполнение поставленных
требований. Под затратами подразумевается
не только стоимость аппаратуры, но и
необходимые полоса частот (требуемое
число каналов связи), время на передачу
сообщения, а также стоимость обслуживания
устройства в процессе эксплуатации.
При наличии
симплексных каналов связи повышение
верности может быть достигнуто только
за счет применения кодов с исправлением
ошибок либо многократного повторения.
Одновременная передача одной и той
же информации по нескольким каналам
применяется весьма редко. Если ошибки
в дискретном канале независимы, т. е.
вероятность группирования их в пачки
мала, то необходимая помехоустойчивость
сравнительно легко может быть достигнута
при использовании кодов, исправляющих
одиночные ошибки, например кода Хемминга.
При группировании ошибок в пачки
небольшой кратности их исправление
может быть обеспечено за счет применения
кодов Файра. С увеличением длины
пачки (пять и более ошибок) кодирующие
и декодирующие устройства получаются
очень громоздкими, а для их декодирования
с помощью микропроцессора требуется
значительное время. В этом случае
целесообразно использовать многократное
повторение блока информации. Причем
длина блока должна быть не менее
длительности пачки ошибок. Многократное
повторение блоков приводит к увеличению
задержки выдачи сообщения потребителю.
Поэтому необходимо следить за тем, чтобы
время задержки не превысило допустимой
величины.
При наличии
дуплексных каналов связи в большинстве
случаев целесообразно использовать
УЗО с ОС. Устройства с информационной
ОС позволяют обнаруживать ошибки
практически любой кратности, но к
каналу обратной связи предъявляются
такие же требования, как и к прямому.
Поэтому УЗО с ИОС наиболее эффективно
могут быть использованы при скорости
передачи 300/200 бит/с, так как УПС для такой
скорости образуют в полосе канала
ТЧ два идентичных двунаправленных
дискретных канала. Если передача
данных должна осуществляться на скорости
600 бит/с или выше, то эффективность
использования канала связи УЗО с ИОС
снижается и в этом случае для повышения
помехоустойчивости передачи символов
следует применять УЗО с РОС.
При снижении
качества канала связи в системах с ОС
время задержки сообщения резко
увеличивается, а в худшем случае выдача
информации потребителю может вообще
прекратиться. Чтобы не допустить этого,
на каналах низкого качества целесообразно
совмещать методы повышения верности
передачи информации. Например, при
хорошем состоянии канала УЗО
работает с ОС, а
при его ухудшении переходит в режим
односторонней передачи с исправлением
ошибок.
Пример
8.1. Выбрать способ
защиты от ошибок, обеспечивающий
верность передачи по байтам Ркк
110-6
при передаче данных по симплексному
двухпроводному телефонному каналу
связи со скоростью 1200 бит/с при условии,
что ошибки на выходе дискретного канала
группируются в пачки длиной не более
12 бит, а минимальный интервал между
пачками составляет 3 с. Вероятность
ошибки по элементам на выходе дискретного
канала Р0
110-4.
Для
исправления ошибок кратностью 12 наиболее
целесообразно в данном случае
применить способ многократной передачи
информации. Так как пачка ошибок может
поразить 3 байта, то повторять следует
не менее трех знаков. При трехкратном
повторении и поэлементном сравнении
вероятность ошибки регистрации знака
равна (1.4.3):
Ркк
3nк
Р20
38
(110-4)2
= 0,2410-6
< 110-6.
Максимальная
задержка выдачи информации потребителю
при трехкратном повторении составит
t3
=240
= 240,83
20 мс, что вполне приемлемо для
практических нужд.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Рабочая инструкция
Системы защиты от ошибок (Poka Yoke)
1.ЦЕЛЬ
Установить порядок разработки и использования систем защиты от ошибок при выпуске продукции.
2.ТЕРМИНЫ, ОПРЕДЕЛЕНИЯ И СОКРАЩЕНИЯ
- Poka-Yoke (яп., произносится «пока-ёкэ»; рус. — защита от ошибок) — один из элементов системы бережливого производства, позволяющий операторам при работе избежать ошибок в результате невнимательности. (установка неправильной детали, пропуск детали, установка детали другой стороной и т.д.).
- НД — нормативный документ.
- ОГТ — отдел главного технолога.
- ООО — отдел обслуживания оборудования.
- ДР — дирекция по развитию.
Ответственность за включение систем защиты от ошибок в техпроцесс сборки изделий несут сотрудники ДР. За функционирование и проверку их работоспособности — ООО. В случае возникновения необходимости применения дополнительных систем защиты от ошибок в ходе массового производства, ответственность за их разработку и внедрение несут сотрудники ОГТ.
3.ОПИСАНИЕ
Системы защиты от ошибок разделяют на:
- сигнализирующие (без остановки производства) — обнаруживающие ошибку и предупреждающие о ней, не разрешая осуществлять передачу дефектного изделия на следующую стадию производства;
- блокирующие (с остановкой производства) — не позволяющие совершить ошибку.
Наличие системы, благодаря которой операцию можно выполнить только одним единственным, правильным способом, в результате чего неправильная сборка исключается, и дефект просто не может возникнуть, — это идеальный пример проведения предупреждающих действий.
Исторически первый случай осознанного применения систем Poka Yoke — это изобретение ткацкого станка, который останавливался при обрыве нити, и таким образом не был способен производить дефектную ткань.
Другие примеры защиты от ошибок:
- При конструировании детали придание ей такой формы, которая позволяет установить ее только в правильном положении. Вариант, — уникальное размещение реперных знаков на разных печатных платах одинаковых габаритов для автоматического их распознавания в станках.
- Установка над контейнерами с деталями фотоэлементов, настроенных таким образом, что если оператор, доставая деталь, не пересек рукой световой луч, то изделие не будет передано на следующую стадию.
- Применение для комплектующих специальных ящиков с ячейками, форма которых совпадает с формой комплектующих. Что позволяет обеспечивать применение правильных деталей при сборке.
- Остановка станков при сбоях с включением звукового и/или светового сигнала для привлечения внимания оператора.
- Печать идентификационных этикеток только при получении положительного результата тестирования.
- Приведение в действие пресса одновременным нажатием двух кнопок, разнесенных друг от друга на расстояние, не позволяющее нажать их одной рукой (предотвращается попадание рук оператора под прессу
Рисунок 1 — пример устройства контактного типа для защиты от ошибок.
Системы защиты от ошибок следует устанавливать в тех местах техпроцесса, в которых невнимательность оператора может повлиять на значение ключевых характеристик процесса или собираемого продукта.
Места установки и использования выявляются при проведении FMEA — анализа причин и последствий потенциальных отказов, который проводится при проектировании любого нового технологического процесса или при его модернизации.
Проанализировав существующие процессы и оборудование с целью определить те их элементы, которые имеют решающее значение для критических характеристик. Также можно определить необходимость и места использования инструментов Poka-Yoke.
Для наиболее эффективного применения систем защиты от ошибок следует вовлекать операторов, выполняющих изучаемые операции. В рабочие группы по проведению FMEA, а также по выявлению и устранению ошибок и дефектов и реализации идеи встроенного качества (не бери — не делай – не передавай).
Работа начинается с выявления характера реальных или предполагаемых дефектов. Затем определяются их причины (с помощью метода «5 почему») и выявляются параметры, изменяемые одновременно с действием этой причины. После аналитической стадии переходят к стадии творческой, придумывая, как исключить саму возможность появления дефекта. Или хотя бы предупредить о возможном его появлении. В результате появляется идея системы Poka-Yoke.
Места установки систем защиты от ошибок помечаются в карте потока процесса специальным значком «PY»
B планах управления следует предусматривать регулярную проверку работоспособности установленных систем защиты от ошибок (обязательно — при каждом запуске процесса сборки изделий).
5.ССЫЛКИ
- СТП «Технологическая подготовка производства и управление технологической документацией»
- СТП «План управления»
- СТП «Порядок подачи, оценки и реализации кайдзен-предложений»
- CTП «FMEA»
- РИ «Определение ключевых характеристик продуктов и процессов»
- Ф «Карта потока процесса»
- Ф «5 почему»
Устройство защиты сигнала данных от ошибок
- Устройство защиты сигнала данных от ошибок
- 1. Устройство для уменьшения числа ошибок в сигнале данных
Употребляется в документе:
ГОСТ 17657-79
Передача данных. Термины и определения
Телекоммуникационный словарь.
2013.
