
Показатели качества сау
Количественные оценки
качества, так называемые прямые показатели
качества, определяются по кривой
переходного процесса (рис.16).
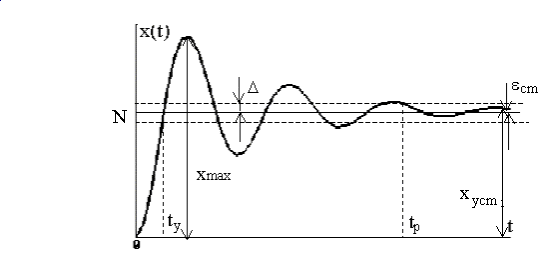
Рис.16. Переходная
функция и показатели качества
Используются следующие
прямые показатели качества:
-
величина
перерегулирования
,
![]() ;
;
характеризует
максимальное отклонение регулируемой
величины от ее установившегося значения,
которое может быть определено в
соответствии с теоремой о конечном
значении оригинала
![]() ;
;
-
время
переходного процесса или время
регулирования tp
– наименьшее значение времени, после
которого имеет место неравенство
![]() ,
,
где
— заданная величина, обычно лежащая в
пределах =0,02÷0,05;
3)
статическая ошибка сm
–
величина отклонения установившегося
значения регулируемой величины x()
от требуемого значения
N
![]()
или
![]() ,
,
гдеE(p)– изображение ошибки;
4)
время регулирования tр
– промежуток времени, по истечении
которого регулируемая величина первый
раз достигает установившегося значения.
Для определения
качества системы могут использоваться
и другие показатели, соответствующие
решаемой задаче, например, число колебаний
регулируемой величины за время
регулирования, частота и период колебаний
и т.д.
Во всех случаях
необходимо построить переходную функцию.
Коэффициенты ошибок
Точность САУ в
установившемся режиме, при относительно
медленно изменяющихся воздействиях,
может быть оценена с помощью коэффициентов
ошибок. Изображение ошибки определяется
выражением
![]() ,
,
где
![]() —
—
передаточная функция по ошибке.
Разложим передаточную
функцию системы по ошибке в степенной
ряд в окрестности точки p=0.
Отметим, что приp0,tи именно
поэтому мы говорим о точности в
установившемся режиме.
![]()
Обозначим:
![]() и получим
и получим
![]() ,
,
(8)
![]() .
.
Учитывая, что оператор
p, умноженный на
изображение самой величины, является
символом дифференцирования, можно для
оригиналов записать
![]() .
.
(9)
Выражение (9) определяет
зависимость ошибки регулирования от
различных составляющих входного
воздействия, коэффициенты Kiполучили название коэффициентов ошибок:
-
K0— коэффициент ошибки по положению;
-
K1—
коэффициент ошибки по скорости; -
K2– коэффициент ошибки по ускорению и
т.д.
Из (8) следует, что
 .
.
Численные значения
коэффициентов ошибок определяются из
этого выражения при p0.
 .
.
Очевидно, что К0=Ф(0).
Входное воздействие
можно представить в виде степенного
ряда
![]() ,
,
где g0– постоянная величина, характеризующая
начальное значение, g1=const – скорость
изменения входного воздействия, g2=const – ускорение и т.д.
Тогда
![]() .
.
Пусть передаточная
функция разомкнутой системы имеет вид
![]() ,
,
где - порядок астатизма системы. Для
передаточной функции замкнутой системы
по ошибке получим
![]() .
.
Изображение ошибки
запишется в виде
![]() .
.
Отсюда следует, что
если порядок астатизма больше порядка
старшей производной воздействия, т.е.
>m, то ошибка в
установившемся режиме будет равна нулю.
Если=m, то установившаяся
ошибка будет равна постоянной величине,
называемой статической ошибкой. И если<m, то при tи. В отношении
коэффициентов ошибок последнее выражение
позволяет сделать следующие выводы.
1). Если система
статическая, т.е.=0,
то существуют все составляющие ошибки
и все коэффициенты ошибок не равны нулю,
т.к.К0 = Ф(0)
0.
2).Система с астатизмом
1-го порядка,
=1, не имеет ошибки по положению иК0=0.
3).Система с астатизмом
2-го порядка,
=2, не имеет ошибок по положению и по
скорости иК0 =0,К1=0.
Этот список можно
продолжить. Таким образом, повышение
порядка астатизма повышает точность
системы в установившемся режиме. Но
повышение порядка астатизма снижает
запасы устойчивости, т.к. введение
интегрирующих звеньев увеличивает
фазовое запаздывание (снижает частоту
). Поэтому на
практике порядок астатизма выше второго
не применяют, а чаще всего ограничиваются
астатизмом первого порядка, используя
для повышения точности другие способы.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Как отмечалось, ошибка САУ в установившемся режиме является одним из показателей качества системы. В случае медленно изменят ющихся задающего или возмущающего воздействий ошибку системы в установившемся режиме удобно определять с помощью коэффициентов ошибок.
Ошибка следящей системы  вызываемая изменением задающего воздействия а
вызываемая изменением задающего воздействия а  в соответствии с (2.61), может быть определена
в соответствии с (2.61), может быть определена
с помощью передаточной функции системы по ошибке 

Предположим, что  можно разложить в степенной ряд относительно
можно разложить в степенной ряд относительно  сходящийся, по крайней мере, при малых значениях
сходящийся, по крайней мере, при малых значениях 

Тогда, согласно (4.22), можно записать

Этот ряд сходится в окрестности точки  Поэтому будет сходиться и оригинал ряда (4.24) при
Поэтому будет сходиться и оригинал ряда (4.24) при  т. е. ряд, в который можно разложить ошибку системы в установившемся режиме:
т. е. ряд, в который можно разложить ошибку системы в установившемся режиме:

Отсюда видно, что в общем случае ошибка системы в установившемся режиме состоит из ряда слагаемых, пропорциональных как входному сигналу  так и его производным. Слагаемые, входящие в ряд ошибок, обычно называют так:
так и его производным. Слагаемые, входящие в ряд ошибок, обычно называют так:  — ошибкой по положению (по сигналу);
— ошибкой по положению (по сигналу);  — ошибкой, вызываемой скоростью;
— ошибкой, вызываемой скоростью;  — ошибкой, вызываемой ускорением задающего воздействия и т.д., а постоянные
— ошибкой, вызываемой ускорением задающего воздействия и т.д., а постоянные  — коэффициентами ошибок. Ошибки в установившихся режимах, вызываемые изменяющимся задающим воздействием, называются динамическими. Зная коэффициенты ошибок и закон изменения задающего воздействия а
— коэффициентами ошибок. Ошибки в установившихся режимах, вызываемые изменяющимся задающим воздействием, называются динамическими. Зная коэффициенты ошибок и закон изменения задающего воздействия а  с помощью формулы (4.25) можно определить ошибку системы в установившемся режиме.
с помощью формулы (4.25) можно определить ошибку системы в установившемся режиме.
Коэффициенты ошибок выразим через параметры системы. Передаточная функция системы по ошибке связана с передаточной функцией  разомкнутой системы выражением
разомкнутой системы выражением

Учитывая, что передаточная функция системы с астатизмом  порядка в разомкнутом состоянии имеет вид
порядка в разомкнутом состоянии имеет вид

где  передаточная функция по ошибке в соответствии с выражением (4.26) будет равна:
передаточная функция по ошибке в соответствии с выражением (4.26) будет равна:

где  коэффициенты с равны сумме коэффициентов
коэффициенты с равны сумме коэффициентов  при одинаковых степенях
при одинаковых степенях 
При  (статическая система):
(статическая система):

При  (астатическая система с астатизмом
(астатическая система с астатизмом  порядка):
порядка):

На основании (4.23) и (4.27) можно записать

откуда

Раскрывая скобки в правой части полученного выражения и приравнивая коэффициенты правой и левой частей при одинаковых степенях  можно получить систему уравнений, из которой затем можно определить коэффициенты ошибок через коэффициенты с и о уравнения САУ. Значения коэффициентов ошибок будут различными для систем с различными порядками астатизма. Найдем сначала коэффициенты ошибок для статической системы
можно получить систему уравнений, из которой затем можно определить коэффициенты ошибок через коэффициенты с и о уравнения САУ. Значения коэффициентов ошибок будут различными для систем с различными порядками астатизма. Найдем сначала коэффициенты ошибок для статической системы 
Приравнивая члены левой и правой частей выражения (4.31) при одинаковых степенях  и учитывая, что
и учитывая, что  получаем следующую систему уравнений:
получаем следующую систему уравнений:

из которой можно определить коэффициенты ошибок для статической системы. Из первого уравнения находим  или, если принять во внимание, что
или, если принять во внимание, что  а также, что для случая
а также, что для случая  в соответствии с формулой
в соответствии с формулой  то
то 
Из второго уравнения находим

Аналогично можно определить и другие коэффициенты ошибок.
Таблица 4.3. (см. скан) Коэффициенты ошибок статической и астатических систем
Коэффициенты ошибок астатической системы с астатизмом первого порядка могут быть найдены из системы уравнений, полученной из выражения (4.31) приравниванием коэффициентов его левой и правой частей при одинаковых степенях  при учете, что
при учете, что 

Из первого уравнения  из второго уравнения с учетом (4.29):
из второго уравнения с учетом (4.29):

Аналогично определяются остальные коэффициенты ошибок.
В табл. 4.3 приводятся несколько первых коэффициентов ошибок Для статической и астатических систем первого и второго порядков астатизма. В качестве примера определим установившиеся ошибки САУ, обладающих различными порядками астатизма при разных задающих воздействиях.
Пример 3. Задающее воздействие изменяется по закону ступенчатой функции а  (табл. 4.4). Определить установившиеся ошибки в следящих системах, имеющих порядок астатизма
(табл. 4.4). Определить установившиеся ошибки в следящих системах, имеющих порядок астатизма 
1. Определяем производные 

Таблица 4.4. Характер реакций систем на различные задающие воздействия

2. С учетом (4.34) выражение (4.25) для ошибки принимает вид

т. е. при ступенчатом воздействии появляется только ошибка по положению.
3. Для определения  в статической системе
в статической системе  подставляем из табл. 4.3 значение
подставляем из табл. 4.3 значение  в формулу (4.35):
в формулу (4.35):  т. е. при ступенчатом задающем воздействии в статической системе возникает постоянная ошибка по положению. Эта ошибка при данном
т. е. при ступенчатом задающем воздействии в статической системе возникает постоянная ошибка по положению. Эта ошибка при данном  будет тем меньше, чем больше
будет тем меньше, чем больше  системы.
системы.
4. Установившиеся ошибки в астатических системах с астатизмом  порядка
порядка  и с астатизмом 2-го порядка
и с астатизмом 2-го порядка  т. е. ошибка по положению, а следовательно, и вся установившаяся ошибка в астатических системах при ступенчатом задающем воздействии равна нулю.
т. е. ошибка по положению, а следовательно, и вся установившаяся ошибка в астатических системах при ступенчатом задающем воздействии равна нулю.
Реакции следящих систем с порядками астатизма  на ступенчатое задающее воздействие изображены в табл. 4.4.
на ступенчатое задающее воздействие изображены в табл. 4.4.
Пример 4. Задающее воздействие изменяется по закону а  (см. табл. 4.4). Определить
(см. табл. 4.4). Определить  в следящих системах с порядком астатизма
в следящих системах с порядком астатизма 
1. Определяем производные от 

 Учитывая, что вторая и более высокие производные от а
Учитывая, что вторая и более высокие производные от а  равны нулю, формула (4.25) примет вид
равны нулю, формула (4.25) примет вид

т. е. при линейно возрастающем задающем воздействии возможно появление в системе динамических ошибок по положению и по скорости.
3. Для определения  в статической системе
в статической системе  подставляем из табл. 4.3 значения
подставляем из табл. 4.3 значения  в формулу (4.36):
в формулу (4.36):

т. е. в статической системе имеются ошибки по положению и по скорости. Ошибка
по положению при изменении задающего воздействия с постоянной скоростью возрастает во времени и поэтому  системы стремится к бесконечности.
системы стремится к бесконечности.
4. Установившаяся ошибка астатической системы с астатизмом  порядка
порядка 

т. е. в системе с астатизмом  порядка ошибка по положению равна нулю (так как
порядка ошибка по положению равна нулю (так как  Скоростная ошибка постоянна. Она пропорциональна скорости
Скоростная ошибка постоянна. Она пропорциональна скорости  изменения задающего воздействия и обратно пропорциональна коэффициенту усиления системы в разомкнутом состоянии
изменения задающего воздействия и обратно пропорциональна коэффициенту усиления системы в разомкнутом состоянии  Выражение (4.37) для скоростной ошибки, полученное с помощью коэффициентов ошибок, совпадает с ранее полученной формулой (2.75).
Выражение (4.37) для скоростной ошибки, полученное с помощью коэффициентов ошибок, совпадает с ранее полученной формулой (2.75).
5. Установившаяся ошибка астатической системы с астатизмом  порядка
порядка  т. е. в системе с астатизмом
т. е. в системе с астатизмом  порядка
порядка  при изменении
при изменении  с постоянной скоростью равна нулю. Это объясняется тем, что коэффициенты ошибок
с постоянной скоростью равна нулю. Это объясняется тем, что коэффициенты ошибок  , следовательно, ошибка по положению и по скорости в этой системе равны нулю.
, следовательно, ошибка по положению и по скорости в этой системе равны нулю.
Реакции следящих систем на задающее воздействие а  изображены в табл. 4.4.
изображены в табл. 4.4.
Пример 5. Задающее воздействие  где
где  — начальное значение
— начальное значение  — начальное значение скорости изменения а
— начальное значение скорости изменения а  — ускорение а
— ускорение а  Определить
Определить  в следящих системах с порядками астатизма
в следящих системах с порядками астатизма 
1. Определяем производные от а 

2. С учетом (4.38) выражение (4.25) принимает вид

т. е. при равноускоренном изменении задающего воздействия возможно появление в системе динамических ошибок по положению, скоростной ошибки и ошибки по ускорению.
3. Установившиеся динамические ошибки:
в статической системе 

в астатической системе с астатизмом  порядка
порядка 
т. е. при равноускоренном изменении задающего воздействия в системе с астатизмом  порядка
порядка  растет во времени до бесконечности;
растет во времени до бесконечности;
в астатической системе с астатизмом  порядка
порядка  постоянна. Она пропорциональна ускорению
постоянна. Она пропорциональна ускорению  и обратно пропорциональна
и обратно пропорциональна  системы.
системы.
Реакции систем на задающее воздействие  изображены в табл. 4.4,
изображены в табл. 4.4,

Точность САУ

План 1 Общие положения 2 Понятие о типовых режимах САУ 3 Теорема о предельном значении оригинала и методика определения установившихся ошибок 4 Ошибки статических и астатических САУ в типовых режимах 5 Ошибки САУ при произвольных входных сигналах (коэффициенты ошибок) 6 Методы повышения точности САУ

1 Общие положения Точность является важнейшим критерием качества систем. В настоящее время практически все многочисленные элементы любых технических систем изготавливаются автоматически т. е. с помощью САУ. Таким образом точность САУ определяет качество продукции, товаров, их надежность, энергопотребление, долговечность и т. д. и т. п.