Смотреть что такое «Устройство защиты сигнала данных от ошибок» в других словарях:
-
устройство защиты сигнала данных от ошибок — устройство защиты от ошибок Устройство для уменьшения числа ошибок в сигнале данных. Примечание Устройству защиты сигнала данных от ошибок присваивается название в зависимости от вида канала, в котором производится защита от ошибок, например,… … Справочник технического переводчика
-
Устройство защиты сигнала данных от ошибок — 125. Устройство защиты сигнала данных от ошибок Устройство защиты от ошибок Е. Error control equipment Устройство для уменьшения числа ошибок в сигнале данных. Примечание. Устройству защиты сигнала данных от ошибок присваивается название в… … Словарь-справочник терминов нормативно-технической документации
-
аналоговое устройство защиты сигнала данных от ошибок — аналоговое УЗО Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных. [ГОСТ 17657 79 ] Тематики передача данных Обобщающие термины основные устройства и аппаратура передачи данных Синонимы аналоговое… … Справочник технического переводчика
-
цифровое устройство защиты сигнала данных от ошибок — цифровое УЗО Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных. [ГОСТ 17657 79 ] Тематики передача данных Обобщающие термины основные устройства и аппаратура передачи данных Синонимы цифровое УЗО EN … Справочник технического переводчика
-
Аналоговое устройство защиты сигнала данных от ошибок — 126. Аналоговое устройство защиты сигнала данных от ошибок Аналоговое УЗО Е. Error control analog equipment Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных Источник: ГОСТ 17657 79: Передача… … Словарь-справочник терминов нормативно-технической документации
-
Цифровое устройство защиты сигнала данных от ошибок — 127. Цифровое устройство защиты сигнала данных от ошибок Цифровое УЗО Е. Error control digital equipment Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных Источник: ГОСТ 17657 79: Передача данных.… … Словарь-справочник терминов нормативно-технической документации
-
Аналоговое устройство защиты сигнала данных от ошибок — 1. Устройство защиты сигнала данных от ошибок, предназначенное для работы с аналоговым сигналом данных Употребляется в документе: ГОСТ 17657 79 Передача данных. Термины и определения … Телекоммуникационный словарь
-
Цифровое устройство защиты сигнала данных от ошибок — 1. Устройство защиты сигнала данных от ошибок, предназначенное для работы с цифровым сигналом данных Употребляется в документе: ГОСТ 17657 79 Передача данных. Термины и определения … Телекоммуникационный словарь
-
устройство — 2.5 устройство: Элемент или блок элементов, который выполняет одну или более функцию. Источник: ГОСТ Р 52388 2005: Мототранспортны … Словарь-справочник терминов нормативно-технической документации
-
ГОСТ 17657-79: Передача данных. Термины и определения — Терминология ГОСТ 17657 79: Передача данных. Термины и определения оригинал документа: 78. n кратная ошибка в цифровом сигнале данных n кратная ошибка Е. n fold error Группа из и ошибок в цифровом сигнале данных, при которой ошибочные единичные… … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р 51028-97
Группа Э50
ОКС 33.040.40*
ОКСТУ 6656
_____________________
* В Указателе «Национальные стандарты» 2004 год указан ОКС 33.040.20. — Примечание.
1 РАЗРАБОТАН Научно-производственным кооперативом «Интердата»
ВНЕСЕН Всероссийским научно-исследовательским институтом «Эталон»
2 ПРИНЯТ И ВВЕДЕН В ДЕЙСТВИЕ Постановлением Госстандарта России от 6 февраля 1997 г. N 40
3 Стандарт соответствует требованиям рекомендации Международного Союза Электросвязи (Синяя книга, Мельбурн 1988): V.42
1 ОБЛАСТЬ ПРИМЕНЕНИЯ
Настоящий стандарт распространяется на устройства защиты от ошибок (УЗО) аппаратуры передачи данных (АПД), работающих в двухточечных и последовательно соединенных каналах передачи данных, обеспечивающих одновременный двусторонний обмен данными, сопрягающихся с оконечным оборудованием данных (ООД) и устройством преобразования сигналов (УПС).
Стандарт устанавливает процедуры передачи информации и защиты от ошибок для использования в дуплексных АПД.
Факторы, влияющие на определение значения выдержки таймера подтверждения Т401, приведены в приложении А; цепи стыка С2, используемые в процедуре, приведены в приложении Б.
2 НОРМАТИВНЫЕ ССЫЛКИ
В настоящем стандарте использованы ссылки на следующие стандарты:
ГОСТ 17657-79 Передача данных. Термины и определения
ГОСТ 18145-81 Цепи на стыке С2 аппаратуры передачи данных с оконечным оборудованием при последовательном вводе-выводе данных. Номенклатура и технические требования
ГОСТ 25007-81 Стык аппаратуры передачи данных с каналами связи систем передачи с частотным разделением каналов. Основные параметры сопряжения
ГОСТ 26113-84 Процедуры управления звеном передачи данных. Элементы балансных процедур при одновременной двусторонней передаче информации и защиты от ошибок
ИСО 8885-93 Передача данных. Процедуры управления звеном данных верхнего уровня. Содержимое и формат поля информации кадра XID общего назначения.
3 ОПРЕДЕЛЕНИЯ
В настоящем стандарте применяют термины по ГОСТ 17657, а также следующие термины:
Станция передачи данных — совокупность оконечного оборудования и аппаратуры передачи данных.
Команда — предписание, относящееся к управлению процедурой исправления ошибок, содержащееся в поле управления кадра.
Ответ — сообщение о выполнении команды, содержащееся в поле управления кадра
Фаза процедур управления (фаза) — часть процедуры управления процессом исправления ошибок.
Совокупность всех фаз определяет полностью процедуру управления процессом исправления ошибок.
Состояние фазы процедуры управления (состояние) — часть процедур, входящая в фазу и выполняющая законченную функцию внутри фазы.
4 ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
УЗО — устройство защиты от ошибок
АПД — аппаратура передачи данных
ООД — оконечное оборудование данных
УПС — устройство преобразования сигнала
Т401 — таймер подтверждения
Т400 — таймер фазы обнаружения
N400 — таймер числа повторных ошибок
N401 — таймер максимального числа октетов в поле информации I-кадра
К — максимальное число ожидаемых подтвержденных I-кадров
V(S) — переменная состояния
V(A) — переменная подтверждения
N(S) — номер последнего подтвержденного I-кадра
V(R) — переменная состояния приема
N(R) — порядковый номер передачи
UI — ненумерованная информация (Unnumbered information)
BRK — прерывание
BRKACK — подтверждение прерывания
V(A) — переменная подтверждения
N(SB) — переменная состояния передачи разрыва
N(RB) — переменная состояния приема разрыва
FCS — проверочные биты
РОС — решающая обратная связь
DLCI — идентификатор соединения по звену данных (Data link connection identifier)
C/R — бит команда/ответ
FA — бит расширения поля адреса
Р — бит запроса
P/F — бит запроса/ответа
REJ — неприем (Reject)
I — информация
RR — готов к приему (Receive ready)
RNR — не готов к приему (Receive not ready)
SREJ — выборочный неприем (Selective reject)
SABME — установить расширенный асинхронный балансный режим (Set asynchronous balanced mode extend)
DM — режим разъединения (Disconnect mode)
DISC — разъединено (Disconnect)
UA — ненумерованное подтверждение (Unnumbered acknowledgment)
FRMR — некорректный кадр (Frame reject)
XID — идентификация обмена (Exchange indentification)
TEST — проверка
DS — необязательный вариант «Обработка прерываний»
GI — идентификатор группы
GL — длина группы
PI — идентификатор параметра
PL — длина параметра
PV — значение параметра
FI — идентификатор формата
ADP — комбинация обнаружения ответчика
ODP — комбинация обнаружения инициатора
5 ФАЗЫ ПРОЦЕДУР УПРАВЛЕНИЯ ПРОЦЕССОМ ИСПРАВЛЕНИЯ ОШИБОК
5.1 АПД должна принимать от ООД стартстопные данные и передавать их в синхронном режиме (протокол LAPM — Link Access Procedure for Modems).
АПД может состоять из УЗО и УПС, объединенных в одно устройство, или отдельных изделий УЗО и УПС в соответствии с рисунком 1.
Рисунок 1 — Ошибкоисправляющая АПД
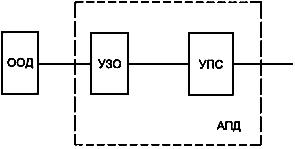
Рисунок 1 — Ошибкоисправляющая АПД
Взаимодействие ООД и АПД должно осуществляться в соответствии со стыком устройств защиты от ошибок с оконечным оборудованием данных по ГОСТ 18145.
Взаимодействие АПД с каналом связи должно осуществляться в соответствии со стыком устройств преобразования сигналов с каналом связи по ГОСТ 25007.
5.2 Полный цикл функционирования процедуры передачи информации и защиты от ошибок должен состоять из пяти последовательных фаз:
— «Обнаружение»,
— «Согласование/индикация»,
— «Установление логического соединения»,
— «Передача информации»,
— «Завершение логического соединения».
Примечание — Допускаются обходы фаз. Причины, вызывающие обход, приведены ниже.
5.3 Фаза «Обнаружение» должна определять способность удаленной АПД исправлять ошибки.
В фазе «Обнаружение» УЗО должно находиться непосредственно после установления физического соединения и включения.
5.4 В фазе «Согласование/индикация» должно происходить согласование и/или индикация параметров и факультативных процедур, которые определяют работу УЗО, если это необходимо.
Примечание — При отсутствии необходимости в согласовании допускается обход этой фазы и переход непосредственно к фазе «Установление логического соединения» или к фазе «Завершение логического соединения», если нет необходимости в передаче информации.
5.5. В фазе «Установление логического соединения» должна происходить подготовка условий, необходимых для передачи данных, и переход из фазы «Обнаружение» или «Согласование/индикация» в фазу «Передача информации».
Примечание — Допускается переход из фазы «Установление логического соединения» в фазу «Завершение логического соединения» в результате отказа одной из станций передавать информацию по какой-либо причине.
5.6 В фазе «Передача информации» должна осуществляться передача информации от источника к получателю. После завершения передачи информации по инициативе источника или получателя должен происходить переход к фазе «Завершение логического соединения».
Примечание — В результате ухудшения характеристик канала связи или отказа оборудования на одной из станций могут возникнуть условия, когда передача информации невозможна. В этом случае допускается переход к фазе «Завершение логического соединения» или к фазе «Установление логического соединения».
5.7 В фазе «Завершение логического соединения» должны подготавливаться условия для полного логического разъединения станций.
6 СИСТЕМНЫЕ ПАРАМЕТРЫ
6.1 В различных процедурах протокола защиты от ошибок должны использоваться таймеры, необходимые для правильного функционирования протокола. Запуск или перезапуск таймера должен означать, что таймер устанавливается на подсчет от предварительно установленного значения. Остановка таймера должна означать, что он больше не считает и его показание в момент остановки не имеет значения.
6.2 Таймер фазы обнаружения (Т400) должен определять интервал времени, в течение которого УЗО (вызывающее или отвечающее) ожидает ADP или ODP. Информация об этом таймере не должна передаваться в кадрах XID. Безусловное значение таймера Т400 равно 750 мс.
Примечание — При реализации может быть предусмотрен механизм установки пользователем значений таймера, отличных от безусловного значения.
6.3 Таймер подтверждения (Т401) должен определять интервал времени, в течение которого УЗО ожидает подтверждения, прежде чем обратиться к другому действию (например, к передаче какого-либо кадра). Информация об этом таймере не должна передаваться в кадрах XID. Значения таймеров Т401 на местной и удаленной АПД могут быть различны.
6.4 Таймер N400 должен определять максимальное число повторных попыток УЗО выполнить какую-либо процедуру, требующую ответа. Информация об этом таймере не должна передаваться в кадрах XID. Значения таймеров N400 на ближней и удаленной АПД могут быть различны. Безусловное значение таймера N400 равно 1.
6.5 Таймер N401 должен определять максимальное число октетов в поле информации I-кадра, кадров XID, UI или TEST. Безусловное значение таймера N401 равно 128 октетам. С помощью кадра XID отдельно для каждого направления может быть согласовано другое значение таймеров N401.
6.6 Размер окна должен определять максимальное число ожидающих подтверждения I-кадров. Безусловное значение
равно 15 для обоих направлений передачи. С помощью кадра XID отдельно для каждого направления может быть согласовано другое значение
.
6.7 Каждое соединение должно иметь соответствующую переменную состояния V(S). Переменная V(S) должна обозначать порядковый номер следующего I-кадра, который должен быть передан. Значение переменной V(S) должно меняться от нуля до и увеличивается на единицу при каждой успешной передаче I-кадра. Значение переменной V(S) должно не превышать значения переменной V(A) более чем на максимальное число
ожидающих подтверждения I-кадров.
6.8 Каждое соединение должно иметь соответствующую переменную состояния подтверждения V(A), указывающую последний подтвержденный кадр. Значение V(A)-1 должно быть равно номеру N(S) последнего подтвержденного I-кадра. Переменная V(A) должна принимать значения от нуля до и обновляться действительными значениями номера N(R), получаемыми от корреспондента. Действительным значением номера N(R) считают значение, находящееся в диапазоне.
6.9 Каждое соединение должно иметь соответствующую переменную состояния приема V(R), обозначающую порядковый номер следующего по порядку I-кадра, который, как ожидается, должен быть принят. Переменная V(R) должна принимать значения от нуля до и увеличивается на единицу при приеме свободного от ошибок очередного I-кадра, у которого номер N(S) равен значению переменной V(R).
6.10 Каждый передаваемый I-кадр должен содержать порядковый номер передачи N(S). В момент передачи I-кадра значение номера N(S) должно устанавливаться равным значению переменной V(S).
6.11 Каждый передаваемый I- или S-кадр должен содержать ожидаемый порядковый номер N(R) следующего принимаемого I-кадра. В момент передачи I- или S-кадра значение номера N(R) должно устанавливаться равным значению переменной V(R). Значение номера N(R) указывает, что передавшее номер N(R) УЗО правильно приняло все I-кадры с номерами до N(R)-1 включ.
6.12 Чтобы различать первоначальный и повторный кадры UI, передающие информацию о разрыве, УЗО должно выполнять операции порядковой нумерации кадров UI по модулю 2 в поле информации кадров UI. Для этой цели должен использоваться бит 8 первого октета в поле информации. Если передается сообщение BRK, то этот бит должен являться порядковым номером передачи разрыва N(SB), если передается сообщение BRKACK, то этот бит должен являться порядковым номером приема разрыва N(RB).
6.13 Переменная состояния передачи разрыва V(SB) должна выражать значение номера N(SB) в следующем сообщении BRK. Переменная V(SB) должна дополняться каждый раз, когда переданное сообщение BRK правильно подтверждается сообщением BRKACK. Вначале, когда установлено физическое соединение, значение переменной V(SB) должно устанавливаться в нуль, она не должна сбрасываться даже при повторном установлении соединения.
6.14 Переменная состояния приема разрыва V(RB) должна выражать ожидаемое значение номера N(SB) в следующем сообщении BRK, которое должно быть принято. Если номер N(SB) в следующем принятом сообщении BRK равен значению переменной V(RB), то значение переменной следует дополнить до передачи сообщения BRKACK. Вначале, когда установлено физическое соединение, значение переменной V(RB) должно устанавливаться в нуль, она не должна сбрасываться даже при повторном установлении соединения.
7 ТИПЫ КАДРОВ
7.1 Информация должна передаваться с помощью кадров, которые открываются и закрываются флагами (01111110).
Примечание — При последовательной передаче кадров по каналу допускается использовать одну и ту же комбинацию флага в качестве закрывающей для одного кадра и открывающей для последующего кадра. Если нет необходимости в передаче по каналу кадров, то возникающий временной промежуток между кадрами заполняется непрерывно следующими друг за другом комбинациями флаг.
7.2 Должны использоваться два вида структуры кадров в соответствии с рисунком 2.
Рисунок 2 — Структура кадра
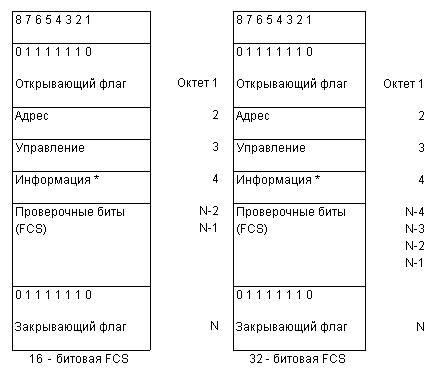
_________________
* He все типы кадров имеют поле информации
Рисунок 2 — Структура кадра
Максимальный размер поля адреса должен быть ограничен двумя октетами. Поле управления должно состоять из двух октетов для кадров с порядковыми номерами и одного октета для кадров без порядковых номеров.
7.3 Для обеспечения прозрачности должна производиться проверка в передатчике содержимого кадра между открывающим и закрывающим флагами и вставления бита «0» после каждой последовательности из пяти идущих подряд битов «1». Приемник должен проверять содержимое кадра между открывающим и закрывающим флагами и отбрасывать любой бит «0», который следует непосредственно после пяти идущих подряд битов «1».
7.4 Вводят три типа кадров:
— информационный (I-кадр);
— служебный контролирующий (S-кадр);
— служебный ненумерованный (U-кадр).
7.5 Информационный кадр (I-кадр) должен содержать информационное поле, используемое для размещения информации, получаемой от источника информации. Длина информационной части может быть любой, кратной байту (8-элементному знаку), но ограниченной сверху предельной длиной используемого помехоустойчивого ()-кода. По умолчанию длина информационной части равна 128 байтам.
7.6. Служебный контролируемый кадр (S-кадр) используют для выполнения функций решающей обратной связи (РОС):
— подтверждения I-кадров;
— запроса повторной передачи одного или нескольких I-кадров;
— запроса временного прекращения передачи I-кадров.
7.7 Служебный ненумерованный кадр (U-кадр) используют для обеспечения дополнительных процедур управления соединением и передачи информации без номеров (установлением и завершением соединения, тестирования, идентификации и др.).
7.8 Структура поля адреса должна соответствовать приведенной в таблице 1.
Таблица 1
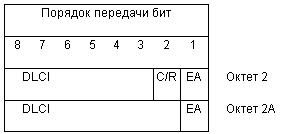
Поле адреса должно содержать идентификатор соединения по звену данных — Data Link Connection identifier (DLCI), бит команда/ответ (C/R) и бит расширения поля адреса (ЕА). DLCI должен использоваться при передаче информации между двумя ООД (местной и удаленной) и служить для идентификации соединения между ними. Значение DLCI равно 0 (00000000). Бит C/R должен определять, является ли кадр командой или ответом. Командный кадр должен содержать адрес удаленной станции, ответный кадр должен содержать адрес местной станции. Для заданного соединения значение DLCI в поле адреса должно остаться одним и тем же, а бит C/R должен определяться в таблице 2.
Таблица 2
|
Команда/ответ |
Направление |
Значение C/R |
|
Команда |
Инициатор |
1 |
|
Ответчик |
0 |
|
|
Ответ |
Инициатор |
0 |
|
Ответчик |
1 |
Примечание — Размер поля адреса может быть расширен. Первый передаваемый бит каждого октета в поле адреса указывает, является ли октет последним в этом поле. Если ЕА=1, то это означает, что этот октет является последним в этом поле адреса. Если ЕА=0, то за этим октетом следует второй октет поля адреса. Когда используют факультативное двухоконное поле адреса, то в состав DLCI включают биты 8…2 октета 2А в соответствии с таблицей 1.
7.9 Структура поля управления для всех трех типов кадров должна соответствовать таблице 3.
Таблица 3
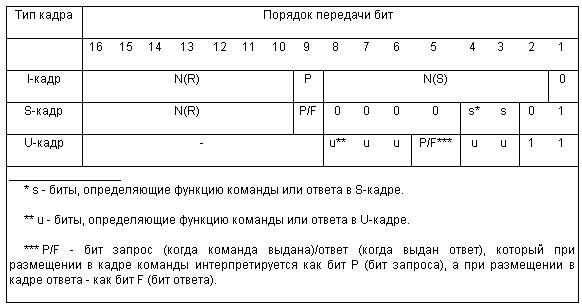
7.10 Каждый I-кадр должен последовательно нумероваться и может иметь номер от нуля до , где
128 — модуль порядковых номеров.