2 Понятие о типовых режимах САУ Точность САУ принято оценивать по величине ошибок в типовых режимах. Типовыми называются режимы просто описываемые математически и имеющие четкий физический смысл. К ним относятся: — режим покоя, когда х(t)=const; — режим линейно-нарастающих сигналов, когда х(t)=a*t, где а=const; — режим гармонических входных сигналов, когда х(t)=A*sinωt.
 при t→∞, при типовых режимах и")
ε Итак, нам необходимо вычислить установившуюся ошибку ε(t) при t→∞, при типовых режимах и по ней можно будет судить о точности САУ.

3 Теорема о предельном значении оригинала и методика определения установившихся ошибок Сформулируем для этого теорему о предельном значении оригинала: lim. X(t)=lim. X(s), t→ ∞ s→ 0 т. е. предел оригинала при t→∞ равен пределу изображения по Лапласу при s→ 0.
 ошибку САУ")
Передаточная функция САУ по ошибке: Итак, чтобы определить установившуюся (при t→ ∞) ошибку САУ нужно: — Найти x(s) зная x(t) — Определить Fε(s) — Найти ε(s)= X(s) * Fε (s) — Определить εуст= lim ε(s) S→ 0

4 Ошибки статических и астатических САУ в типовых режимах Рассмотрим ошибки САУ в типовых режимах: 1. Ошибка САУ в покое (статическая ошибка) X(t)=X 0=const X(s)=X 0 Пусть — статическая САУ, поскольку в знаменателе нет множителя S, т. е. интегрирующего элемента в системе
 Подставляя Wp(s) в (1) получим:")
По теореме о предельном значении аргумента (1) Подставляя Wp(s) в (1) получим:
 раз меньше входной величины. y(t) X 0")
Статическая ошибка в статической САУ в (1+К) раз меньше входной величины. y(t) X 0 εст t

Пусть теперь — астатическая САУ (есть интегратор, т. е. множитель S в знаменателе передаточной функции)
 X 0 εст=0 t")
Таким образом, статическая ошибка в астатической САУ равна 0 y(t) X 0 εст=0 t
 x(t)=at a=cost Пусть:")
2. Второй типовой режим — движение с постоянной скоростью (скоростная ошибка) x(t)=at a=cost Пусть: — статическая САУ Тогда:
=at εα→∞ y(t) α t tgα=a Ошибка в статической САУ при линейнонарастающем входном сигнале")
x(t)=at εα→∞ y(t) α t tgα=a Ошибка в статической САУ при линейнонарастающем входном сигнале x(t)=at возрастает до ∞. Т. о. статические САУ в таком режиме не работоспособны.

Пусть теперь — астатическая САУ Тогда
 y(t) t Т. о. в астатических САУ при x(t)=at a=const устанавливается ошибка в")
x(t) y(t) t Т. о. в астатических САУ при x(t)=at a=const устанавливается ошибка в “К” раз меньше чем “a”, т. е. они работоспособны в таких режимах.
=xmsinωkt xm, ωk – амплитуда и")
3. Третий режим — гармонических входных сигналов. Пусть x(t)=xmsinωkt xm, ωk – амплитуда и частота “качки”. x(s) ε(s) Wp(S) y(s)

Определим амплитуду εm ошибки САУ в этом режиме. Для этого найдем: — ПФ САУ по ошибке Подставим S=jωk (1)
 справедливо и для амплитуд, т. е. Откуда следует: (2) Ак 20 lg")
Выражение (1) справедливо и для амплитуд, т. е. Откуда следует: (2) Ак 20 lg xm L(ω) Прологарифмируем (2): em ω ω=ωk Ак – контрольная точка (3)
 следует, что САУ будет иметь амплитуду ошибки не более допустимой εдоп, если")
Из (3) следует, что САУ будет иметь амплитуду ошибки не более допустимой εдоп, если

Т. о. чтобы ошибка САУ в гармоническом режиме не превышала допустимой εдоп необходимо: 1. Определить положение контрольной точки Ак с координатами: ω=ωк и 2. Обеспечить прохождение L(ω) выше контрольной точки Ак
 Пусть на вход САУ действует")
5 Ошибки САУ при произвольных входных сигналах (коэффициенты ошибок) Пусть на вход САУ действует сигнал x(t) произвольной формы. Чтобы определить ошибку ε(t) в этом случае найдем вначале ее изображение. x(s) ε(s) Wp(S) y(s)
 То: (2) Разложим далее Fε(s) по возрастающим степеням S в ряд, тогда")
Поскольку: (1) То: (2) Разложим далее Fε(s) по возрастающим степеням S в ряд, тогда (2) можно записать в виде: (3)
 к оригиналам можно записать (4) Величины")
При нулевых начальных условиях и переходя в (3) к оригиналам можно записать (4) Величины С 0, С 1, С 2 … называются коэффициентами ошибок САУ.
 необходимо: 1. Определить передаточную")
Чтобы определить ошибку САУ при произвольной форме входного сигнала x(t) необходимо: 1. Определить передаточную функцию САУ по ошибке Fε(s); 2. Разложить в ряд Fε(s) путем деления ее числителя на знаменатель и найти коэффициенты С 0, С 1, С 2 …; 3. Подставить коэффициенты ошибок в (4) и найти установившуюся ошибку ε(t).

Пример Найти ошибку в САУ при: Если:

Решение: 1. Найдем
 в степенной ряд путем деления числителя на знаменатель - -")
2. Разложим (1) в степенной ряд путем деления числителя на знаменатель — —
 имеет лишь три не")
Ограничимся первыми тремя членами ряда, т. к. входной сигнал X(t) имеет лишь три не нулевых первых производных.
 Сопоставляя (5) и (4) имеем коэффициенты ошибок: С 0=0 (6)")
3. Итак: (5) Сопоставляя (5) и (4) имеем коэффициенты ошибок: С 0=0 (6)
: (7)")
4. Определим далее производные от X(t): (7)
 в (4)")
5. Подставляя коэффициенты С 0, С 1, С 2… и производные (7) в (4) получим: Т. е. ошибка с течением времени будет нарастать до ∞ из-за члена “bt”.

6 Методы повышения точности САУ Анализируя выражения для коэффициентов ошибок отметим, что: 1. Все коэффициенты обратнопропорциональны коэффициенту К – усиления системы; 2. Чем выше порядок астатизма “v” тем большее количество первых коэффициентов ошибок равны 0

ВНИМАНИЕ Порядок астатизма “v” определяется числом интегрирующих звеньев в контуре системы. Формально “v” равно показателю степени множителя S в знаменателе передаточной функции wp.

1. Первый способ повышения точности САУ – увеличение К Т. о. самым универсальным способом повышения точности САУ являются увеличение коэффициента К усиления системы. При этом все коэффициенты ошибок уменьшаются, а это означает, что система во всех режимах работы будет иметь меньшие ошибки. Однако этот способ снижает запасы устойчивости системы и рано или поздно приводит к полной потере устойчивости. Это можно показать на примере критерия Найквиста.
 Re")
Im K 2>K 1 К 2 -1; j 0 wp(jω) Re

2. Способ повышения точности САУ – путем увеличения астатизма “v” Этот способ исключает первые коэффициенты в ряду ошибок. Действительно: v=0 (статическая САУ) Все коэффициенты не равны 0, т. е. с0≠ 0 с1≠ 0 с2≠ 0 …, т. е. статическая система в любых режимах работы, в т. ч. и в покое будет иметь ошибки
 с0=0 с1≠ 0 с2≠ 0 …, т.")
v=1 (астатическая САУ с астатизмом первого порядка) с0=0 с1≠ 0 с2≠ 0 …, т. е. такая система не будет иметь ошибки в режиме покоя. v=2 (астатическая САУ с астатизмом второго порядка) с0=0 с1=0 с2≠ 0 с3≠ 0 …, такая система не будет иметь ошибок не только в режиме покоя, но и при линейнонарастающем сигнале

К сожалению, этот способ также снижает запасы устойчивости САУ. Действительно: Im v=2 Re -1; j 0 v=1 По критерию Найквиста системы при v=0, v=1 могут быть как устойчивыми так и не устойчивыми, но при v=2 они становятся не устойчивыми при любых коэффициентах К.

3. Повышение точности САУ с использованием принципов комбинированного управления. Принцип комбинированного управления состоит в том, что в дополнение к принципу обратной связи реализуется принцип управления по возмущению. V(t) Измеритель x(t) y(t) Регулятор Объект
 оба названных принципа: - Управление по возмущению (за счет измерения возмущения")
Здесь сочетается (комбинируются) оба названных принципа: — Управление по возмущению (за счет измерения возмущения v(t) и выработки дополнительного управляющего сигнала компенсирующего действия возмущения); — Управление по отклонению или принцип обратной связи реализуется за счет главной отрицательной обратной связи и сигнала рассогласования и регулятора.

Рассмотрим следящую систему с комбинированным управлением и найдем передаточную функцию обычной системы эквивалентной по точности. W 3(S) x(s) W 1(s) W 2(S) y(s) ≡ Wэ(S)
")
Для этого приравняем их передаточные функции. (1)
 после некоторых преобразований можно получить: (2) Как видно из последнего выражения, при:")
Из (1) после некоторых преобразований можно получить: (2) Как видно из последнего выражения, при: (3) wэ(s)=∞ Условие (3) называется условием полной инвариантности.

Это означает, что ошибка рассматриваемой комбинированной следящей системы будет равна 0 в любых режимах работы поскольку:
 устойчивости и")
Достоинство принципа комбинированного управления в том, что он не изменяет (не ухудшает) устойчивости и качества переходных процессов. Однако, реализовать точно условие полной инвариантности практически невозможно.

ПРИМЕР Пусть: Найдем:
 w 1(s)")
Структурная схема такой комбинированной следящей системы имеет вид: III II I x(s) w 1(s) y(s)