7.11 В каждом кадре должно быть поле комбинации проверки кадра (FCS). В этом поле должны размещаться проверочные биты. Могут использоваться два циклических кода с образующими многочленами
![]() или
или
![]()
В первом случае поле FCS должно состоять из двух октетов, во втором — из четырех.
Проверочные биты должны быть равны дополнению до единицы суммы по модулю два следующих двух чисел:
— остатка от деления ![]() [или
[или
где — число битов в кадре, находящихся между последним битом открывающего флага и первым битом FCS, за исключением битов, вставляемых для обеспечения прозрачности;
— остатка от деления на образующий многочлен [или
] произведения
[или
] на содержимое кадра, находящееся между последним битом открывающего флага и первым битом FCS, за исключением битов, вставляемых для обеспечения прозрачности.
При типичной реализации в передатчике первоначальное содержимое регистра в устройстве, вычисляющем остаток от деления, устанавливают равным одним единицам, а затем изменяют при делении содержимого полей адреса, управления и информации на образующий многочлен [или
]. Затем определяют дополнение остатка от деления до единицы.
При типичной реализации в приемнике первоначальное содержимое регистра в устройстве, вычисляющем остаток от деления, устанавливают равным одним единицам. При отсутствии ошибок проверочные биты должны быть равны 0001 1101 0000 1111, при использовании образующего многочлена , или 1100 0111 0000 0100 1101 1101 0111 1011, при использовании образующего многочлена
).
7.12 Кадр считают недействительным, если он:
— не ограничен должным образом двумя флагами;
— содержит менее пяти (семи) октетов между флагами в кадрах с порядковыми номерами и менее четырех (шести) октетов между флагами в кадрах без порядковых номеров в случае 16-битовой (32-битовой) FCS;
— содержит нецелое число октетов до вставления битов «нуль» или после отбрасывания битов «нуль»;
— имеет ошибки;
— имеет поле адреса, которое содержит более двух октетов или имеет значение DLCI, не поддержанное приемником.
Недействительные кадры отбрасывают без уведомления передатчика. Прием такого кадра не требует выполнения каких-либо действий. В качестве альтернативной процедуры в этом случае можно передать S-кадр с командой REJ.
7.13 Получение семи или более идущих подряд битов «1» интерпретируют как аннулирование. Принимаемый в это время кадр игнорируют.
7.14 I-кадр идентифицируют в соответствии с таблицей 3 первым передаваемым битом области управления, бит 1, если этот бит равен 0, то принятый кадр является I-кадром.
S-кадр идентифицируют в соответствии с таблицей 3 первыми двумя передаваемыми битами области управления, биты 1 и 2, если эти биты составляют двоичное число 01, то принятый кадр является S-кадром.
U-кадр идентифицируют в соответствии с таблицей 3 первыми двумя передаваемыми битами области управления, биты 1 и 2, если эти биты составляют двоичное число 11, то принятый кадр является U-кадром.
8 КОМАНДЫ И ОТВЕТЫ
8.1 Команды и ответы используют для управления процедурой передачи информации и переключением режимов работы УЗО. Перечень команд и ответов, передаваемых в I-, S- и U-кадрах, должен соответствовать таблице 4. Те типы кадров, которые не входят в таблицу 4, считают неопределенными командами и/или ответами. Для определения команды или ответа, а также для определения бита Р или F в кадре используют следующее правило адресации:
— кадры, содержащие команды, передаются c адресом удаленной станции;
— кадры, содержащие ответы, передаются с адресом местной станции.
Таблица 4
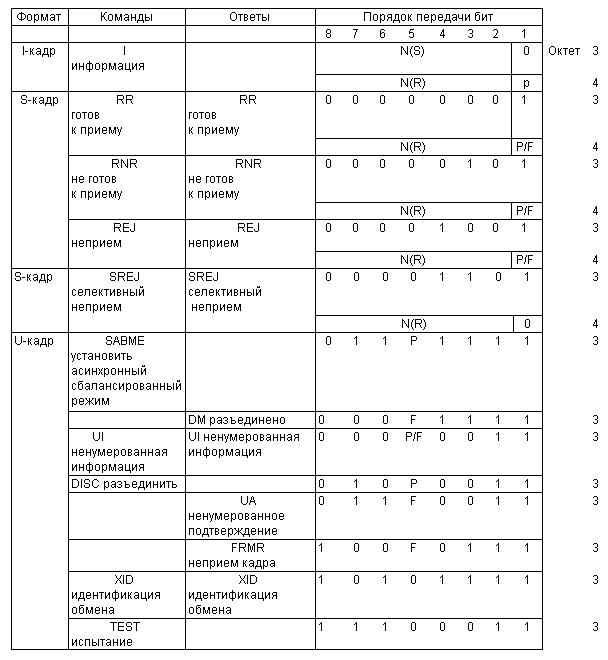
8.2 Команды и ответы I, RR, RNR, REJ и SREJ используют в режиме передачи информации для обмена информацией между местной и удаленной станциями и для организации контроля за прохождением этого обмена.
8.3 Команда «Информация» — «Information» (I) должна являться признаком наличия в I-кадре информации от источника. Содержащийся в I-кадре номер N(S) должен указывать на порядковый номер передаваемого I-кадра, а номер N(R) должен подтверждать все принятые I-кадры, переданные удаленной станцией с номерами N(S)<=N(R)-1.
8.4 S-кадры, содержащие команды и ответы RR, RNR, REJ и SREJ, не должны содержать информационного поля, и поэтому их передача и прием УЗО не должны увеличивать порядковые переменные V(S) и V(R) на передатчике и приемнике.
8.5 Команду и ответ «Готов к приему» — «Receive ready» (RR) используют для подтверждения ранее принятых I-кадров с номерами до N(R)-1 включ. Кроме того, ответ RR должен указывать на готовность принимать следующие I-кадры, и поэтому сообщает о снятии состояния «Занято», введенного ранее передачей команды RNR. Команда RR с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.6 Команду и ответ «Не готов к приему» — «Receive not ready» (RNR) используют для указания на состояние «Занято» на станции, ее посылающей, то есть временной неспособности принимать дополнительные входящие I-кадры. Получив такую команду или ответ, станция должна прекратить передачу I-кадров. Значение номера N(R) в кадре RNR должно подтверждать все I-кадры с номерами до N(R)-1 включ. Команда RNR с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.7 Команду и ответ «Неприем» — «Reject» (REJ) используют для запроса повторной передачи I-кадров, начиная с кадра, имеющего номер N(R). Значение N(R) должно подтверждать I-кадры с номерами до N(R)-1 включ. Кроме того, кадр REJ должен указывать на снятие состояния «Занято», введенного передачей кадра RNR. Команда REJ с битом Р=1, кроме указания на состояние станции, может использоваться этой станцией для запроса о состоянии удаленной станции.
8.8 Команду и ответ «Выборочный неприем» — «Selective reject» (SREJ) используют для запроса повторной передачи только одного I-кадра с номером N(R). Бит P/F кадра SREJ всегда установлен в нуль, номер N(R) не должен подтверждать каких-либо I-кадров.
8.9 Ненумерованные U-кадры используют для указания состояния посылающих их станций.
8.10 Команду «Установить расширенный асинхронный балансный режим» — «Set asynchronous balanced mode extend» (SABME) используют для перевода станции в фазу «Установление соединения». В команде SABME должно отсутствовать поле информации. Удаленная станция должна подтвердить прием команды SABME путем передачи ответа UА. После приема этой команды переменные состояния V(S), V(A) и V(R) устанавливают в нуль. Передача команды SABME должна указывать на прекращение всех особых состояний.
Переданные ранее I-кадры и не подтвержденные к моменту обработки этой команды должны остаться неподтвержденными и отбрасываются.
8.11 Команду «Разъединено» — «Disconnect» (DISC) используют для перехода в фазу «Завершение логического соединения». В командe DISС отсутствует поле информации. Станция, принявшая команду DISС, должна подтвердить получение команды DISC передачей ответа UA. Станция, передавшая команду DISC, по получении ответа UA или DM должна заканчивать соединение.
Переданные ранее I-кадры и не подтвержденные к моменту обработки этой команды должны оставаться неподтвержденными и отбрасываются.
8.12. Команду и ответ «Ненумерованная информация» — «Unnumbered information» (UI) используют для передачи управляющей информации, не входящей в поток информации от ООД, которая передается l-кадрами. Эта информация может быть связана с потоком информации от ООД (например, с сигналом «Прерывание»). Поле управления кадра UI не должно содержать порядковых номеров. Бит P/F устанавливают в нуль.
Первый октет информационной области кадра UI кодируют для указания применения области в соответствии с таблицей 5.
Таблица 5
|
Тип сообщения |
8 7 6 5 4 3 2 1 |
|
BRK |
X 1 0 0 0 0 0 0 |
|
BRKACK |
X 1 1 0 0 0 0 0 |
|
Примeчаниe — Значения Х устанавливаются, как описано ниже |
Сообщение BRK кодируют в соответствии с таблицей 6. Бит 8 первого октета используют как порядковый номер по модулю два.
Таблица 6
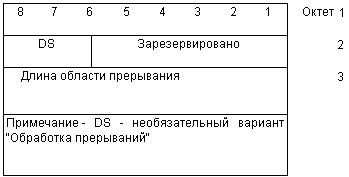
Бит D (бит 8 октета 2) должен указывать, следует ли сбрасывать данные, накопленные ранее, но еще не доставленные. Если D=0, данные не сбрасываются, если D=1, то данные сбрасываются.
Бит S (бит 7 октета 2) должен указывать, доставлять область прерывания в порядке следования по отношению к данным (S=0) или область прерывания должна предшествовать всем ранее принятым, но не доставленным данным (S=1).
В октете 3 в двоичном исчислении кодируют длину области прерывания в отрезках времени, состоящих из 10 мс. Для указания продолжительности прерывания более 2,54 с используют значение «11111111». Отсутствие длины области прерывания в принятом сообщении должно восприниматься как прерывание с предварительно определенной длиной.
Сообщение BRKACK должно содержать только один октет. Бит 8 этого октета используют в качестве порядкового номера по модулю два.
8.13 Ответ «Ненумерованное подтверждение» — «Unnumbered acknowledgement» (UA) используют для подтверждения получения и приема команд установки режима (SABME и DISC). Принятые команды установки режима не должны обрабатываться, пока не будет передан ответ UA. В ответе UА должно отсутствовать поле информации. Передача ответа UA должна указывать на прекращение состояния «Занято», о котором было сообщено раньше передачей RNR из этой же станции.
8.14 Ответ «Режим разъединения» — «Disconnect mode» (DM) используют для сообщения, что передающая его станция логически отключена и/или не может установить соединение. В ответе DM должно отсутствовать поле информации.
8.15 Ответ «Некорректный кадр» — «Frame reject» (FRMR) используют для сообщения о некорректной ситуации, возникшей на одной из станций в результате обработки кадра, принятого без обнаруженной ошибки.
Примечание — Такая ситуация может возникнуть в результате приема в команде или ответе неопределенного или невыполнимого поля управления, приема кадра с ненормальной длиной, приема недействительного номера N(R). Неопределенным считают поле управления, у которого кодирование не совпадает с таблицей 4. В этом ответе непосредственно за полем управления посылают поле информации из пяти октетов, содержащее обоснование ответа FRMR. Формат этого поля информации соответствует таблице 7.
Таблица 7
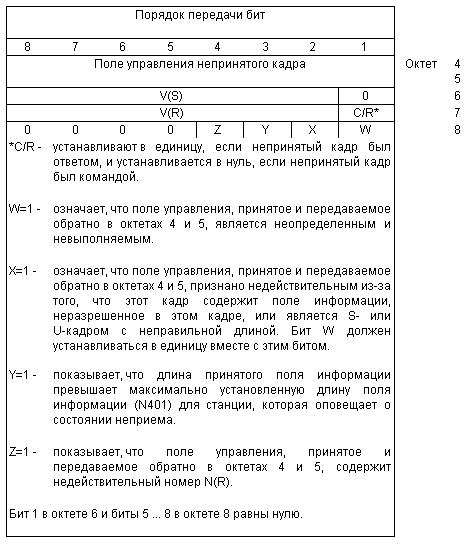
Поле управления непринятого кадра должно являться полем управления полученного кадра, который вызвал неприем кадра. Если непринятый кадр является U-кадром, то поле управления непринятого кадра размещают в октете 4, при этом октет 5 устанавливают в 00000000.
8.16 Команду и ответ «Идентификация обмена» — «Exchange Identification» (XID) используют для передачи общей информации об идентификации обмена. В поле управления кадра XID не должно быть порядковых номеров. Бит P/F кадра XID устанавливают в нуль.
Поле информации кадров XID используют для согласования/индикации значений параметров. Общая структура поля информации кадра XID должна соответствовать рисунку 3.
Рисунок 3 — Общий формат поля информации XID
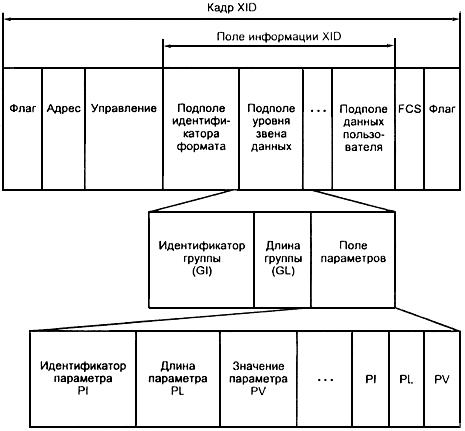
Рисунок 3 — Общий формат поля информации XID
Поле информации должно состоять из:
— подполя идентификатора формата;
— несколько подполей уровня звена данных;
— подполя данных пользователя.
Подполе идентификатора формата (FI) должно состоять из одного октета и являться первым октетом поля информации кадра XID. Идентификатор формата FI кодируют так, чтобы он мог обозначать 128 различных форматов, стандартизированных ИСО 8885, и 128 различных форматов, определяемых пользователем. Каждый стандартизированный ИСО 8885 формат должен прикрепляться к отдельному значению FI, и только такой формат, определенный в данный момент, является форматом «общего назначения».
Подполя уровня звена данных используют для указания на различные характеристики уровня звена данных, например на рабочие параметры. Все подполя содержат идентификатор группы (GI) длиной один октет, длину группы (GL) длиной в два октета и поле параметров, длина которого задана в GL. Поле параметров также разделяют на несколько наборов из идентификатора параметра (PI), длины параметра (PL) и значения параметра (PV). Длина параметра должна иметь только один октет.
Идентификатор группы GI должен указывать на подполе данных пользователя, используемое совместно с FI «общего назначения».
Для согласования/индикации значений параметров и факультативных процедур подполе FI должно кодироваться как «10000010».
При согласовании/индикации должно присутствовать только подполе уровня звена данных, связанное с «согласованием параметра». Это подполе должно иметь значение GI, равное «10000000». Длина этого подполя (GI) должна зависеть от реальной информации, подлежащей передаче.
Каждый параметр, подлежащий согласованию и/или индикации, обозначают с помощью идентификатора параметра PI. Значения PI должны соответствовать таблице 8.
Таблица 8
|
PI |
Параметр/процедура |
Единицы |
|
|
Десятичный |
Двоичный |
||
|
3 |
00000011 |
Дополнительные функции HDLC |
Октеты Примечание 1 |
|
5 |
00000101 |
Максимальная длина поля информации, направление передачи |
Биты Примечание 2 |
|
6 |
00000110 |
Максимальная длина поля информации, направление приема |
Биты Примечание 2 |
|
7 |
00000111 |
Размер окна ( |
Кадры |
|
8 |
00001000 |
Размер окна ( |
Кадры |
|
Примечания 1 Длина этого поля равна 3 октетам, то есть PI=3. Биты этих октетов образуют 24-битовый шаблон, в котором каждый бит выделяется для конкретной дополнительной функции HDLC. Бит 1 этой маски является младшим битом октета 1 и передается первым, бит 9 является младшим битом октета 2 и т.д. Для факультативных процедур выделены биты: 3 — процедура селективной повторной передачи (SREJ), 14 — процедура шлейфного испытания (TEST), 17 — процедура с расширенной FCS (32-битовая FCS). Битовая позиция, установленная в единицу, означает запрос/согласие на использование процедуры. Битовая позиция, установленная в 0, означает отсутствие запроса/отсутствие согласия на использование процедуры. Передатчик командного кадра XID устанавливает в единицу битовые позиции 2, 4, 8, 9, 12 и 16. Передатчик ответного кадра XID также устанавливает эти битовые позиции в единицу, однако, если бит 17 установлен в единицу, то бит 16 устанавливается в нуль. Приемник этих кадров игнорирует эти битовые позиции. 2 Величина N401 определена в октетах, однако при согласовании используют единицы бит. 3 Значение PL должно быть минимальным числом октетов, необходимых для выражения значения параметра. 4 Значение параметра для PI, равного 5, 6, 7 и 8, должно иметь двоичное кодирование. Первый бит в октете является младшим битом. Если для выражения значения параметра нужно несколько октетов, первый октет содержит старшие биты. |
Подполе данных пользователя может присутствовать независимо от выполнения согласования и/или индикации. Это подполе должно иметь значение GI, равное «11111111».
8.17 Команду «Проверка» — «Test» (TEST) используют для проведения шлейфных испытаний между двумя УЗО. В поле управления кадра TEST не должно быть порядковых номеров. Бит Р кадра TEST устанавливают в нуль.
9 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ «ОБНАРУЖЕНИЕ»
9.1 Если между местной и удаленной УПС установлено физическое соединение, то инициатор соединения должен передать комбинацию обнаружения инициатора (ODP) — 0 1000 1000 1 11 … 11 0 1000 1001 1 11 … 11.
Комбинация ODP должна состоять из знака DC1 с проверкой на четность, далее следуют от 8 до 16 единиц, затем следует знак DC1 с проверкой на нечетность, после чего следуют от 8 до 16 единиц. Комбинация ODP должна передаваться в течение выдержки таймера Т400 или до получения комбинации обнаружения ответчика (ADP).
Передача всегда должна вестись с использованием функции скремблера в УПС с синхронизацией от тактовой частоты, выделенной из тонального сигнала.
Инициатор соединения должен проверять входящий от УПС поток битов на наличие ADP. Правильно получив знаки на менее двух смежных ADP, инициатор соединения должен принимать решение, что эта комбинация обнаружена.
Если комбинация ADP не обнаружена в течение интервала Т400, то после завершения повторения последней ODP инициатор соединения должен принимать решение, что ответчик не способен работать в режиме исправления ошибок. В этом случае инициатор соединения переключается на режим без исправления ошибок.
Если комбинация ADP получена до истечения времени таймера Т400, то инициатор соединения должен прекратить передачу комбинации ODP и перейти в фазу «Согласование/индикация».
9.2 На приеме, получив индикацию об успешном установлении соединения между УПС, ответчик должен передать биты 1 (рабочее состояние) до окончания фазы обнаружения (прием комбинации ODP или обнаружения начала фазы «Согласование/индикация» — получение непрерывной последовательности флагов).
Ответчик должен проверить входящий поток битов от УПС на наличие комбинации ODP. Правильно получив не менее четырех знаков DC1 с чередующейся проверкой на четность и нечетность, ответчик должен принимать решение, что комбинация ODP обнаружена.