Итак, чтобы точно реализовать условие полной инвариантности в нашем примере необходимо: • реализовать канал I (тахогенератор) • реализовать канал II (это 2 -ая производная от угла) • реализовать канал III (это 3 -ая производная от угла) Точно это сделать практически нельзя. Кроме того, в реальных САУ имеется множество нелинейностей, которые мы не учитывали при выводе условия полной инвариантности. Поэтому часто используют частично-инвариантные САУ, т. е. САУ не имеющие ошибок лишь в некоторых режимах.
Показатели качества сау
Количественные оценки
качества, так называемые прямые показатели
качества, определяются по кривой
переходного процесса (рис.16).
Рис.16. Переходная
функция и показатели качества
Используются следующие
прямые показатели качества:
-
величина
перерегулирования
,
![]() ;
;
характеризует
максимальное отклонение регулируемой
величины от ее установившегося значения,
которое может быть определено в
соответствии с теоремой о конечном
значении оригинала
![]() ;
;
-
время
переходного процесса или время
регулирования tp
– наименьшее значение времени, после
которого имеет место неравенство
![]() ,
,
где
— заданная величина, обычно лежащая в
пределах =0,02÷0,05;
3)
статическая ошибка сm
–
величина отклонения установившегося
значения регулируемой величины x()
от требуемого значения
N
![]()
или
![]() ,
,
гдеE(p)– изображение ошибки;
4)
время регулирования tр
– промежуток времени, по истечении
которого регулируемая величина первый
раз достигает установившегося значения.
Для определения
качества системы могут использоваться
и другие показатели, соответствующие
решаемой задаче, например, число колебаний
регулируемой величины за время
регулирования, частота и период колебаний
и т.д.
Во всех случаях
необходимо построить переходную функцию.
Коэффициенты ошибок
Точность САУ в
установившемся режиме, при относительно
медленно изменяющихся воздействиях,
может быть оценена с помощью коэффициентов
ошибок. Изображение ошибки определяется
выражением
![]() ,
,
где
![]() —
—
передаточная функция по ошибке.
Разложим передаточную
функцию системы по ошибке в степенной
ряд в окрестности точки p=0.
Отметим, что приp0,tи именно
поэтому мы говорим о точности в
установившемся режиме.
![]()
Обозначим:
![]() и получим
и получим
![]() ,
,
(8)
![]() .
.
Учитывая, что оператор
p, умноженный на
изображение самой величины, является
символом дифференцирования, можно для
оригиналов записать
![]() .
.
(9)
Выражение (9) определяет
зависимость ошибки регулирования от
различных составляющих входного
воздействия, коэффициенты Kiполучили название коэффициентов ошибок:
-
K0— коэффициент ошибки по положению;
-
K1—
коэффициент ошибки по скорости; -
K2– коэффициент ошибки по ускорению и
т.д.
Из (8) следует, что
.
Численные значения
коэффициентов ошибок определяются из
этого выражения при p0.
.
Очевидно, что К0=Ф(0).
Входное воздействие
можно представить в виде степенного
ряда
![]() ,
,
где g0– постоянная величина, характеризующая
начальное значение, g1=const – скорость
изменения входного воздействия, g2=const – ускорение и т.д.
Тогда
![]() .
.
Пусть передаточная
функция разомкнутой системы имеет вид
![]() ,
,
где - порядок астатизма системы. Для
передаточной функции замкнутой системы
по ошибке получим
![]() .
.
Изображение ошибки
запишется в виде
![]() .
.
Отсюда следует, что
если порядок астатизма больше порядка
старшей производной воздействия, т.е.
>m, то ошибка в
установившемся режиме будет равна нулю.
Если=m, то установившаяся
ошибка будет равна постоянной величине,
называемой статической ошибкой. И если<m, то при tи. В отношении
коэффициентов ошибок последнее выражение
позволяет сделать следующие выводы.
1). Если система
статическая, т.е.=0,
то существуют все составляющие ошибки
и все коэффициенты ошибок не равны нулю,
т.к.К0 = Ф(0)
0.
2).Система с астатизмом
1-го порядка,
=1, не имеет ошибки по положению иК0=0.
3).Система с астатизмом
2-го порядка,
=2, не имеет ошибок по положению и по
скорости иК0 =0,К1=0.
Этот список можно
продолжить. Таким образом, повышение
порядка астатизма повышает точность
системы в установившемся режиме. Но
повышение порядка астатизма снижает
запасы устойчивости, т.к. введение
интегрирующих звеньев увеличивает
фазовое запаздывание (снижает частоту
). Поэтому на
практике порядок астатизма выше второго
не применяют, а чаще всего ограничиваются
астатизмом первого порядка, используя
для повышения точности другие способы.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Раздел.2. Анализ динамических свойств линейной стационарной системы.
Лекция 2.1 Устойчивость линейной стационарной системы и критерии устойчивости.
Содержание
— понятие устойчивости;
— условие устойчивости и его геометрическая интерпретация;
— понятие критерия устойчивости;
— алгебраический критерий устойчивости (критерий Гурвица);
— частотный критерий устойчивости Найквиста (разомкнутая система устойчива, разомкнутая система нейтральна )
Понятие устойчивости
Понятие устойчивости имеет широкий смысл и распространяется в общем случае на любые системы, а не только на системы управления. Данное свойство распространяется как на управляемые, так и неуправляемые процессы. Например, к неуправляемым процессам можно отнести процессы небесной механики. Простым примером, поясняющим это свойство в отношении устойчивости положения (статическая устойчивость ) является механическая система «шар-поверхность». Возможные состояния устойчивости положения приведены на Рис.2.1 Положение является устойчивым, если при случайном отклонении шара, вызванном некоторым возмущением от невозмущенного положения, он, после снятия возмущения, вызвавшего это отклонение, вернется в состояние сколь – угодно близкое к невозмущенному положения.
По аналогии с устойчивостью положения,- устойчивость движения связана с понятиями невозмущенного и возмущенного движения.
Невозмущенное движение – это движение при отсутствии возмущений.
Невозмущенное движение считается устойчивым, если в результате возникновения возмущения и последующего снятия его, возмущенное движение, по истечении некоторого промежутка времени, оказывается в заданной области невозмущенного движения ( рис.2.2)
Устойчивость есть категория, относящаяся к движению системы, которое
определяется внутренними свойствами системы и ненулевыми начальными условиями, а не внешними воздействиями!
Условие устойчивости линейной системы
Устойчивость движения линейной стационарной системы управления оценивается по характеру развития собственного (свободного от воздействий) движения системы, инициированного ненулевыми начальными условиями (часто их называют — начальными возмущениями). Если система линейна, то данное движение не зависит от величины начальных отклонений переменных (в отличие от нелинейной системы) и поэтому понятие «устойчивость движения» можно заменить равноценным понятием «устойчивость системы».
Математически движение линейной стационарной системы полностью определяется решением дифференциального уравнения, которое содержит две составляющие: общее решение однородного уравнения и решение, определяемое правой частью уравнения при нулевых начальных условиях. Таким образом, именно общее решение определяет движение системы, порожденное ненулевыми начальными условиями (свободное движение) и, следовательно, определяет устойчивость системы. Вторая составляющая полного решения уравнения (частное решение) определяет вынужденное движение системы.
При оценке устойчивости линейной системы используют понятия: асимптотически устойчивая система, неустойчивая система, нейтральная система (устойчивая не асимптотически). нейтрально-устойчивая система (на границе устойчивости).
Рассмотрим эти понятия.
Система называется асимптотически устойчивой, если свободное движение со временем полностью прекращается (затухает).
Если сводное движение неограниченно развивается (либо монотонное изменение переменных, либо возрастание их амплитуды при колебательном процессе), то такая система неустойчива.
В случае нейтральной системы уравнение точно определяет затухание производной (производных) выходной переменной, а изменение самих переменных определяется начальными условиями ( система с нулевыми полюсами в передаточной функции).
Система называется нейтрально-устойчивой, если свободное движение представляет незатухающие колебания с постоянным уровнем. Такое движение соответствует нахождению системы на границе устойчивости. Заметим, что такое состояние в реальной системе длительно существовать не может, так как сколь угодно малые изменения параметров делают систему либо устойчивой, либо неустойчивой.
В том случае, если ПФ не вырождена (не сокращены нули и полюса), об устойчивости системы можно судить и по поведению весовой (и переходной) функции.
Свободное движение, при некратных корнях характеристического уравнения, полностью описывается выражением, имеющим вид:
где
корни характеристического уравнения «вход- выход»
Если известна ПФ замкнутой системы то характеристическое уравнение получается приравниваем нулю знаменателя.
Согласно решению однородного дифференциального уравнения тенденция развития свободного движения зависит только от знака действительных частей корней характеристического уравнения. Если абсолютно все корни имеют отрицательные действительные части, то все составляющие свободного движения затухают. Если, хотя бы один корень имеет положительную действительную часть, то общее решение неограниченно возрастает — система неустойчива.
Рассмотренное требование к корням характеристического уравнения и составляет содержание условия устойчивости линейной стационарной системы.
Согласно этому условию — прямым методом определения устойчивости линейной системы является — определение и оценка знаков действительных частей корней характеристического уравнения системы.
Для проверки устойчивости, часто используют геометрическую иллюстрацию в комплексной плоскости корней Рис 2.3 (широко применяется для изучения устойчивости при изменении положений корней в процессе работы системы)
На Рис.2.4 показаны примеры собственного движения для системы второго порядка, при различных корнях характеристического уравнения.
1.Согласно геометрической иллюстрации условия устойчивости — для асимптотической устойчивости системы все корни характеристического уравнения (полюсы ПФ) должны быть расположены слева от мнимой оси (должны быть «левыми»).
2.Если имеется хотя бы одна пара мнимых корней, а все остальные «левые», то система находится на границе устойчивости (нейтрально-устойчивая система),Рис.2.5.
3.Если имеется полюс в начале координат (а все остальные «левые»),то система нейтральна,Рис.2.6
Критерии устойчивости линейной стационарной системы
Критерии устойчивости — это правила, позволяющие оценить устойчивость системы без вычисления корней характеристического уравнения.
Общие критерии устойчивости движения (линейных и нелинейных систем) разработаны Ляпуновым А.М.(серия публикаций в 1892 г). Систематическое изложение теории появилось в 1935 г. в книге «Общая задача устойчивости движения».
Большое значение для развития теории устойчивости имели работы Жуковского Н.В.( статья в «Ученых записках Московского Университета» — » О прочности движения»). В теории устойчивости нелинейных систем важны работы Крылова Н.М. Боголюбова (1932 г) посвященные устойчивости продольного движения аэроплана.
В исследовании устойчивости систем управления на основе частотного метода (применение АФЧХ) основополагающими являются работы Найквиста (1932 г.) и Михайлова А.В (1936 г.).
Первое применение ЛЧХ для решения задач устойчивости следящих систем связано с именами Боде и Никольса (1949-1951 г).
Различают две группы критериев: алгебраические и частотные.
Алгебраические критерии основаны на связи коэффициентов характеристического уравнения системы с его корнями. Частотные критерии основаны на исследовании поведения частотных характеристик системы.
В основе алгебраических критериев лежат работы швейцарских математиков Рауса Е.Д (1877 г.) и Гурвица (1882 г.), посвященные поиску условий отрицательности корней характеристического уравнениями, определяющих устойчивость решения дифференциального уравнения. Поэтому с их именами связаны названия алгебраических критериев устойчивости линейной системы. Для систем регулирования небольшого порядка (не более пятого) применяется алгебраический критерий Гурвица. Критерий Рауса, в основном, используется для систем высокого порядка, его алгоритм удобен для применения ЭВМ.
Алгебраический критерий устойчивости Гурвица
В основе критерия лежит анализ диагональных определителей матрицы Гурвица.
Пусть характеристическое уравнение системы в целом приведено к виду:
Матрица Гурвица составляется из коэффициентов уравнения в последовательности:
— по диагонали матрицы записываются коэффициенты уравнения, начиная с коэффициента и кончая коэффициентом
-каждый столбец матрицы получается дополнением диагонали вверх и вниз, вверх индексы коэффициентов растут, вниз последовательно уменьшаются;
-при отсутствии в уравнении какого-либо коэффициента и вместо коэффициентов с индексами меньше нуля и больше «n» записывается ноль.
Например ,для системы четвертого порядка, получаем:
Система устойчива, если ,при положительности всех коэффициентов характеристического уравнения системы, все диагональные определители положительны.
Система является нейтрально — устойчивой, если, при положительности диагональных определителей, предпоследний определитель матрицы равен нулю (при )
Система нейтральна, если при положительности диагональных определителей, коэффициент .
Так, для характеристического полином третьего порядка:,достаточно выполнения неравенства
Критерий позволяет определить граничные значения отдельных параметров в смысле устойчивости. Так для разомкнутой следящей системы, имеющей в разомкнутом состоянии ПФ вида
Получаем характеристический полином замкнутой системы
Определим граничное значение коэффициента передачи, заменяя знак неравенства в критерии Гурвица знаком равенства:
Откуда получаем:
Для случая, когда ПФ разомкнутой системы имеет вид:
;
Получаем:
Недостатками критерия являются:
— лавинообразное нарастание громоздкости расчетов с ростом порядка уравнения;
-отсутствие гибкости и наглядности при решении задач синтеза системы, так как сложно прослеживается связь с параметрами системы;
-отсутствие непосредственной оценки близости системы к границе устойчивости.
Частотный критерий устойчивости Найквиста
В 1932 году появилась работа американского инженера Найквиста, посвященная исследованию устойчивости операционных усилителей, где применен рассматриваемый критерий устойчивости. Теоретическое обобщение данного критерия и его дополнение получено Михайловым, чему обязано его, встречающееся в литературе, название «критерий Найквиста-Михайлова».
Для решения задачи анализа Найквистом использована АФЧХ разомкнутой системы. В дальнейшем, благодаря методу ЛЧХ, получил широкое применение в инженерном проектировании систем управления.
Причинами этой популярности являются:
— простота и наглядность оценки близости системы к границе устойчивости;
— практическая полезность для анализа и синтеза динамики системы, так как параметры ЛЧХ разомкнутой системы непосредственно связаны с параметрами динамики элементов системы;
— процедура оценки устойчивости не зависит от порядка уравнения системы.
Практическое применение критерия связывают с характером свободного движения разомкнутой системы (устойчивостью разомкнутой системы). При этом рассматривают следующие варианты такой оценки :
1. Разомкнутая система устойчива
2.Разомккнтая система нейтральна и нейтрально-устойчива
3.Разомкнутая система неустойчива.
Первые два частных случая критерия имеют наибольшее практическое применение . Последний вариант, хотя и значительно реже встречается на практике, однако содержит обобщающее решение для всех случаев.
1.Критерий Найквиста в варианте — разомкнутая система устойчива
Поскольку разомкнутая система устойчива, то, следовательно, ее характеристическое уравнение содержит только «левые» корни. Если знаменатель ПФ разомкнутой системы содержит полином выше второго порядка (случай нулевых полюсов не рассматривается в этом варианте), то необходимо определить корни характеристического уравнения и убедится в том, что они «левые».
Для такого случая критерий формулируется в следующем виде:
Если разомкнутая система устойчива, то для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от нуля до бесконечности, не охватывала точку с координатами (-1,j0).Рис.2.7.
Докажем это на примере следящей системы
Пусть ПФ разомкнутой системы имеет вид:
где
полиномы аргумента «s».
характеристический полином разомкнутой системы.
Порядок характеристического полинома больше (или равен) порядку полинома числителя (что соответствует условию физически реальной системы).
Передаточная функция замкнутой системы имеет вид:
характеристический полином замкнутой системы
Рассмотрим аналитическую функцию , у которой в числителе находится характеристический полином замкнутой системы, а в знаменателе характеристический полином разомкнутой системы, имеющие одинаковый порядок. Определим изменение аргумента комплексной функции при изменении частоты от нуля до бесконечности, приняв исходное условие критерия – разомкнутая и замкнутая системы устойчивы. Условие устойчивости требует, чтобы все корни полиномов содержали отрицательные действительные части. Если корни полиномов определены, то каждый из полиномов может быть представлен в виде произведения типовых звеньев не выше второго порядка. При изменении частоты от нуля до бесконечности радиус вектор АФЧХ каждого звена поворачивается на угол равный произведению максимальной степени этого полинома на . Так как полиномы числителя и знаменателя разворачивают свои радиус –векторы в противоположных направлениях и имеют одинаковый порядок ,то суммарный угол поворота радиуса-вектора всей функции будет равен нулю. Геометрически это соответствует тому, что годограф этой функции не охватывает начало координат. Если от рассматриваемой функции перейти к функции , то выполнение полученного условия соответствует требованию «не охвата» точки с координатами .
На Рис.2.8показан вид АФЧХ разомкнутой системы, при котором замкнутая система устойчива.
ЛАЧХ этой системы приведены на Рис.2.9. Они показывают, что, для устойчивости необходимо, чтобы в окрестности частоты среза (диапазон средних частот) частот фазовая характеристика должна располагаться выше уровня -180 градусов, то есть — ФЧХ разомкнутой системы ,при возрастании частоты, должна пересечь единичную окружность (частота в точке пересечения равна частоте среза) раньше, чем достигнет уровня -180 градусов.
Очевидно, граничным состоянием устойчивости системы , в этом случае, будет пересечение ЛАХW оси частот в точке, где ФЧХ пересекает уровень -180 градусов. При этом значение АЧХ замкнутой системы при такой частоте среза равно бесконечности.
Это указывает на появление в составе ПФ замкнутой системы консервативного звена (появление двух мнимых корней знаменателя ) то есть система становится нейтрально-устойчивой. Степень близости годографа к рассмотренному состоянию связывают с понятием – запас устойчивости.
В отношении чувствительности к возможной потери устойчивости системы к изменению коэффициента передачи разомкнутой системы различают понятия: абсолютно устойчивая система, условно-устойчивая система( понятие абсолютно устойчивой линейной системы не следует путать с аналогичным названием для оценки устойчивости нелинейной системы при больших начальных отклонениях). Иллюстрация данных понятий приведена на Рис.2.10 и Рис.2.11.
Как видно, абсолютно-устойчивая система устойчива при любых отклонениях коэффициента передачи (кроме значения равного бесконечности, при котором она находится на границе устойчивости).
Условно-устойчивая система устойчива только при значениях коэффициента передачи заключенных в некотором диапазоне. Для устойчивости такой системы ФЧХ разомкнутой системы не заходить за уровень -в диапазоне средних частот ЛАХ разомкнутой системы.
Критерий устойчивости Найквиста — разомкнутая система нейтральна
Разомкнутая система нейтральна
Если разомкнутая система нейтральна, то ПФ разомкнутой системы в этом случае содержит некоторое количество нулевых полюсов, а все остальные полюса являются «левыми». В АФЧХ такой системы возникает разрыв на нулевой частоте. Признаком такой системы является наличие интегрирующих звеньев в составе ПФ разомкнутой системы.
В этом случае критерий устойчивости формулируется так:
Для устойчивости замкнутой системы необходимо и достаточно, чтобы АФЧХ разомкнутой системы, при изменении частоты от нуля до бесконечности, дополненная на участке разрыва дугой бесконечно-большого радиуса, не охватывала точку с координатами (-1,j0). Дополнение дугой бесконечно-большого радиуса осуществляется по часовой стрелке от направления положительной вещественной полуоси на угол, определяемый произведением 90 градусов на число нулевых полюсов разомкнутой системы.
Для примера, рассмотрим наиболее типичный случай реальной системы с одним нулевым полюсом. АФЧХ разомкнутой системы приведена на Рис.2.12 Соответствующие ей ЛАЧХ и ФЧХ показаны на Рис.2.13 На Рис.2.14 и Рис.2.15 показаны примеры устойчивой замкнутой системы при наличии двух и трех нулевых полюсов в ПФ разомкнутой системы.
Лекция 2.2 Критерий устойчивости Найквиста (разомкнутая система нейтрально-устойчива, разомкнутая система неустойчива)
Содержание
— разомкнутая система нейтрально-устойчива;
-разомкнутая система неустойчива;
— правило переходов;
— обобщение критерия
Рассмотрим случай нейтрально-устойчивой разомкнутой системы. Такая система соответствует разомкнутой системе, содержащей мнимые полюсы ( консервативные звенья в составе ПФ разомкнутой системы).
Пусть ПФ разомкнутой системы содержит пару мнимых полюсов.
АФЧХ такой разомкнутой системы имеет разрыв, так как включает консервативное звено. Для использования критерия в известном виде, необходимо ликвидировать разрыв годографа, замкнув его дугой бесконечно-большого радиуса в направлении возрастания частоты.
На Рис.2.16 показан пример (АФЧХ и ЛЧХ) для следящей системы с ПФ разомкнутой системы в виде:
Годограф имеет два дополнения дугой бесконечно – большого радиуса. Последняя дуга охватывает критическую точку. Замкнутая система неустойчива.
На Рис.2.17 показан случай при ПФ вида
Вторая дуга не охватывает критическую точку, замкнутая система устойчива.
На Рис.2.18 показаны ЛАХ и АЧХ устойчивой системы с ПФ вида:
Разомкнутая система неустойчива
Рассмотрим наиболее неблагоприятный случай, когда разомкнутая система неустойчива (характеристическое уравнение разомкнутой системы имеет правые полюса).
Практически такая ситуация возникает при наличии в системе внутренних неустойчивых контуров. Заметим, что при проектировании системы разработчик в большинстве случаев (в интересах отладки системы) стремится реализовать внутренние контуры с достаточной гарантией устойчивости. Однако, такие контуры могут возникнуть в процессе эксплуатации системы при изменении параметров, причем заранее учесть эти изменения сложно (например, изменение характера аэродинамической нагрузки на рулевые поверхности ЛА, смещение центра давления ЛА относительно центра масс при увеличении скорости за пределами скорости звука ).
Для применения критерия Найквиста необходимо заранее определить количество «правых» полюсов ПФ разомкнутого контура. Если ПФ разомкнутого контура представляет произведение ПФ звеньев не выше второго порядка, то количество «правых » полюсов равно суммарному порядку всех неминимально-фазовых звеньев (полиномы их ПФ содержат отрицательные коэффициенты). В общем случае необходимо найти корни характеристического уравнения разомкнутого контура и подсчитать сумму тех из них, которые содержат положительные действительные части.
Математическое решение базируется на « принципе аргумента» теории функций комплексного переменного.
Согласно данному принципу, изменение аргумента комплексной функции, представленной в виде полинома степени «n» при наличии у него «r» корней в правой полуплоскости при изменении частоты от 0 до равно
=
(каждый правый корень полинома звено смещает ФЧХ на -180 градусов- см. ЧХ не минимально-фазового звена)
Рассмотрим ПФ вида
В ее числителе расположен характеристический полином замкнутой системы, а в знаменателе характеристический полином разомкнутой системы, имеющий «правых» корней. Если допустить, что замкнутая система устойчива ( отсутствие «правых корней» в числителе) данного выражения то общее изменение аргумента функции равно разности аргументов числителя и знаменателя:
=
Поворот радиуса-вектора данной функции происходит в положительном направлении (против часовой стрелки).
Количество оборотов вектора (р) ,равно :
При смещении функции по действительной оси на -1 (переход к функции ) начало координат радиуса-вектора перемещается в критическую точку .
Обобщение полученных результатов приводит к следующему правилу (критерию):
Если разомкнутая система неустойчива и ее ПФ содержит «r» правых полюсов, то для устойчивости замкнутой системы необходимо и достаточно, чтобы при изменении частоты от нуля до бесконечности, радиус – вектор АФЧХ разомкнутой системы, с центром в точке с координатами (-1,j0), совершил «r/2» оборотов вокруг этой точки в положительном направлении ( против часовой стрелки). В частном случае, если разомкнутая система устойчива –количество таких оборотов равно нулю, то есть годограф не охватывает критическую точку.
Правило переходов
Для анализа сложных годографов непосредственный подсчет оборотов вектора представляет затруднения и может привести к ошибкам. Практическое решение для применения критерия, удобно свести к подсчету точек пересечения годографа вещественной оси на интервале частот от -1 до -.
Под «переходом» понимается факт пересечения годографом (АФЧХ) отрезка действительной оси на интервале значений от -1 до -. Факт пересечения конкретизирован числом. Если годограф, с ростом частоты, пересекает данный отрезок сверху вниз (движение в область меньшего фазового сдвига), то ему присваивается число +1.Если — в обратную сторону, то -1. Если годограф начинается (даже в бесконечности) с фазового угла -180 градусов и с ростом частоты «фазовое отставание» растет, то -1/2, если уменьшается, то +1/2.
Иллюстрация приведена на Рис.2.19 .
При таком подходе количество оборотов рассматриваемого вектора в положительном направлении относительно критической точки равно алгебраической сумме переходов.
Согласно правилу переходов критерий можно переформулировать в виде :
Замкнутая система устойчива, если алгебраическая сумма переходов равна «r/2»,где «r» — число правых полюсов разомкнутого контура.
На Рис. 2.20 приведены ЛЧХ разомкнутой системы с ПФ вида:
W(s)=
Разомкнутая система неустойчива. ПФ содержит один правый полюс. Начальное значение ФЧХ -180 градусов. Разрыв годографа отсутствует. Сумма переходов считается на одном уровне (-180 градусов) и равна +1/2,что соответствует устойчивой замкнутой системе.
При наличии разрывов годографа, вызванных наличием нулевых полюсов в ПФ неустойчивой разомкнутой системы, разрывы ликвидируются с помощью дуги бесконечно большого радиуса.
Существенно, что отсчет дуги бесконечно большого радиуса осуществляется от верхнего ближайшего к начальному значению ФЧХ уровня нечетно- кратного -180 градусам (-180,-540,-900 и т.д). Переходы фиксируются на всех пересекаемых уровнях нечетно-кратных значению -180 градусов.
При использовании ЛЧХ фиксация переходов происходит на отрезке частот, где ЛАХ лежит выше оси частот, в точках пересечения ФЧХ (с учетом ее дополнения при наличии разрывов) уровней нечетно-кратным -180 градусам
На Рис.2.21 приведены ЛЧХ разомкнутой системы с ПФ вида:
Разомкнутая система неустойчива. Имеет один правый и один нулевой полюс. Начальное значение ФЧХ -270 градусов. Согласно правилу переходов , дополнение ФЧХ на участке разрыва проводится от (нечетно-кратного) ближайшего уровня равного — 180 градусов. С учетом дополнения дугой бесконечно –большого радиуса переходы фиксируются на двух уровнях и их алгебраическая сумма равна (-1/2+1)= 1/2, что соответствует устойчивой замкнутой системе.
Данной ПФ соответствует годограф, показанный на Рис.2.22
Рассмотрим более сложный пример (Рис.2.23). Разомкнутая система имеет три правых полюса, три левых полюса и один нулевой.
Начало ФЧХ на уровне -630 градусов (-90- 180 -360=-630). Предельное значение ФЧХ при (-90 -90-180)=-360 градусов.
На интервале подсчета переходов (ЛАХ выше оси частот) имеем :
2 положительных перехода (на уровнях -540 градусов и -180 градусов) и половина отрицательного перехода (от дуги бесконечно большого радиуса, берущей начало с уровня -540 градусов и имеющей продолжение до уровня -630 градусов). Разомкнутая система имеет три правых полюса. Условие устойчивости выполняется :
Обобщение критерия Найквиста
Правило переходов является справедливым и при отсутствии правых полюсов, что дает возможность применять его для рассмотренных выше вариантов (разомкнутая система устойчива, разомкнутая система нейтральна и нейтрально-устойчива). Согласно этому правилу критерий формулируется следующим образом:
Если разомкнутая система устойчива, то для устойчивости замкнутой необходимо и достаточно, чтобы сумма переходов равнялась нулю.
При наличии нулевых полюсов в ПФ разомкнутой системы, разрывы АФЧХ при нулевой частоте ликвидируются с помощью дуги бесконечно-большого радиуса, проводимой (согласно частному случаю 2) — от положительного направления действительной оси по часовой стрелке на число квадрантов, равное числу нулевых полюсов.
В этих вариантах критерия переходы подсчитываются на одном уровне ФЧХ, равном -180 градусов и в тех диапазонах частот, где ЛАХ лежит выше оси частот.
На Рис.2.24 показаны ЛАХ и АФЧХ характеристики разомкнутой условно-устойчивой системы, имеющей нулевой полюс. Дополнение дугой радиуса равного бесконечности дает сумму переходов равную нулю. Система с такой характеристикой устойчива. Это подтверждается формулировкой критерия для второго варианта.
На Рис.2.25 показаны характеристики устойчивой разомкнутой системы, содержащей слабодемпфированное звено. Система неустойчива.
На Рис.2.26 показаны характеристики разомкнутой системы, содержащей три нулевые полюса. Дополнение дугой радиуса равного бесконечности приводит к появлению еще одного перехода противоположного знака . Система устойчива.
Лекция 2.3. Запас устойчивости линейной системы и его показатели
Содержание:
— понятие запаса устойчивости;
-оценки запаса устойчивости в виде запаса по фазе и модулю;
— показатель колебательности и запретная область для АФЧХ разомкнутой системы
Понятие запаса устойчивости
Появление данного понятия вызвано следующими причинами:
— во первых при разработке систем управления вопрос об устойчивости системы имеет практическое значение только при существовании необходимой гарантии ее сохранения в процессе эксплуатации этой системы;
— вторых — близость системы к границе устойчивости, тесно связана с качеством переходного процесса, к которому непосредственно или косвенно предъявляются определенные требования при разработке системы управления.