Если после установления физического соединения комбинация ODP в течение выдержки таймера N400 не обнаружена, и не будет обнаружено начало фазы «Согласование/индикация» в течение этого же интервала, то ответчик должен принять решение, что инициатор соединения не способен работать в режиме исправления ошибок, и переключиться на режим без исправления ошибок.
Если комбинация ODP обнаружена, то ответчик должен принять решение, что инициатор соединения способен работать в режиме исправления ошибок и требовать перехода в фазу «Согласование/индикация». Ответчик должен передать десять раз одну из комбинаций обнаружения ответчика (ADP):
— 0 1010 0010 1 11 … 11 0 1100 0010 1 11 … 11, (Е) и (С), разделенные 8 …16 единицами, если режим исправления ошибок поддерживается;
— 0 1010 0010 1 11 … 11 0 0000 0000 1 11 … 11, (У) и (нуль), разделенные 8 …16 единицами, если режим исправления ошибок не поддерживается.
Биты в этих комбинациях перечисляют слева направо в порядке передачи, то есть бит младшего разряда передается первым. Передачу всегда ведут с использованием функции скремблера в УПС с синхронизацией от тактовой частоты, выделенной из тонального сигнала. То есть без использования в УПС какого-либо внутреннего средства подстройки под асинхронную скорость, которое могло бы быть использовано в режиме без исправления ошибок.
10 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ «СОГЛАСОВАНИЕ/ИНДИКАЦИЯ»
10.1 УЗО должно переходить в фазу «Согласование/индикация» при наступлении одного из следующих событий:
— обнаружена комбинация ADP
— или если его не удовлетворяют безусловные значения параметров и процедур.
Иначе оно должно переходить сразу в фазу «Установление логического соединения».
10.2 Процедура «Согласование/индикация» начинается передачей кадра XID. Если УЗО находится в состоянии «соединено», то сначала передают на удаленный конец командный кадр RNR с битом Р=1, затем прекращают передачу I-кадров. Это необходимо сделать, так как подвергающиеся согласованию/индикации параметры или процедуры могут повлиять на процедуры, управляющие передачей I-кадров.
Информационное поле кадра XID используют для передачи параметров или процедур, подлежащих согласованию. После передачи кадра XID запускают таймер N401 и перезапускают счетчик повторных передач N400. Если этот кадр передают в качестве первого после фазы обнаружения, то сначала посылают комбинации флага в течение времени, достаточного для гарантированной передачи по меньшей мере 16 комбинаций флага. Получив командный кадр XID с новыми значениями параметров и процедур, УЗО возвращает эти значения в поле информации ответного кадра XID.
Если в фазе «Обнаружение» запрошена и согласована 32-битовая FCS, то вызываемая АПД будет способна проверять последующие кадры как по 16-битовой, так и по 32-битовой FCS одновременно (кадр отбрасывают, только если он не удовлетворяет обеим проверкам). До получения кадра SABME вызываемая АПД передает кадры с 16-битовой FCS. Получение кадра SABME с 16- или 32-битовой FCS указывает на использование соответствующей FCS во всех последующих кадрах (проверка кадров по обоим FCS может быть выключена). На прием другого командного кадра XID с 16-битовой FCS посылают ответный кадр XID с 16-битовой FCS.
После завершения согласования/индикации запоминают измененные значения параметров/процедур. Если в процессе изменения значений параметров или установок процедур было введено какое-либо состояние занятости, то передают индикацию об окончании состояния занятости.
Если таймер N401 досчитает до конца раньше получения ответного кадра XID, то УЗО повторно передает команду XID, перезапускает таймер N401 и увеличивает на единицу счетчик повторных передач N400. Если команда XID повторно передана N400 раз, но не получен ответ XID, то УЗО извещает инициатора согласования, что процедура согласования/индикации не завершена.
10.3 Для выхода из фазы «Согласование/индикация» необходимо наступление одного из следующих событий:
— правильный прием команды DISC (переход в фазу «Завершение логического соединения»);
— правильный прием команды SABME (переход в фазу «Установление логического соединения»);
— правильный прием команды DM (переход в фазу «Завершение логического соединения»);
— истечение таймера Т401 (переход в фазу «Завершение логического соединения»).
11 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ «УСТАНОВЛЕНИЕ ЛОГИЧЕСКОГО СОЕДИНЕНИЯ»
11.1 УЗО переходит в фазу «Установление логического соединения» при наступлении одного из следующих событий:
— прием от УПС кадра без ошибок с командой SABME;
— прием от ООД сигнала о необходимости установления соединения.
11.2 УЗО, инициатор установления соединения, передает команду SABME. Все имеющиеся особые состояния прекращаются, счетчик повторных передач N400 сбрасывается, запускается таймер Т401, все данные в очереди аннулируются. Кадр SABME всегда передается с битом Р=1 для того, чтобы избежать ошибочной интерпретации ответного кадра DM.
Если кадр SABME передается в качестве первого кадра, то сначала передается комбинация флаг в течение времени, достаточного для гарантированной передачи по меньшей мере 16 комбинаций флаг.
Получив команду SABME, противоположная станция передает ответ UA с битом F, установленным в такое же двоичное значение, как и бит Р в принятой команде SABME. Переменные V(S), V(R) и V(A) устанавливаются в нуль. Логическое соединение считают установленным и УЗО переходит в состояние «Соединено». Прекращаются все имеющиеся особые состояния и состояние «Занято» своего приемника.
Если АПД не способна установить логическое соединение, то в ответ на команду SABME передается команда DM с битом F, установленным в такое же двоичное значение, как и бит Р в принятой команде SABME.
Если ответ UA принят правильно АПД, передавшей ранее команду SABME, то эта АПД переходит в фазу «Передача информации». Отсчет таймера Т401 прекращается, переменные V(S), V(R) и V(A) устанавливаются в нуль, логическое соединение считается установленным.
Получив ответ DM с битом F=1, инициатор соединения останавливает таймер N401. Ответ DM с битом F=0 игнорируется.
Если таймер Т401 досчитает до конца, а ответы UA или DM с битом F=1 еще не получены, то повторно передается команда SABME, перезапускается таймер Т401 и увеличивается на единицу счетчик повторных передач N400.
После передачи команды SABME N400 раз, в случае неполучения ответов UA или DM, АПД переходит в фазу «Завершение логического соединения», данные в очереди отбрасываются.
Если во время выполнения фазы «Установление логического соединения» правильно принята команда DISC, то таймеры Т401 и N400 прекращают счет и АПД переходит в фазу «Завершение логического соединения».
11.3 Для выхода из фазы «Установление логического соединения» необходимо наступление одного из событий:
— правильный прием команды UA с битом F, равным биту Р в переданной команде SABME;
— передача ответа UA на правильно принятую команду SABME (переход в фазу «Передача информации»);
— истечение счетчика N400 (переход в фазу «Завершение логического соединения»);
— правильный прием команды DISC (переход в фазу «Завершение логического соединения»);
— передача ответа DM (переход в фазу «Завершение логического соединения»).
12 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ «ПЕРЕДАЧА ИНФОРМАЦИИ»
12.1 Для перехода в фазу «Передача информации» необходимо наступление одного из следующих событий:
— правильный прием ответа UA на команду SABME;
— передача ответа UA на правильно принятую команду SABME.
12.2 Для обеспечения описания и понимания процедур в фазе «Передача информации» вводят три состояния, которые полностью описывают действия УЗО:
— «Передача»;
— «Занято»;
— «Неприем кадра».
Каждое из состояний обусловлено наличием или отсутствием определенных искажений информации в канале связи или нарушением работы станции.
12.3 Процедуры управления в состоянии «Передача»
12.3.1 В состоянии «Передача» отсутствуют искажения информации и нарушения в работе станции. Данные, полученные от ООД, размещаются в информационном поле I-кадра и передаются в канал связи. Удаленная станция, получив I-кадр, передает содержимое его информационного поля получателю (ООД). Та же процедура происходит в противоположном направлении. Для обеспечения идентичности порядка получения данных в поле управления параметрам N(S) и N(R) присваиваются значения переменных V(S) и V(R) соответственно. В конце передачи I-кадра значение V(S) увеличивают на единицу. Во время передачи I-кадра запускаются таймер Т401 и счетчик N400. Если значение переменной V(S) равно значению V(A)+, то УЗО не должно передавать новый I-кадр, но может повторно передать I-кадры в ходе процедур исправления ошибок.
12.3.2 Когда УЗО находится в состоянии «Занято» своего приемника, то оно может передавать I-кадры, если удаленная станция не находится в состоянии «Занято».
12.3.3 При правильном приеме I-кадра (N(S)=V(R)), если УЗО на находится в состоянии «Занято» своего приемника, оно независимо от состояния восстановления по таймеру увеличивает на единицу значение своей переменной V(R) и действует следующим образом. Если в принятом I-кадре бит Р=1, то в случае, когда удаленное УЗО не находится в состоянии «Занято», передается ответ RR с битом F=1, в случае, когда после приема этого I-кадра принимающее УЗО перейдет в состояние «Занято» своего приемника, передается ответ RNR с битом F=1.
Если в принятом I-кадре бит Р=0 и УЗО не находится в состоянии «Занято» своего приемника, когда нет I-кадра для передачи или когда имеется I-кадр для передачи, но удаленный приемник находится в состоянии «Занято», то передается ответ RR с битом F=0. Когда есть I-кадр для передачи и нет состояния «Занято» удаленного приемника, то передается I-кадр, в котором значение номера N(R) равно текущему значению переменной V(R).