В соответствии с частотным критерием Найквиста удовлетворить данным требованиям позволяет выбор границ окрестности точки с координатами (-1,j0),в которую годограф (АФЧХ)_ разомкнутой системы не должен заходить (то есть она является запретной для АФЧХ). Именно такую запретную область и связывают с понятием — запас устойчивости.
Границы этой области определяют с помощью различных показателей.
В частности, такими показателями являются запасы по фазе и модулю (амплитуде)
Запасы устойчивости по фазе определяется величинами углов, отсчитываемых от отрицательного направления действительной оси комплексной плоскости АФЧХ, до направлений радиусов-векторов, проходящих через ближайшие, относительно критической точки, точки пересечения АФЧХ с единичной окружностью. Запас по фазе обозначается символом -«».
Запасы по модулю определяется длинами отрезков действительной оси от точки с координатами -1,j0 до ближайших точек пересечения АФЧХ действительной оси. Запас по модулю обозначается символом — «»
При использовании ЛЧХ оценка запаса по модулю » » заменяется на оценку «». Эту величину часто называют запасом по амплитуде.
На Рис.2.27 изображена АФЧХ такой системы, в которой для оценки запаса устойчивости достаточно двух показателей – одного значениями запаса по фазе и одного значением запаса по модулю. Соответствующие ей ЛЧХ приведены на Рис.2.28.
В практике разработок следящих систем приемлемыми считаются запасы устойчивости, оцениваемые значениями показателей :
— запасы по фазе — от 30 до 60 градусов;
— запасы по амплитуде ( )-от -6 до-20 дБ.
Рассмотрим более сложный случай.
На Рис.2.29 приведена АФЧХ разомкнутой условно -устойчивой системы, содержащей прямой цепи слабо-демпфированное колебательное звено. На рис.2.30 изображены, соответствующие ей ЛЧХ. В этом случае, согласно определениям, для определения запаса устойчивости уже необходимы два значения запаса по фазе и два значения запаса по модулю.
Рассмотренные выше показатели запаса устойчивости применяются в основном при анализе динамике системы.
Показатель колебательности и запретная область для АФЧХ разомкнутой системы
Как показано выше, при усложнении вида АФЧХ увеличивается количество показателей запаса устойчивости и возникают трудности при проектировании таких систем. Исправить этот недостаток позволяет переход к определению запаса устойчивости с помощью такого показателя, который одним своим значением позволяет определить полную границу запретной области для АФЧХ разомкнутой системы.
Такой показатель запаса устойчивости носит название — показатель колебательности.
Показатель колебательности обозначается символом «M».
Показатель колебательности определяется по АЧХ замкнутой системы (приведенной к структуре следящей системы) и равен максимальному значению этой характеристики. Рис.2.31. Такая оценка запаса устойчивости удобна при экспериментальном определении АЧХ замкнутой системы. При использовании ЛАХ (Рис.2.32) она определяется выражением:
М=
где
а — максимальное значение ЛАХ замкнутой системы в децибеллах.
При М=1, переходная функция имеет характер близкий к апериодическому.
Таким образом, значение характеризует колебательные свойства системы. Переходная функция системы, у которой показатель колебательности больше единицы имеет вид Рис.2.33.
Между величиной перерегулирования переходного процесса (область времени) и показателем колебательности (область часоты) существует взаимно-однозначное соответствие, которое оценивается приближенными соотношениями:
М=1.1-1.2
М=1.3-1.5 30-40%
М=1.7-2 50%-55%
Рассмотрим связь показателя колебательности с границей запретной области для АФЧХ разомкнутой системы. Выявление такой связи представляет интерес для проектирования системы.
Выполним следующие построения:
-изобразим АЧХ замкнутой системы;
-проведем прямую параллельную оси частот проходящую через экстремум функции.
Используем следующий методический прием. Будем рассматривать данную прямую в качестве характеристики некоторой гипотетической замкнутой системы, имеющей бесконечную полосу и нулевой сдвиг по фазе Рис.2.34. Приняв данную гипотезу, построим АФЧХ, соответствующей ей разомкнутой системе.
Для этого используем формулу связи частотных характеристик разомкнутой и замкнутой следящей системы:
Для замкнутой системы с постоянным значением модуля справедливо выражение:
М= =
Возведение в квадрат левой и правой части этого выражения дает уравнение:
Дальнейшее преобразование приводит к алгебраическим уравнениям:
Откуда, окончательно, получаем:
После введения обозначений,:
С= ; R = ,
поолучаем уравнение, смещенной по вещественной оси комплексной плоскости, окружности:
Параметр смещения окружности и величина ее радиуса зависит от значения постоянной М, Рис.2.35.
В координатах АФЧХ разомкнутой системы, данная окружность разделяет две области возможных значений, соответствующих на графике АЧХ замкнутой системы областям, лежащим выше прямой Ми ниже ее. Внешняя область от окружности соответствует значениям меньшим М,а внутренняя область значениям большим М
С уменьшением уровня Мвнутренняя область увеличивается и величина смещения центра окружности растет. В пределе, при М=1, окружность вырождается в прямую линию, параллельную мнимой оси.
Так как уровень М= М, равен максимальному значения АЧХ замкнутой реальной системы (ее показателю колебательности), то он имеет одну общую точку с реальной характеристикой замкнутой системы. Тогда соответствующая окружность в координатах АФЧХ разомкнутой системы, будет иметь также одну общую точку с АФЧХ реальной разомкнутой системы. Если АФЧХ реальной системы зайдет во внутреннюю область рассматриваемой окружности, то ей будет соответствовать больший показатель колебательности (окружность с меньшим радиусом).
Следовательно, если показатель колебательности задан, то АФЧХ проектируемой разомкнутой системы не должна заходить во внутреннюю область, ограниченную данной окружностью (Рис.2.36).
Желаемое положение АФЧХ разомкнутой системы, с требуемым показателем колебательности, определяется условием касания ее с соответствующей окружностью.
Таким образом, значение показателя колебательности однозначно определяет запретную для АФЧХ разомкнутой системы область в окрестности критической точки (-1,j0), характеризуя ее запас устойчивости в целом. Это позволяет применять показатель колебательности для формирования требования к характеристикам системе в более удобном виде , чем при использовании показателей в виде запасов устойчивости по фазе и модулю.
Для проектирования системы при формировании желаемой ЛАХ разомкнутой системы , полученная запретная область для АФЧХ, преобразуется в соответствующие запретные области для ее ЛАХ и ФЧХ.
Рассмотрим движение изображающей точки по окружности (Рис.2.37) от значения , соответствующего модулю радиуса-вектора
и аргументу равному -180 градусов, до частоты ,дающей значение модуля равное
С — R = ,
при таком же аргументе.
Согласно (Рис.2.37), на основании теоремы косинусов, получаем:
Откуда следует:
Учитывая, что
Окончательно получаем:
Данное выражение связывает нелинейной зависимостью фазовый угол и модуль границы запретной области при заданном значении параметра С, который определяется показателем колебательности. Полученная аналитическая связь между переменными запретной области в логарифмических координатах изображается на ЛЧХ и имеет вид, показанный на Рис.3.4. Единичная окружность пересекает границу запретной области на частоте , окрестность которой соответствует диапазону средних частот ЛАХ разомкнутой системы. Поэтому именно в диапазоне средних частот ЛАХ и будут располагать границы трансформированной запретной области на ЛЧХ (Рис.2.38).
Рис.2.38 показывает, что вид АЧХ запретной области близок к виду АЧХ апериодического звена, поэтому запретная область для асимптотической ЛАХ в области частоты среза разомкнутой системы близка к наклону асимптоты -1. Это позволяет принять решение, утверждающее что в области средних частот (желаемая ) асимптотическая ЛАХ разомкнутой системы должна иметь наклон не более -1. В некоторых системах (с повышенными требованиями к точности) допускается наклон равный нулю.
Границы данной асимптоты корректируются в зависимости от наклонов асимптот ЛАХ разомкнутой системы слева и справа от диапазона средних частот параметры границ данной асимптоты и их расположение относительно частоты среза – могут различаться.
Так, если ближайшие асимптоты (слева и справа) имеют одинаковые наклоны -2 (Рис.2.39), то наиболее точное приближение к границам запретной области обеспечивается при расположении частоты среза желаемой ЛАХ посередине указанной асимптоты.
В этом случае длина среднечастотной асимптоты желаемой ЛАХ разомкнутой системы равна значению , где :
h = — отношение граничных частот асимптоты в окрестности частоты среза.
lg h- значение этого длины среднечастотной асимптоты.
В том случае, если ближайшая слева асимптота имеет наклон -3,а ближайшая справа -2, (условно-устойчивая система) (Рис.2.40 ), то длина участка с наклоном -1,определяется соотношением:
h = ,
а низкочастотная граница среднечастотной асимптоты с наклоном -1 расположена относительно частоты среза на расстоянии (в долях декады) от частоты среза.
Полученные соотношения используются для построения желаемой ЛАХ разомкнутой системы по требованию к запасу устойчивости, заданному в виде показателя колебательности (М), после того как определена частота среза разомкнутой системы и выбран тип ЛАХ по соображениям динамической точности .
Лекция 2.4 Динамическая точность линейной системы при детерминированных (неслучайных) воздействиях
Содержание:
— рассматриваемое понятие динамической точности следящей системы;
— математическое описание динамической ошибки следящей системы относительно входного (полезного) воздействия с помощью передаточной функции и дифференциального уравнения;
— динамическая ошибка , вызванная возмущением на выходе (входная помеха);
— динамическая ошибка , вызванная возмущением на выходе;
— динамическая ошибка на входе силовой части системы;
— динамическая ошибка, вызванная возмущением на выходе датчика дополнительной обратной связи;
-применение метода ЛЧХ для исследования динамической точности
Понятие динамической точности следящей системы
Под динамической точностью следящей системы понимается разность между входной переменной и выходной переменной системы, определенная для каждого момента времени процесса регулирования. В следящей системе данная разность переменных системы является первичным сигналом управления и называется динамической ошибкой следящей системы.
Математическое моделирование динамической ошибки следящей системы относительно входного (полезного) воздействия с помощью передаточной функции и дифференциального уравнения
Рассмотрим изображение по Лапласу динамической ошибки системы, вызванной входным воздействием.
Согласно схеме Рис.2.41, изображение динамической ошибки равно:
Здесь
= -передаточная функция ошибки системы относительно входного воздействия.
Если ПФ разомкнутой системы, в общем случае, имеет вид:
где
М(s) и D(s) -полиномы,
то
Здесь — N(s) — характеристический полином замкнутой системы.
Преобразуем, полученное выражение к виду:
Данное выражение ( после применения обратного преобразования Лапласа) приводит к дифференциальное уравнению, связывающему ошибку системы и ее производные с воздействием и его производными. Его называют дифференциальным уравнением ошибки следящей системы. Левая часть этого уравнения характеризует свободное движение системы ( ПФ ошибки и ПФ «вход-выход» имеют одинаковый характеристический полином). Полное решение дифференциального уравнения ошибки определяет процесс изменения динамической ошибки системы, характеризуя ее динамическую точность.
При нулевых начальных условиях динамическая ошибка системы, при неслучайном воздействии, описывается частным решение этого дифференциального уравнения. Такую ошибку называют вынужденной динамической ошибкой.
Если система устойчива, то вынужденная динамическая ошибка содержит, затухающую со временем, переходную составляющую динамической ошибки и установившуюся составляющую ошибки, которая существует до тех пор, пока существует воздействие.
Иллюстрация приведена на Рис.2.42
Если начальные условия ненулевые, то присутствует еще одна составляющая динамической ошибки — свободная (собственная)составляющая ошибки.
Таким образом, при ненулевых начальных условиях, динамическая ошибка определяется суммой:
Получение передаточных функций динамической ошибки относительно внешних возмущающих воздействий
Помимо входного( полезного) воздействия на систему действуют возмущения.. Поскольку динамическая ошибка является реакцией линейной системы на воздействия то, в соответствии с принципом суперпозиции, может быть получена, как сумма отдельных составляющих, каждая из которых связана с конкретным воздействием.
Например, согласно структурной схеме Рис.2.43, в соответствии с принципом суперпозиции, справедливым для линейной системы, можно записать выражение для изображения полной вынужденной ошибки системы:
В качестве примера, рассмотрим следящую систему с тремя воздействиями Рис.2.44. Используем принцип суперпозиции.
Динамическая ошибка, вызванная возмущением на входе системы
В ряде систем (РЛС, САС с опико-электронным пеленгатором цели) физической причиной такого возмущения является ложный сигнал, содержащийся в информации о входном воздействии. В следящих рулевых приводах это сигнал помехи на выходе датчика обратной связи. Если этот сигнал является независимым от полезного воздействия (аддитивная помеха), то реальная структура системы представляется в виде, показанном на. Рис.2.45. В исходной структуре ошибка системы не представлена как отдельная переменная. Преобразуем структурную схему Рис.2.45 к виду, в котором она определена. Рассмотрим сигнал на входе силовой части в исходной структурной схеме:
Преобразованная структурная схема показана на Рис.2.46.. Приведем полученную схему к виду, в котором динамическая ошибка является выходной переменной. Рис.2.47
Используя формулу замыкания контура, получаем:
ПФ показывает — входная помеха преобразуется в ошибку системы так же, как и полезное входное воздействие — в выходную координату системы.
Поэтому стремление улучшить воспроизведение входного (полезного) воздействия одновременно увеличивает динамическую ошибку от рассматриваемого возмущения. Такая ситуация иллюстрирована на Рис.2.48. Он показывает, что увеличение полосы пропускания системы , дающее повышение качества отработки входного полезного воздействия приводит к возрастанию ошибки от возмущения на входе системы. Существующий минимум суммарной ошибки ограничивает динамическую точность такой системы.
Динамическая ошибка, вызванная возмущением на выходе
Проведем преобразование структурной схемы к причинно-следственному виду Рис.2.49 и определим ПФ замкнутого контура. Получаем:
Данное возмущение преобразуется в динамическую ошибку системы той же ПФ (отличается только знак), что и входное (полезное) воздействие.
Если данные воздействия имеют разные спектры (разную динамику), то меры, направленные на уменьшение динамической ошибки системы относительно этих двух воздействий, должны быть обязательно согласованы, так как затрагивают реализацию одной и той же передаточной функции, а следовательно и , соответствующую ей ЛЧХ, разомкнутой системы и предъявляют к ней свои (независимые) требования в различных диапазонах частот. Следовательно, при реализации такой характеристики необходимо учитывать одновременное проявление нескольких противоречивых факторов, а именно :