Если в принятом I-кадре бит Р=0 и УЗО находится в состоянии «Занято» своего приемника, то передается ответ RNR с битом F=0. Если УЗО находится в состоянии «Занято» своего приемника, то все принимаемые I-кадры отбрасываются после обновления значения переменной V(A). Всегда, когда УЗО передает I-кадр или S-кадр с командами RR, RNR или REJ, номер N(R) устанавливается равным значению переменной V(R).
12.3.4 Получив действительный I-кадр или S-кадр с командами RR, RNR или REJ, УЗО воспринимает номер N(R) этого кадра в качестве подтверждения всех уже переданных им I-кадров с номерами от N(S) до принятого номера N(R)-1 включ. Переменная V(A) устанавливается в значение номера N(R). Таймер Т401 останавливается, когда УЗО получит действительный I-кадр или S-кадр с командами RR, RNR или REJ с номером N(R), превышающим значение переменной V(A), подтверждающим в этот момент некоторые I-кадры, или S-кадр с командой REJ с номером N(R), равным значению переменной V(A), или S-кадр с командой SREJ с номером N(R), равным или превышающим значение переменной V(A), хотя номер N(R) в S-кадре с командой SREJ не имеет функции подтверждения.
12.3.5 Если S-кадр с командами RR, RNR, или REJ с битом Р=1 был передан, но не подтвержден, таймер Т401 не останавливается. Если получен действительный I-кадр и УЗО находится в состоянии «Занято» удаленного приемника, то таймер Т401 также не останавливается. Если таймер Т401 остановлен в результате приема I-кадра и S-кадра с командами RR, RNR и имеются переданные, но еще не подтвержденные I-кадры, то таймер Т401 перезапускается. Если затем таймер досчитает до конца, то, если УЗО еще не находится в состоянии восстановления по таймеру, оно перейдет в это состояние и сбросит счетчик подсчета повторных передач; если УЗО уже находится в состоянии восстановления по таймеру, то добавляется единица к значению своей переменной подсчета повторных передач. Затем, если значение переменной подсчета повторных передач меньше значения N400, то таймер Т401 запускается и, если УЗО не находится в состоянии «Занято» своего приемника, но находится в особом состоянии неприема (то есть обнаружена ошибка в порядке следования номеров N(S) и была передана команда REJ, но запрошенный I-кадр не получен), передается команда RR с битом Р=1; если значение переменной подсчета повторных передач равно N400, УЗО начинает процедуру повторного установления соединения.
12.3.6 Состояние восстановления по таймеру закончится, когда будет получен ответ RR, RNR или REJ с битом F=1. Если номер N(R) в полученном ответе находится в диапазоне от значения своей переменной V(A) до значения своей текущей переменной V(S) включ., то УЗО устанавливает значение своей переменной V(S) равной принятому номеру N(R). Если принят ответ RR или REJ, то таймер Т401 останавливается и возобновляется передача или повторная передача I-кадра. Если принят ответ RNR, то таймер Т401 останавливается и перезапускается, и УЗО приступает к установлению состояния «Занято».
12.3.7 Если таймер Т401 остановлен в результате приема ответа REJ, то УЗО:
— если оно на находится в состоянии восстановления по таймеру, прекращает все имеющиеся состоянии «Занято» удаленного приемника; значения переменных V(S) и V(A) устанавливает равным значению номера N(R), содержащегося в поле управления принятого кадра REJ; останавливает таймер Т401; если бит Р=1, то передается команда RR с битом F=1; передается I-кадр; отмечается нарушение протокола, если принят ответ REJ с битом F=1;
— если оно находится в состоянии восстановления по таймеру и принят ответ REJ с битом F=1, то прекращает все имеющиеся состояния «Занято» удаленного приемника; устанавливает значения своих переменных V(S) и V(A) равными значению номера N(R), содержащегося в поле управления кадра REJ; останавливает таймер Т401; передает I-кадр;
— если оно находится в состоянии восстановления по таймеру и принят кадр REJ, не являющийся ответным кадром REJ с битом F=1, то прекращает имеющееся состояние «Занято» удаленного приемника; устанавливает значение своей переменной V(A) равной значению номера N(R), содержащемуся в поле управления кадра REJ; если бит Р=1, то передается ответ RR с битом F=1.
При этом при передаче I-кадра учитывается:
— если в момент получения кадра REJ передается S-кадр, то его передача завершается, а затем передается запрошенный I-кадр;
— если в момент получения кадра REJ передается команда SABME или DISC, ответ UA или DM, то запрос повторной передачи игнорируется;
— если в момент получения кадра REJ не передается никакой кадр, то передается запрошенный I-кадр.
Все неподтвержденные I-кадры, начиная с кадра, указанного в принятом кадре REJ, должны быть переданы. Другие I-кадры, которые еще не передавались, передаются после повторно передаваемых кадров.
12.3.8 Если таймер N401 был остановлен в результате приема команды SREJ, то запускается таймер Т401 и повторно передается тот I-кадр, у которого номер N(S) равен номеру N(R) кадра SREJ. Никакие другие I-кадры повторно не передаются (однако могут передаваться ожидающие первичной передачи I-кадры). При передаче I-кадров учитывают все условия, описанные при приеме кадра REJ. Если процедура селективной повторной передачи не была согласована, то прием кадра SREJ рассматривают как нераспознаваемое поле управления.
12.3.9 Если таймер Т401 досчитает до конца, то УЗО переходит к процедуре, описанной выше при остановке таймера в результате приема I-кадра или команды RR или RNR.
12.4 Процедуры управления в состоянии «Занято»
12.4.1 Состояние «Занято» возникает, когда УЗО по внутренним причинам не может обработать принятый без ошибки ожидаемый I-кадр. Такой причиной может быть, например, отсутствие резервов памяти для хранения принятого I-кадра. После перехода в состояние «Занято» УЗО передает удаленному УЗО S-кадр с командой или ответом RNR.
Если УЗО не занято операцией установки режима (то есть не передает кадр SABME или DISC), то оно после приема команды или ответа RNR устанавливает состояние «Занято» удаленного приемника. Затем, если принята команда RNR с битом Р=1, то УЗО отвечает ответом RR с битом F=1 (УЗО не находится в состоянии «Занято» своего приемника), если принят ответ RNR с битом F=1, то прекращается имеющееся состояние восстановления по таймеру, номер N(R), содержащийся в этом ответе RNR, используется для обновления значения переменной V(S). Номер из команды RR или RNR, независимо от установки бита Р, не используют для обновления переменной V(S). УЗО отмечает состояние «Занято» своего приемника и не посылает I-кадры удаленному УЗО.
После этого УЗО считает номер N(R), содержащийся в принятом кадре RNR, подтверждением всех I-кадров, которые были переданы (или повторно переданы) с номерами от N(S) до номера N(R)-1 включ., устанавливает значение своей переменной V(A) равной значению номера N(R), содержащемуся в кадре RNR, перезапускает таймер Т401, если не ожидается ответный S-кадр с командами RR, RNR или REJ с битом F=1.
12.4.2 Если таймер Т401 досчитал до конца, то УЗО, если оно еще не находится в состоянии восстановления по таймеру, переходит в состояние восстановления по таймеру и сбрасывает переменную N400 или, если оно уже находится в состоянии восстановления по таймеру, то добавляется единица к своей переменной подсчета повторных передач N400. Затем, если значение переменной подсчета повторных передач меньше N400, то УЗО передает соответствующий S-кадр с командами RR, RNR или REJ с битом Р=1, перезапускает таймер Т401; если значение переменной подсчета повторных передач равно N400, то УЗО начинает процедуру повторного установления соединения.
12.4.3 УЗО, принявшее S-кадр с командами RR, RNR или REJ с битом Р=1 отвечает S-кадром с ответом RR, RNR или REJ с битом F=1, чтобы указать, находится ли еще оно в состоянии «Занято» своего приемника. Получив S-кадр с ответом RR, RNR или REJ с битом F=1, УЗО останавливает таймер Т401; если ответом является RR или REJ, УЗО прекращает состояние «Занято» удаленного приемника, после чего может передавать новые I-кадры или повторять I-кадры; если ответом является RNR, то УЗО действует так же, как описано в начале этого раздела.
12.4.4 Если S-кадры с командами RR, RNR или REJ с битом Р, установленным в 0 или 1, или S-кадр с ответом RR, RNR или REJ с битом F=0 приняты во время запроса, то УЗО:
— если приняты команда или ответ RR или REJ, прекращает состояние «Занято» удаленного приемника и, если принята команда с битом Р=1, то передает соответствующий ответный S-кадр (см. примечание) с битом F=1. Однако передача или повторная передача I-кадров не должна производиться до получения соответствующего ответного S-кадра с битом F=1 или до окончания выдержки таймера Т401;
— если принята команда или ответ RNR, останавливает состояние «Занято» удаленного приемника и, если принята команда RNR с битом Р=1, передает соответствующий ответный S-кадр (см. примечание) с 38 битом F=1.
Примечание — Если УЗО не находится в состоянии «Занято» своего приемника, но находится в особом состоянии неприема (то есть обнаружена ошибка в порядке следования номера N(S) и был передан S-кадр REJ, но запрошенный I-кадр еще не получен), то соответствующим S-кадром является кадр RR.
12.4.5 Получив команду SABME, УЗО прекращает состояние «Занято» удаленного приемника.
Если УЗО не находится в состоянии «Занято» своего приемника, но находится в особом состоянии ошибки в порядке следования номеров N(S) (то есть обнаружена ошибка в порядке следования номеров N(S), но не был передан кадр REJ), то соответствующим S-кадром является кадр RR.
Если УЗО находится в состоянии «Занято» своего приемника, то соответствующим S-кадром является кадр REJ. В остальных случаях соответствующим S-кадром является кадр RR.
12.4.6 Когда УЗО находится в состоянии «Занято» своего приемника, оно передает кадр RNR.