-различные требования к величине допустимых составляющих динамической ошибки для каждого из воздействий;
-различную динамику (диапазон спектра и его интенсивность):
— требование желаемого запаса устойчивости.
В условиях одноконтурной структуры следящей системы такое компромиссное решение, особенно, при повышенных требовании к динамической точности системы, может оказаться неразрешимым .
Суммируя составляющие вынужденной динамической ошибки системы от рассмотренных воздействий, получаем выражение для изображения полной динамической ошибки системы:
Данное выражение является основой для определения как переходной, так и установившейся составляющих вынужденной динамической ошибки системы в одноконтурной следящей системе.
Динамическая ошибка на входе силовой части системы
На рис.2.50 показана схема с возмущением на входе силовой части системы (например, сигнал неслучайной помехи на выходе предварительного усилителя в управляющей части системы для следящих приводов, внешний возмущающий аэродинамический момент для ЛА)
Для определения ПФ ошибки от данного возмущения исходную структурную схему удобно преобразовать к эквивалентной схеме, в которой воздействие приведено к координате ошибки. Используя выше полученное выражение (для входной помехи) , получаем:
Выражение показывает, что чем больше модуль («область усиления» данного звена) , тем меньше ошибка от данного возмущения.
Отсюда следует , «усиление» сигналов в структуре системы, по возможности, следует распределять, так, чтобы между возмущением действующим (или приведенным) в прямой цепи и реальным измерителем ошибки (дискриминатором ошибки) было максимально-возможным.
Применение метода ЛЧХ для исследования динамической точности
Содержание
-ограничения на ЛАЧХ динамической ошибки, вызванные требованиями точности и запаса устойчивости;
— типовые желаемые характеристики разомкнутой системы при учете требования точности системы;
Рассмотрим ошибку следящей системы, вызванную входным воздействием, имеющим вид гармонической функции.
Согласно особому свойству линейной стационарной системы, динамическая ошибка такой системы на гармоническое воздействие, является гармонической функцией той же частоты.
При анализе динамической ошибки при таком воздействии интерес представляет ее максимальное значение — амплитуда. Поэтому для определения динамической ошибки достаточно использовать только амплитудно-частотные характеристики (ЛАХ).
Получим ЛАХ ошибки от входного (полезного) воздействия.
Пусть, в качестве примера, ПФ разомкнутой системы имеет вид:
Построим ЛАХ разомкнутой системы и рассмотрим ее связь с ЛАХ ошибки от входного воздействия Рис.2.51
Проведем две прямые параллельные оси частот на уровне +20дБ/дк и -20дБ/дк. Пересечение верхней прямой с ЛАХ определяет тот диапазон частот единичной отрицательной обратной связи, в котором она является глубокой (низко- частотный диапазон частот). В этом диапазоне частот система воспроизводит входное воздействие.
Пересечение нижней прямой с ЛАХ определяет диапазон частот, в котором характеристики замкнутой системы близки к характеристикам разомкнутой системы , эффект обратной связи здесь не проявляется (высоко-частотный диапазон частот).
Область частот расположенная между ближайшими пределами, указанных диапазонов, относится к среднему диапазону частот разомкнутой системы (поведение ЛАХ в этом диапазоне связано с величиной запаса устойчивости системы и, следовательно, с качеством переходного процесса)
Учитывая ранее полученное выражение для ПФ ошибки относительно входного управляющего воздействия, получаем:
В области низких частот и поэтому, согласно свойству глубокой отрицательной обратной связи, справедливо приближенное равенство:
Выражение показывает, что в этом диапазоне частот ЛАХ ошибки является зеркальным отображением ЛАХ разомкнутой системы, как показано на Рис.2.51.
Поскольку каждая ордината ЛАХ ошибки представляет отношение амплитуды ошибки к амплитуде воздействия, то очевидно, чем ниже лежит ЛАХ ошибки , тем меньше амплитуда динамической ошибки, тем выше точность системы.
По причине осевой симметрии характеристик ошибки и разомкнутой системы справедливо утверждение — чем больше область, заключенная между осью частот и ЛАХ разомкнутой системы, тем меньше амплитуда ошибки..
Назовем данную область (заштрихована) «областью усиления» контура единичной обратной связи .
Следовательно, для уменьшения динамической ошибки от рассматриваемого воздействия следует стремиться к увеличению «области усиления» контура в диапазоне частот входного воздействия.
В диапазоне высоких частот справедливо приближенное равенство:
.
Следовательно, ошибка системы приближенно равна воздействию, обратная связь не контролирует изменение выходной переменной.
В области средних частот, являющейся переходной между рассмотренными выше характеристиками, для точного построения ЛАХ ошибки следует воспользоваться «формулой замыкания» . Для этого ПФ ошибки преобразуется к виду:
Суммируя ЛАХ замкнутой следящей системы с ЛАХ, соответствующий ПФ
При гармоническом воздействии амплитуда ошибки определяется умножением амплитуды воздействия на значение ординаты АЧХ ошибки на частоте воздействия.
Если используется ЛАХ ошибки, то предварительно следует перейти от значений ординаты ( в децибелах) к относительной безразмерной величине:
где
а — значение ординаты ЛАХ ошибки на частоте воздействия в дБ.
Ограничения на ЛАЧХ ошибки следящей системы , вызванные требованиями точности и запаса устойчивости
Полученные результаты показывают, что характеристики динамической точности противоречиво связаны с характеристиками переходного движения системы.
Так, например, если попытаться увеличить «область усиления» контура наиболее простым способом — увеличением коэффициента передачи разомкнутой системы, то это приводит к уменьшению запаса устойчивости системы , и как следствие к увеличению перерегулирования и времени затухания переходного процесса.
Cохранить запас устойчивости, при увеличении точности, возможно за счет соответствующего уменьшения всех постоянных времени ПФ, сохраняя взаимное расположение сопрягающих частот ЛАХ разомкнутой системы. Однако, такое решение ограничено следующими реальными факторами:
1. Существенно возрастают требования к быстродействию элементов неизменяемой системы, в связи с чем, усложняется технология их изготовления и повышается стоимость;
2. При наличии входной помехи и помехи в канале обратной связи ,с увеличением полосы пропускания системы возрастает динамическая ошибка, вызванная данными возмущениями.
Поэтому, такой способ повышения динамической точности (при сохранении типа желаемой ЛАХ) значительно ограничен.
3. Конфликтная ситуация может разрешится при изменении конфигурации желаемой ЛАХ разомкнутой системы, и причем так, чтобы удовлетворялись требования к динамической точности в установившемся движении и к запасу устойчивости системы при минимально-возможной частоте среза (полосе пропускания)
В том случае, если эти требования к системе заданы и воздействия определены, то возникает задача формирования вида и параметров такой желаемой ЛАХ разомкнутой системы, при которой данные требования обеспечиваются наиболее доступными техническими средствами, то есть с учетом требования наибольшей простоты реализации. Именно такое требование и связывают с понятием минимально-возможной частотой среза ЛАХ разомкнутого контура. Формирование такой характеристики системы можно рассматривать как задачу расчета желаемого объединенного критерия качества линейной следящей системы в частотной области.
Типовые желаемые характеристики разомкнутой системы
Для удобства проектирования системы выделяют типовые ЛАХ, ориентированные на системы различного класса.
Так для систем невысокой точности относительно входного воздействия, с высоким требованием к показателям переходного процесса, применяют ЛАХ с одной низкочастотной асимптотой, имеющей наклон равный -1 (например, рулевые приводы, активные и пассивные координаторы целей БПЛА, системы управления ЛА).
Для систем средней точности (системы наведения ППУ, автоматические визиры прицельных систем) низкочастотные асимптоты желаемая ЛАХ разомкнутой системы содержит две основные асимптоты (первая с наклоном -1,вторая с наклоном-2)
Для систем повышенной точности наклоны первой и второй асимптоты возрастают.
Типовые ЛАХ принято обозначать по наклону низкочастотных асимптот в направлении увеличения частоты (например,1.1.1 – желаемая ЛАХ первого типа,1.2.1 – желаемая второго типа, 1.3.1 желаемая ЛАХ третьего типа и т.д.). Варианты характеристик показаны на Рис.2.52
Лекция 2.5. Динамическая точность в установившемся движении при воздействиях, имеющих постоянных производных. Статические и астатические системы.
Содержание :
— понятие астатизма и порядка астатизма ;
-аналитические признаки порядка астатизма;
— оценка порядка астатизма с помощью теоремы о конечном значении;
— возможности повышения порядка астатизма относительно основных воздействий.
Понятие астатизма и порядка астатизма
Рассматривается только установившаяся динамическая ошибка следящей систем в таких режимах движения, в которых входное воздействие представлено своей отдельной постоянной производной
Так для следящей системы регулирующей механическое движение рассматриваются :
— ошибка установившегося положения после отработки заданного положения (так называемый режим позиционирования) ;
— установившаяся ошибка вызванная воздействием, изменяющимся с постоянной скоростью ( постоянное значении первой производной воздействия);
— установившаяся ошибка вызванная воздействием, изменяющимся с постоянным ускорением ( постоянное значение второй производной воздействия)
— и т.д
При таких частных режимах работы установившаяся динамическая ошибка следящей системы, может быть равной нулю. Следует подчеркнуть, что такое явление возможно только в процессе установившегося движения. Переходная вынужденная ошибка следящей системы всегда отлична от нуля.
Указанная возможность отсутствия установившейся динамической ошибки системы в рассматриваемых частных режимах движения характеризуют следующими понятиями: статическая система, система с астатизмом первого порядка, система с астатизмом второго порядка и т.д..
Статической называют систему, в которой существует постоянная установившаяся ошибка, вызванная постоянным значением собственно воздействия.
Например, в системе, замкнутой по положению — это — постоянная установившаяся ошибка вызванная отработкой постоянного значения этого положения (ошибка в режиме позиционирования) Рис.2.53 а.
Характерными примерами таких систем являются следящие рулевые приводы при наличии аэродинамической нагрузки; системы регулирования нормальной перегрузки; системы автоматического сопровождения при наличии упругой связи между управляемой платформой и основанием системы.
В том случае, если входное воздействие изменяется с постоянной скоростью и установившаяся динамическая ошибка постоянна, а ошибка, вызванная постоянным значением самого воздействия равна нулю — то такую систему называют астатической системой первого порядка ( система с астатизмом первого порядка ) Рис.2.53б
В том случае, если система воспроизводит входное воздействие, изменяющееся с постоянным ускорением (постоянное значение второй производной воздействия) и в результате устанавливается постоянная ошибка, а установившиеся ошибки от предшествующих постоянных производных воздействия равны нулю, то это система с астатизмом второго порядка Рис.2.53в.
В общем случае — порядок астатизма следящей системы относительно рассматриваемого воздействия равен наивысшему порядку постоянной производной воздействия, при котором установившаяся ошибка постоянна, а установившиеся ошибки, вызванные предшествующими постоянными производными этого воздействия, равны нулю.
Таким образом, чем выше порядок астатизма, тем выше динамическая точность системы в установившемся движении.
Важно, что понятие «порядок астатизма» распространяется только на установившуюся динамическую ошибку, вызванную конкретным воздействием. Если к системе приложено несколько воздействий, то порядок астатизма относительно каждого из них свой собственный.
Приведенные выше определение порядка астатизма лежит в основе его экспериментального определения (экспериментальный признак порядка астатизма)
Порядок астатизма системы можно установить аналитическим способом.
Аналитические признаки порядка астатизма
1.Структурный признак
Если воздействия приложены в прямом тракте структуры системы, то порядок астатизма равен количеству интегрирующих звеньев, расположенных в тракте передачи сигнала от координаты ошибки до рассматриваемого воздействия.
2. По передаточной функции ошибки.
Определяется количеством нулевых корней в числителе ПФ ошибки относительно рассматриваемого воздействия
3. По ЛАХ ошибки относительно отдельного воздействия
Порядок астатизма равен положительному индексу наклона первой асимптоты ЛАХ ошибки.
Аналитическое доказательство порядка астатизма связано с теоремой преобразования Лапласа о конечном значении оригинала.
Рассмотрим это доказательство на отдельных примерах
1. Пусть ПФ следящей системы, замкнутой по положению в пространстве, в разомкнутом состоянии имеет вид
ЛАХ разомкнутой системы и ЛАХ ошибки относительно входного воздействия на Рис.2.54.
ПФ ошибки относительно входного управляющего воздействия опишется выражением:
Определим установившуюся ошибку, воспользовавшись теоремой о конечном значении оригинала (свойство преобразования Лапласа):
При ступенчатом воздействии на входе
a — постоянная величина
получаем:
Выражение показывает, что в системе существует постоянная установившаяся ошибка, пропорциональная величине постоянного входного воздействия. Система является статической в отношении входного воздействия (нулевой порядок астатизма) (Рис.2.55). Коэффициент пропорциональности, между ошибкой и воздействием называют коэффициентом ошибки по нулевой производной воздействия (в конкретном случае- по положению). В инженерной практике следящих приводов величину обратную ему принято называть добротностью по положению. Смысл такого понятия в том, что чем выше добротность по положению, тем меньше установившаяся ошибка отработки следящей системой заданного положения.
Аналитические признаки порядка астатизма подтверждают полученный результат:
-в структуре системы отсутствуют интегрирующие звенья в канале связи ошибки и воздействия ;
— в числителе ПФ ошибки отсутствуют нулевые корни;
— ЛАХ ошибки имеет первую асимптоту с индексом наклона -0.
Оценим порядок астатизма относительно входного воздействия в системе, ПФ которой в разомкнутом состоянии имеет вид:
ПФ ошибки относительно входного воздействия имеет вид:
ЛАХ разомкнутой системы и ЛАХ ошибки от входного воздействия показаны на Рис.2.56.
Установившаяся динамическая ошибка относительно заданного положения равна:
При входном воздействии, изменяющемся с постоянной скоростью:
Установившаяся ошибка равна:
Согласно определению порядка астатизма, данная система относительно входного воздействия имеет первый порядок астатизма
Коэффициент пропорциональности между величиной ошибки и значением скорости воздействия называется коэффициентом ошибки по скорости воздействия. В инженерной практике следящих приводов обратную величину называют добротностью по скорости. В такой системе добротность по скорости равна коэффициенту передачи разомкнутой системы. Такая оценка ошибки может быть использована для определения коэффициента передачи разомкнутой системы в эксперименте с замкнутой системой.
Используем аналитические признаки порядка астатизма:
1.В структуре системы между координатой ошибки и воздействием имеется одно интегрирующее звено.
2.ПФ ошибки содержит в числителе один нулевой корень.
3.ЛАХ ошибки имеет первую асимптоту (Рис.2.56) с индексом наклона «+1».
Процессы динамической ошибки при различных воздействиях приведены на Рис.2.57 и Рис.2.58
Рассмотрим возможность повышения порядка астатизма. Согласно структурному признаку астатизма порядок его определяется количеством интегрирующих звеньев в канале между воздействием и координатой ошибки. Введем в прямую цепь системы (в ее управляющую часть), реализованное в электронном виде, дополнительное звено и проанализируем результат. ЛЧХ такой системы (Рис.2.59) показывают, что запас устойчивости в такой системе отсутствует. Система неустойчива. Поэтому такой способ повышения порядка астатизма входит в острое противоречие с задачей обеспечения необходимого запаса устойчивости.
Рассмотрим возможность компромиссного решения.
Введем в прямой канал системы звено с ПФ (Рис.2.60):
Простейшая реализация такого звена — параллельное соединением интегратора (с коэффициентом) , с пропорциональным звеном с коэффициентом равным единице («изодромный» блок , ячейка Боднера).
Тогда ПФ разомкнутой системы определяется выражением:
ПФ ошибки имеет вид:
где
ЛАХ разомкнутой системы и ЛАХ ошибки от входного воздействия показаны на Рис.2.61. Система имеет достаточный запас устойчивости. Проанализируем точность в установившемся движении.
Выражения для установившихся динамических ошибок от постоянного входного воздействия:
Ошибка, вызванная входным воздействием, изменяющимся с постоянной скоростью:
.
Установившаяся ошибка от воздействия, изменяющегося с постоянным ускорением:
Система имеет второй порядок астатизма относительно входного воздействия.
Коэффициент пропорциональности между установившейся ошибкой и значением ускорения называется коэффициентом ошибки по ускорению. Величина обратная ему – называют добротностью по ускорению. Изменения динамической ошибки показаны на Рис,2.62.
Это подтверждается и тем, что в тракте между координатой ошибки и воздействием содержится два интегрирующих звена .ПФ ошибки имеет в числителе два нулевых корня. ЛАХ ошибки относительно воздействия имеет первую асимптоту с индексом наклона «+2
Физическая причина появления нулевой ошибки в системе управления
Отсутствие установившейся ошибки системы, в рассматриваемых режимах движения, не противоречит принципу ее функционирования и физически реально.
Причина данного явления — в операции интегрирования сигнала (в динамике интегрирующего звена), расположенного в тракте между сигналом ошибки и воздействием и обладающего свойством запоминания (накопления) входной информации.
Так, например, в системе с астатизмом второго порядка, при движении с постоянной скоростью, после завершения переходного процесса, при отсутствии на входе интегратора сигнала ( ноль ошибки), его выходной сигнал не равен нулю и соответствует такому постоянному сигналу на входе последующей части, при котором скорость вращения полезной нагрузки системы равна скорости входного воздействия.
Таким образом, интегрирующие звенья, расположенные в прямом тракте системы, при определенных воздействиях, могут формировать сигналы управления исполнительным устройством системы, обеспечивающим его установившееся движение, при отсутствии сигнала ошибки.
Возможности повышения порядка астатизма относительно основных воздействий.
Проведенный анализ показывает, что введение дополнительных звеньев, реализующих эффект частично интегрирования (их называют блоками повышения астатизма) есть путь повышения динамической точности системы в установившемся движении.
Повышение порядка астатизма относительно входного воздействия можно совместить с повышением порядка астатизма относительно нескольких возмущающих воздействий системы, расположенных в прямом канале. В соответствии со структурным признаком порядка астатизма, при введении блока повышения астатизма в прямой канал системы, должен повышаться астатизм относительно всех возмущений этого канала, расположенных между сигналом ошибки и рассматриваемыми возмущениями.
Поэтому, если в канале системы между ошибкой и воздействием имеется несколько воздействий, то для повышения астатизма относительно всех воздействий, такие блоки необходимо вводить в структуру системы как можно ближе к источнику сигнала ошибки ( Рис.2.63) — то есть к измерителю разности между входной и выходной переменными системы.
Если возмущение, расположено в канале глубокой отрицательной обратной связи (например дрейф нуля на выходе усилителя датчика обратной связи), то при введении таких блоков в прямую цепь системы ( до точки приведения возмущения в прямую цепь структуры) астатизм повышается и относительно него (Рис.2.64).
В том случае, если в системе возмущение действует в канале корректирующей отрицательной обратной связи (например, дрейф нуля на выходе усилителя датчика обратной связи), то введение последующего дифференцирования этого сигнала в области низких частот также повышает порядок астатизм относительно него.
Пусть в управляющей части структуры расположено пропорциональное звено.
При реализации желаемой ЛАХ типа 1.2.1, в канале датчика скорости — в обратной связи вводится реальный дифференциатор с ПФ вида
.
Иллюстрацией такого решения является структура, показанная на рис.2.65 и ЛАХ на Рис.2.66. В этом случае, после приведения возмущения к сигналу ошибки, как показано, — в канале этого возмущения, содержится элемент дифференцирования. В числителе ПФ ошибки относительно данного возмущения появляется нулевой корень. Система имеет первый порядок астатизма относительно данного воздействия.
Если добавить в управляющую часть системы блок повышения астатизма относительно входного воздействия, то астатизм относительно данного возмущения можно увеличить до второго порядка.
Выводы
1.Анализ ЛАХ ошибки относительно входного воздействия показывает, что, при повышении порядка астатизма, расширяется вся «область усиления» ЛАХ разомкнутой системы и, следовательно, уменьшается ошибка не только от воздействий, имеющих вид постоянных производных, но и от воздействий произвольного вида, спектр которых лежит в границах этой области.
2. Повышение порядка астатизма находится в конфликте с качеством переходного процесса ( уменьшается запас устойчивости). В ряде случаев, непосредственное введение интегратора в прямую цепь системы делает ее неустойчивой. Компромиссное решение возможно при использовании интегрирования, ограниченного диапазоном низких частот (с помощью рассмотренных блоков повышения астатизма).
3. Для повышения порядка астатизма относительно нескольких возмущений блоки повышения астатизма должны располагаться как можно ближе к источнику сигнала ошибки.
Лекция 2.7 Динамическая точность в установившемся движении при произвольных медленно — изменяющихся воздействиях.
Содержание:
— ряд установившейся динамической ошибки следящей системы и коэффициенты ошибки;
-вычисление коэффициентов ошибки;
— коэффициенты ошибки для типовых желаемых ПФ разомкнутой системы;
— связь коэффициентов ошибки с ЛАХ разомкнутой системы;
-условие ограничение ряда ошибки минимально-допустимым количеством членов, соотношение между частой среза разомкнутой системы и максимальной частотой спектра воздействия.
Ряд установившейся динамической ошибки следящей системы и коэффициенты ошибки
Рассматривается метод исследования вынужденной установившейся динамической ошибки системы при воздействиях, имеющих произвольный вид, но ограниченных по быстроте изменения.
Такой метод является особенно важным для проектирования таких систем, в которых требования к динамической точности в основном режиме работы, связаны с установившимся движением, а время затухания переходной ошибки намного меньше полного времени процесса регулирования (САС, системы наведения).
Физическое ограничение быстроты изменения воздействия определяется практическим ограничением амплитудного спектра воздействия некоторой частотой .
Если данная частота меньше полосы пропускания системы (приближенно ее можно оценить частотой среза разомкнутой системы), то такое произвольное воздействие называют медленно-изменяющимся.
При выполнении данного условия вынужденную установившуюся динамическую ошибку системы можно приближенно описать с помощью сходящегося ряда.
Возможность такого описания установившейся динамической ошибки следует из разложения в ряд передаточной функции ошибки в окрестности нуля ( при «s» ):
При этом изображение динамической ошибки также представляется в виде ряда:
Переходя к оригиналу, получаем:
Коэффициенты разложения в ряд установившейся ошибки системы называют коэффициентами ошибки. Нумерация коэффициентов ошибки совпадает с порядком производной воздействия.
Рассматриваемое описание установившейся ошибки распространяется на любое возмущение произвольного вида, воздействующего на систему, если его спектр ограничен полосой пропускания контура, охватывающего его.
Рассматриваемое представление вынужденной динамической ошибки системы дает еще один признак астатизма системы относительно некоторого воздействия.
Так ряд ошибки показывает, что, если при наличии некоторой постоянной производной воздействия, величина соответствующего этой производной коэффициента ошибки отлична от нуля, а все предшествующие коэффициенты ошибки равны нулю, то порядок астатизма системы равен номеру этого коэффициента ошибки.
Например, при астатизме третьего порядка :
Порядок астатизма равен количеству первых коэффициентов ошибки равных нулю.
Вычисление коэффициентов ошибки
В общем случае для вычисления коэффициентов ряда вынужденной установившейся ошибки можно воспользоваться общей формулой коэффициентов ряда Маклорена. Однако такой путь приводит к громоздким выражениям.
Эффективна вычислительная процедура, предложенная Кингом Л.Г и, доведенная до удобного практического применения, проф. Терсковым В.Г.
Так, если выражение для разложения в ряд передаточной функции имеет вид:
то коэффициенты ошибки можно определить с помощью пределов рекуррентных выражений:
K=
и т.д
Проф. Терсковым В.Г. показано, что если ПФ ошибки представлена в виде отношения полиномов:
,
то применение рекуррентных формул Кинга Л.Г приводит к следующим выражениям :
и т.д
Коэффициенты ошибки для типовых желаемых ПФ разомкнутой системы
Существенно, что при решении задач проектировании системы , важен не только факт сходимости ряда ошибки, но и быстрота его сходимости. При достаточной быстроте сходимости ряда появляется возможность ограничить представление динамической ошибки системы минимально-возможным количеством слагаемых. Это зависит от двух факторов: во — первых от быстроты уменьшения собственно коэффициентов ошибки, и во- вторых от быстроты уменьшения производных воздействия (от динамики воздействия).
Исследуем возможности первого фактора.
Рассмотрим коэффициенты ошибки для систем с типовыми желаемыми ПФ (ЛАХ) разомкнутой системы.
1. Система с типовой ЛАХ вида 1.1.1. ( Рис. 2.67.) (характерна для система низкой точности)
Пусть ПФ разомкнутой системы имеет вид:
ПФ ошибки относительно входного воздействия имеет вид:
Применяя формулы для коэффициентов ошибки, получаем:
При выполнении требования к достаточности запаса устойчивости по фазе , справедливы следующие соотношения:
;
Тогда получаем:
Выражения для коэффициентов ошибки показывают, что скорость уменьшения коэффициентов ошибки определяется частотой среза разомкнутой системы.
2. Система с типовой ЛАХ 1.2. (Рис.2.68) ( система средней точности)
ПФ разомкнутой системы имеет вид:
ПФ ошибки относительно входного воздействия:
Коэффициенты ошибки:
После упрощения выражений для последующих коэффициентов ошибки , получаем:
Выражения показывают, что скорость уменьшения коэффициентов ошибки, начиная с коэффициента (назовем эти коэффициенты — старшими коэффициентами ошибки) — определяется сопрягающей частотой первого положительного излома ЛАХ. Величина этой скорости (при одинаковой частоте среза) меньше скорости убывания коэффициентов ошибки по сравнению с системой, имеющей ЛАХ типа 1.1.1.
3.Система с типовой ЛАХ 1.3.1 (Рис.2.69)(система повышенной точности)
ПФ разомкнутой системы имеет вид:
ПФ ошибки относительно управляющего воздействия:
Коэффициенты ошибки:
После упрощения выражений для старших коэффициентов ошибки, получаем:
……….
Выражения показывают, что скорость уменьшения старших коэффициентов ошибки, (начиная с и выше), определяется половиной сопрягающей частоты положительного излома ЛАХ ( то есть, при такой же частоте среза, меньше, чем в предыдущем варианте).
Полученные результаты, показывают, что с ростом «области усиления» ЛАХ разомкнутой системы ( область низких частот) скорость убывания коэффициентов ошибки уменьшается и для ее оценки требуется большее количество слагаемых ряда.
Как было указано выше, быстрота сходимости ряда зависит не только от быстроты уменьшения коэффициентов ошибки, которая определяется фактически полосой пропускания системы, но и от быстроты уменьшения производных воздействия (или, в частотной области от ширины спектра воздействия), а, практически, от близости значений полосы пропускания системы и максимальной частоты спектра воздействия. При этом, полоса пропускания системы считается достаточной (в смысле ее минимально-возможного значения), если установившаяся динамическая ошибка, определяется с необходимой точностью, только младшими коэффициентами ошибки.
Связь коэффициентов ошибки с ЛАХ разомкнутой системы
Рассмотрим выполнение этого условия для типовых желаемых ЛАХ разомкнутой системы и соответствующих им ЛАХ ошибки от входного воздействия.
Возьмем, в качестве примера, желаемой характеристики разомкнутой системы типовую ЛАХ 1.2.1
В области низких частот ЛАХ ошибки является зеркальным отображением ЛАХ разомкнутой системы (Рис.2.70)
Первая асимптота ЛАХ разомкнутой системы определяется выражением:
Обратная ей , выражением:
Следовательно, пересечение первой асимптоты ЛАХ ошибки с осью частот дает значение первого коэффициента ошибки, а положение асимптоты ограничивает низкочастотную область ЛАХ ошибки до частоты .
Вторая асимптота ЛАХ разомкнутой системы определяется приближенным выражением:
Обратная ей асимптота ЛАХ ошибки приближенно описывается выражением:
В точке пересечения асимптоты с осью частот:
получаем:
Таким образом, первая и вторая асимптоты ЛАХ ошибки (определяемые младшими коэффициентами ошибки) практически полностью ограничивают всю «область усиления» ЛАХ разомкнутой системы.
Оценка ошибки для данного типа ЛАХ с помощью младших коэффициентов ошибки полностью гарантируется , если максимальная частота спектра воздействия не превышает значения ( выше было показано именно этот параметр определяет скорость уменьшения старших коэффициентов ошибки для данного типа ЛАХ).
Аналогичное исследование других типовых желаемых ЛАХ показывает :
— для системы с ЛАХ типа 1.1.1 область низкочастотного усиления разомкнутой системы ограничена единственной асимптотой, определяемой первым коэффициентом ошибки, обратным частоте среза, соответствующая ЛАХ ошибки показана на Рис.2.71 Поэтому условие достаточности частоты среза практически выполняется, если диапазон частот спектра воздействия, ограниченный значением не превышает ( выше было показано, что именно этот параметр определяет скорость уменьшения старших коэффициентов ошибки для данного типа ЛАХ).