Кадр RNR может быть ответом RNR с битом F=0, ответом RNR с битом F=1 (переход в состояние «Занято» произошел при приеме какого-либо командного кадра с битом Р=1), командой RNR с битом Р=1 (переход в состояние «Занято» произошел при окончании выдержки таймера Т401).
Все принимаемые I-кадры с битом Р=0 отбрасываются после обновления значения переменной V(A). Все принимаемые S-кадры RR, RNR или REJ с битом Р=1 обрабатываются, значение переменной V(A) обновляется, передается ответ RNR с битом F=1.
12.4.7 Для того, чтобы сообщить удаленному УЗО об окончании состояния «Занято» своего приемника, местная УЗО передает кадр RR или, если ранее обнаруженный порядковый номер N(S) еще не был сообщен, кадр REJ с его номером N(R), равным текущему значению переменной V(R), или кадр SREJ (если его использование согласовано).
Передача команды SABME или ответа UA (в ответ на команду SABME) также указывает удаленной УЗО на окончание «Занято» собственного приемника.
12.4.8 УЗО должно иметь возможность извещать ООД о временной неспособности принимать данные по цепи 103 (состояние неготовности АПД) и распознавать соответствующее извещение от ООД (состояние неготовности ООД). Получив такое извещение АПД и ООД должны завершить передачу частично переданного знака и затем прекратить передачу данных по цепи 104(103) и заблокировать цепь 104(103) в состояние двоичной 1. После снятия состояния неготовности АПД(ООД) может восстановить передачу данных по цепи 104(103).
12.4.9 Управление передачей данных от ООД к АПД (или от АПД к ООД) может осуществляться одним из двух способов:
— использованием цепей 103 и 106: состояние неготовности АПД указывается размыканием цепи 106 и снимается замыканием цепи 106; состояние неготовности ООД устанавливается размыканием цепи 133 и снимается замыканием цепи 133;
— использованием знаков DC1/DC3 (функций Х ВКЛЮЧЕНО/Х ВЫКЛЮЧЕНО): состояние неготовности АПД указывается передачей знака DC3 и снимается передачей знака DC1 по цепи 104; состояние неготовности ООД указывается приемом знака DC3 и снимается при приеме знака DC1 по цепи 103.
Знаки DC1 и DC3, получаемые от ООД, можно, факультативно, оставлять в потоке данных. Должны обеспечиваться оба способа, но способ выбирает пользователь.
12.4.10 Время реакции АПД при указании на состояние неготовности ООД и время реакции ООД при указании на состояние неготовности АПД следует делать минимально возможными. АПД должна учитывать запаздывание ООД при опознавании указания о неготовности АПД путем приема нескольких знаков по цепи 103 после выдачи этого указания.
12.5 Процедуры управления в состоянии «Неприем кадра»
12.5.1 Состояние «Неприем кадра» возникает при наличии в кадре необнаруженной циклическим кодом ошибки, результатом которых может быть прием S-кадра или U-кадра с ненормальной длиной; прием недействительного номера N(R), прием I-кадра с полем информации, превышающим максимальную установленную длину, с полями управления, которые не определены в командах и ответах, приведенных в таблице 4.
12.5.2 Если состояние неприем кадра возникло при установленном логическом соединении, УЗО начинает повторное установление логического соединения. В остальных случаях кадр, вызвавший такое состояние, отбрасывается. Для нормальной работы приемник должен различать недействительные кадры от I-кадров, имеющих поле информации, превышающее максимальную установленную длину. Если принят двукратный самый длинный допустимый кадр плюс два октета, но не обнаружен флаг, то предполагается, что получен неограниченный кадр. Такой кадр отбрасывается.
12.5.3 Получив ответный U-кадр FRMR в состоянии «Логическое соединение», УЗО начинает повторное «Установление логического соединения».
12.5.4 Действия, которые УЗО выполняет при получении неожидаемого ответного кадра, должны соответствовать таблице 9.
Таблица 9
|
Неожиданный ответный кадр |
Состояние «Разъединено» |
Ожидание установления соединения |
Ожидание освобождения соединения |
Состояние «Логическое соединение» |
|
|
Восстановление по таймеру |
|||||
|
Нет |
Да |
||||
|
Ответ UA |
Игнорировать |
Ожидаемый |
Ожидаемый |
Игнорировать |
Игнорировать |
|
Ответ UA |
Игнорировать |
Игнорировать |
Игнорировать |
Игнорировать |
Игнорировать |
|
Ответ DМ |
Игнорировать |
Ожидаемый |
Ожидаемый |
Игнорировать |
Ожидаемый |
|
Ответ DМ |
Установить соединение |
Игнорировать |
Игнорировать |
Повторно установить соединение |
Повторно установить соединение |
|
Ответ RR, NR, REJ F=1 |
Игнорировать |
Игнорировать |
Игнорировать |
Игнорировать |
Ожидаемый |
|
Ответ RR, RNR, REJ |
Игнорировать |
Игнорировать |
Игнорировать |
Ожидаемый |
Ожидаемый |
|
Ответ SREJ |
Игнорировать |
Игнорировать |
Игнорировать |
Повторно установить соединение |
Повторно установить соединение |
|
Ответ SREJ |
Игнорировать |
Игнорировать |
Игнорировать |
Ожидаемый |
Ожидаемый |
|
Примечание — «Ожидаемый» означает нормальную работу протокола. |
12.6 Для выхода УЗО из фазы «Передача информации» необходимо наступление одного из событий:
— правильный прием от удаленного УЗО команды SABME (переход в фазу «Установление логического соединения»);
— правильный прием от удаленного УЗО команды DISC (переход в фазу «Завершение логического соединения»);
— получение от ООД сигнала о необходимости завершения соединения (переход в фазу «Завершение логического соединения»).
13 ПРОЦЕДУРЫ УПРАВЛЕНИЯ В ФАЗЕ «ЗАВЕРШЕНИЕ ЛОГИЧЕСКОГО СОЕДИНЕНИЯ»
13.1 Для перехода в фазу «Завершение логического соединения» необходимо: получение от ООД сигнала о необходимости завершения логического соединения или прием без ошибки команды DISC.
13.2 Процедуры управления в фазе «Завершение логического соединения» используют для возвращения к состоянию «Разъединено». Любые кадры, полученные во время процедур освобождения, кроме ненумерованных кадров, отбрасывают.
13.3 УЗО начинает процесс завершения логического соединения передачей команды DISC. Для того, чтобы избежать ошибочного распознавания принимаемого ответного кадра DM, кадр DISC всегда передается с битом Р=1. Таймер Т401 запускает и перезапускает счетчик повторных передач.
УЗО, получив команду DISC в состоянии «соединено», передает ответ UA с битом F, установленным в то же двоичное значение, что и бит Р в принятой команде DISC, и переходит в состояние «разъединено».
Если в ответ на команду DISC УЗО получит ответ UA с битом F=1 или ответ DM с битом F=1, который указывает, что удаленное УЗО уже находится в состоянии «разъединено», то оно переходит в состояние «разъединено» и останавливает таймер Т401. После этого УЗО, выдавшее команду DISC, находится в состоянии «разъединено».
Если таймер Т401 досчитает до конца раньше получения ответа UA или DM с битом F=1, то УЗО, передавшее команду DISC, повторно передает команду DISC, перезапускает таймер Т401 и увеличивает на единицу счетчик повторных передач. Если УЗО не получит правильного ответа после N400 попыток, оно переходит в состояние «разъединено».
13.4 В состоянии «разъединено» прием команды DISC вызовет передачу ответа DM с битом F, установленным в значение принятого бита Р в кадре DISC; при приеме команды SABME УЗО переходит в фазу «Установление логического соединения»; при приеме неожиданного ответа DM с битом F=0 УЗО переходит в фазу «Установление логического соединения», если оно в состоянии это сделать, в остальных случаях ответ DM игнорируется, отбрасываются кадры всех остальных типов.
ПРИЛОЖЕНИЕ А (рекомендуемое). ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОПРЕДЕЛЕННЫЕ ЗНАЧЕНИЯ ТАЙМЕРА ПОДТВЕРЖДЕНИЯ Т401
ПРИЛОЖЕНИЕ А
(рекомендуемое)
Процедура защиты от ошибок использует таймер подтверждения Т401 для обеспечения своевременного приема подтверждения от удаленной станции. Чтобы гарантировать прием такого подтверждения до окончания выдержки таймера Т401 передатчика, нужно учитывать следующие временные факторы:
— время распространения, вносимое в передачу кадра, требующего подтверждения, — ;
— время, нужное удаленной АПД на обработку принятого кадра и формирования подтверждения, — ;
— максимальное время, необходимое для завершения передачи тех кадров, которые находятся в «передающей очереди» удаленной АПД (например кадра, который уже передается, или кадра, который не может быть переставлен), — ;
— время, нужное на передачу подтверждающего кадра, — ;
— время распространения, вносимое в передачу подтверждающего кадра, — ;
— время обработки, нужное УЗО для распознавания подтверждающего кадра, — .
С учетом значений этих временных ограничений значение выдержки таймера подтверждения Т401 должно быть не менее ![]() .
.
ПРИЛОЖЕНИЕ Б (рекомендуемое). ЦЕПИ СТЫКА С2, ИСПОЛЬЗУЕМЫЕ ПРИ ИСПРАВЛЕНИИ ОШИБОК
ПРИЛОЖЕНИЕ Б
(рекомендуемое)
|
N |
Описание |
|
103 |
Передаваемые данные |
|
104 |
Принимаемые данные |
|
106 |
Готов к передаче |
|
109 |
Детектор принимаемого линейного сигнала канала данных |
|
133 |
Готов к приему |