— для желаемой ЛАХ типа 1.3.1 первый и третий коэффициенты ошибки ограничивают низкочастотную область асимптотической ЛАХ ошибки системы ( второй коэффициент ошибки ограничивает точное значение характеристики в точке пересечения первой и второй асимптот) (Рис.2.72) Условие достаточности полосы пропускания требует, чтобы максимальная частота спектра воздействия не превышала частоты ( выше было показано, что именно этот параметр определяет скорость уменьшения старших коэффициентов ошибки для данного типа ЛАХ).
Условие ограничение ряда ошибки минимально-допустимым количеством членов, соотношение между частой среза разомкнутой системы и максимальной частотой спектра воздействия
Выше показано, что скорость уменьшения старших коэффициентов ошибки определяет максимально допустимое значение физической границы спектра воздействия, при которой установившаяся ошибка системы может полностью характеризоваться только младшими коэффициентами ошибки.
Таким образом, окончательно , получаем :
— для системы с желаемой ЛАХ типа 1.1.1 установившаяся ошибка системы может оцениваться выражением:
— для системы с желаемой ЛАХ типа 1.2.1 :
— для системы с желаемой ЛАХ типа 1.3.1 :
На Рис.2.73 показаны типовые ЛАХ ошибки системы для заданного значения при выполнении условия достаточности полосы пропускания. Они показывают, что переход к ЛАХ с большей областью усиления контура минимально допустимая полоса пропускания системы также увеличивается.
Укажем, что полученные оценки значений допустимых параметров следящей системы (частоты среза, частоты) предполагают знание физической границы амплитудного спектра воздействия. Это порождает неопределенность в решении задачи, так как предполагает наличие представления о том, какими высокочастотными составляющими спектра воздействия можно, с достаточной для решения точностью, пренебречь.
Лекция 2.8 Расчет желаемых частотных характеристик следящей по требованиям к запасу устойчивости и динамической точности при воспроизведении регулярного медленно-изменяющегося воздействия.
1. Определение минимального значения полосы пропускания
Как было показано выше, определение минимально-возможного значения «полосы пропускания» системы при воспроизведении медленно-изменяющегося воздействия сводится к возможности оценки установившейся динамической ошибки только младшими коэффициентами ряда ошибки.
При оценке такой возможности, в частотной области, показано, что это выполняется, если скорость уменьшения коэффициентов ошибки, жестко связанная с полосой пропускания системы, больше значения частоты, являющейся физической границей амплитудного спектра воздействия.
Однако, полученный теоретический результат практически, при выборе минимальной полосы пропускания системы, использовать затруднительно, в связи с неопределенностью оценки физической границы спектра воздействия .
Практическое решение находится при исследовании быстроты сходимости ряда ошибки в области времени.
Для практической гарантии надежности этого решения, исследуем быстроту сходимости ряда составленного из максимальных значений его слагаемых ,взятых по модулю:
Такой ряд дает гарантированное решение, допуская предельную ситуацию , в которой все производные воздействия одновременно максимальны и суммируются по модулю.
Оценим необходимую быстроту сходимости ряда ошибки для наиболее часто применяемых типовых характеристик следящей системы.
1. Типовая желаемую ЛАХ вида 1.2.1.
Пусть ей соответствует (в качестве примера) ПФ вида:
Как было показано выше, условие достаточности полосы пропускания для системы с данной типовой характеристики требует выполнения соотношения:
В этом случае установившаяся ошибка может определиться только двумя первыми коэффициентами ошибки:
Практическая реализация такой оценки установившейся ошибки в области времени соответствует ее описанию таким рядом, в котором старшие слагаемые ряда ошибки (начиная с третьего) будут настолько быстро убывать, чтобы их можно было не учитывать. Реально, такая быстрота убывания слагаемых ряда, обеспечивается, если выполняется следующее условие:
где
последняя составляющая ограниченного ряда (определяется последним младшим коэффициентом ошибки);
составляющая ряда ошибки через одну после последней составляющей ограниченного ряда-
Используя, выше полученную связь между старшими коэффициентами ошибки для данной типовой характеристики,:
получаем:
;
Используя условие равенства в соотношении максимальных составляющих ряда, получаем :
, откуда следует :
Для примера рассмотрим типовой закон изменения угла линии визирования при движении ЛА и объекта на параллельных траекториях при постоянной скорости.
Для такого закона входного воздействия существуют точные значения модулей максимумов всех необходимых производных, выраженных через параметр «с».
Так:
Используя, приведенные оценки производных воздействия для типовой ЛАХ 1.2.1 получаем:
Для типовой характеристики 1.1.1 получаем.
Выше полученное требование в частотной области
Обеспечивает описание установившейся ошибки рядом:
Реализуя требование к быстроте сходимости ряда и выражение для старших коэффициентов ошибки:
Получаем
;
для рассматриваемого примера типового воздействия при :
;
Получаем
Данное выражение определяет минимальное значение частоты среза разомкнутой системы.
Рассмотрим типовую желаемую ЛАХ для системы повышенной точности 1.3.1 :
Пусть ПФ разомкнутой системы имеет вид:
Условие минимума частоты в частотной области имеет вид:
При этом установившаяся ошибка может быть описана выражением:
Необходимая скорость сходимости ряда ошибки в этом случае задается соотношением:
Используя выше полученную зависимость для старших коэффициентов ошибки :
приходим к выражению:
для примера типового закона изменения воздействия, получаем:
Таким образом, располагая аналитическим описанием воздействие и выбрав тип желаемой характеристики, можно определить минимально-необходимое значение частоты , а также связанное с ней требованием запаса устойчивости, значение частоты среза желаемой ЛАХ разомкнутой системы. Данное решение является первым этапом формирования желаемой ЛАХ системы, реализующим выполнение необходимого условия для ее дальнейшего синтеза. Вторым этапом полного решения задачи синтеза желаемой ЛАХ, является выполнение достаточного условия, обусловленного требованием обеспечения допустимой динамической ошибки системы.
2.Расчет желаемых характеристик
Рассмотрим особенности этапа формирования желаемых частотных характеристик, на простейшем примере решения такой задачи , при следующих условиях:
1.Формируется типовая желаемая ЛАХ разомкнутого контура единичной обратной связи
2.Система линейна и параметры постоянны ( ограничения переменных в процессе движения не проявляются);
3. Входное воздействие относится к типу медленно-изменяющегося воздействия произвольного вида. Закон изменения входного воздействия аналитически определен.
4.Требования к качеству заданы в виде значения допустимой ошибки слежения в установившемся режиме слежения — ( расчетный момент времени, соответствующий наиболее интенсивной динамике воздействия) на рабочем интервале времени и требуемого значения показателя колебательности .
5. Данные требования должны быть обеспечены при минимально-возможном значении частоты среза и «области усиления» разомкнутого контура
Последовательность расчета типовой желаемой ЛАХ типа 1.2.1 (система средней точности)
Тогда уравнение, определяющее достаточные условия реализации требований для ПФ типа 1.2.1, имеет вид:
Приведем данное уравнение к уравнению с одним неизвестным.
Для данного типа АЧХ в окрестности частоты среза можно воспользоваться упрощенным выражением:
Откуда получаем выражения, связывающее низкочастотные параметры ЛАХ и коэффициенты ошибки :
Откуда получаем:
K=
Полученные соотношения, позволяют рекомендовать следующую последовательность расчета желаемой ЛАХ:
1. Определение
2. Расчет
3. Расчет
4. Расчет
5. Расчет К
Если , то расчет завершен.
Если , то вычисляется новое граничное значение (используется достаточное условие ее определения по требованию точности). В частном случае из условия обращения в ноль знаменателя полученного выражения (соответствует условию появления ЛАХ 2.2.1), получаем:
Откуда следует :
.
Затем принимается значение , и процедура расчета повторяется.
6. При ограничении коэффициента передачи (допустимым максимальным значением ) — из расчетного уравнения, при выполнении условия , определяется соответствующие значения и Если эти значение так высоки, что их сложно реализовать (с учетом исходной динамики системы), то выполняется переход к другому типу ЛАХ (например 1.3.1)
7. Построение желаемой ЛАХ.
При построении желаемой ЛАХ удобно принять следующую последовательность:
— сначала выполняется построение среднечастотного участка желаемой ЛАХ:
— выполняется построение низкочастотной асимптоты с наклоном -2;
— выполняется построение первой низкочастотной асимптоты с наклонно-1
— точка пересечения первой и второй асимптоты дает значение постоянной времени . Последовательность построения желаемой ЛАХ иллюстрирована на Рис.2.74
8. После выполнения расчета проводится цифровое моделирование системы с полученной расчетной ПФ желаемой разомкнутой системы для всего интервала времени и по результатам моделирования оценивается максимальная ошибка наведения. В случае отличия ее допустимого значения уточняются параметры расчетной желаемой ЛАХ.
Последовательность расчета типовой желаемая ЛАХ 1.3.1 (система высокой точности)
ЛАХ типа 1.31 изображена на Рис.2.75 Ей соответствует ПФ:
Выше получено выражение для минимально-необходимого значения , реализация которого позволяет описать установившуюся ошибку с помощью трех младших коэффициентов ряда
Расчетное уравнение при требовании к допустимой ошибке имеет вид:
Для принятой типовой ЛАХ справедливы следующие соотношения :
;
Выше были получены максимальные оценки коэффициентов ошибки
Используя выражение для , получаем
Откуда следует:
Подставляя, выражения коэффициентов ошибки в исходное уравнение приходим к
к уравнению с одним неизвестным (K) :
Алгоритм расчета:
1. Определяется
2. Рассчитывается
3. Рассчитывается
4. Рассчитывается
5. Рассчитывается К
Если , то выполняется процедура оптимизации аналогичная приведенной выше для типовой ЛАХ 1.2.1
6. Построение желаемой ЛАХ выполняется в той же последовательности, что и для типа 1.2.1.
7. Проводится цифровое моделирование с желаемой ПФ и уточняются параметры
6.1. Определения коэффициента ошибок
6.2. Математическое выражение коэффициента битовых ошибок
6.3. Нормы на параметры ошибок систем передачи
6.4. Принципы построения измерителей ошибок
6.5. Техника измерения коэффициента ошибок
6.1. Определения коэффициента ошибок
Коэффициент ошибок – важнейшая характеристика линейного тракта. Он измеряется как для отдельных участков регенерации, так и для тракта в целом. Определяется коэффициент ошибок kОШ, по формуле:
kОШ = NОШ /N, (6.1)
где N – общее число символов, переданных за интервал измерения; NОШ – число ошибочно принятых символов за интервал измерения.
Измерение коэффициента ошибок носит статистический характер, так как получаемый за конечное время результат является случайной величиной. Относительную погрешность измерения в случае нормального закона распределения числа ошибок, что допустимо при N≥10, можно определить по формуле:
 . (6.2)
. (6.2)
Здесь ![]() — коэффициент, зависящий от доверительной вероятности результата измерений:
— коэффициент, зависящий от доверительной вероятности результата измерений:
![]() , (6.3)
, (6.3)
где ![]() — обратная функция интеграла вероятности
— обратная функция интеграла вероятности ![]() :
:
![]() . (6.4)
. (6.4)
Значение kОШ позволяет оценивать вероятность ошибки pОШ – количественную оценку помехоустойчивости. Область возможных значений оценки, в которой с заданной доверительной вероятностью будет находиться значение pОШ, определяется верхней (pВ) и нижней (pН) доверительными границами. При нормальном законе распределения числа ошибок значения pВ и pН определяются по формулам:
![]() , (6.5)
, (6.5)
![]() , (6.6)
, (6.6)
Очевидно, что точность оценок вероятности ошибки и коэффициента ошибки растет с увеличением N. Общее число символов цифрового сигнала, переданных за интервал измерения T, зависит от скорости передачи B: N = TB. Отсюда следует, что чем больше скорость передачи, тем быстрее и точнее можно оценить коэффициент ошибок.
6.2. Математическое выражение коэффициента битовых ошибок
Определим коэффициент битовых ошибок для реальных приёмников, которым свойственно наличие различных источников шумов. При этом будем считать, что приёмник принимает решение, какой бит (0 или 1) был передан в каждом битовом интервале путем стробирования фототока. Очевидно, что из-за наличия шумов данное решение может быть неверным, что приводит к появлению ошибочных битов. Поэтому, чтобы определить коэффициент битовых ошибок, необходимо понять, каким образом приемник принимает решение относительно переданного бита.
Обозначим через I1 и I0 фототоки, стробированные приемником в течение 1 и 0 битов, соответственно, а через s12 и s02 соответствующие шумы. Принимая, что последние имеют гауссовское распределение, проблема установления истинного значения принятого бита имеет следующую математическую формулировку. Фототок для битов 1 и 0 является выборкой гауссовской переменной со средним значением I1 и вариацией s1, а приёмник должен отслеживать этот сигнал и решать, является ли переданный бит 0 или 1. При этом существует много возможных правил принятия решения, которые могут быть реализованы в приёмнике с целью минимизации коэффициента битовых ошибок. Для значения фототока I этим оптимальным решением является наиболее вероятное значение переданного бита, которое определяется путём сравнения текущего значения фототока с пороговым значением Iп, используемым для принятия решения.
Рисунок 6.1. Функция плотности вероятности фототока принятых сигналов
Пусть при I ³ Iп принимается решение о том, что был передан бит 1, в противном случае – бит 0. Когда биты 1 и 0 равновероятны, что и рассматривается в дальнейшем, пороговый ток приблизительно равен:
![]() (6.7)
(6.7)
Геометрически Iп представляет собой значение тока I, для которого две кривые плотности вероятностей (рис. 6.1) пересекаются.
Вероятность того, что I < Iп, т. е. вероятность ошибки при передаче бита 1, обозначим через Р0,1, а вероятность решения для переданного бита 1, когда I ³ Iп при переданном 0, обозначим Р1,0.
Пусть Q(х) обозначает вероятность того, что нулевая средняя вариация гауссовской переменной превышает значение х, тогда:
 (6.8)
(6.8)
а
 (6.9)
(6.9)
а
 (6.10)
(6.10)
Можно показать [14], что BER определяется,
 (6.11)
(6.11)
Очень важно отметить, что в ряде случаев эффективным является использование изменяемого в зависимости от уровня сигнала порога принятия решения, как, например, шума оптического усилителя. Многие высокоскоростные приёмники обладают такой особенностью. Однако более простые приемники имеют порог, соответствующий среднему уровню принимаемого тока, а именно (I1 + I0)/2. Такая настройка порогового значения дает большой коэффициент битовых ошибок, определяемый выражением [14].
 (6.12)
(6.12)
Выражение (6.11) можно использовать для оценки BER, когда известны как мощность полученного сигнала, соответствующего битам 0 и 1, так и статистика шумов.
6.3. Нормы на параметры ошибок систем передачи
Битовые ошибки являются основным источником ухудшения качества связи, проявляющегося в искажении речи в телефонных каналах, недостоверности передачи информации или снижении пропускной способности передачи данных, и характеризуются статистическими параметрами и нормами на них, которые определены соответствующей вероятностью выполнения этих норм. Последние делятся на долговременные и оперативные нормы, первые из которых определяются рекомендациями ITU-T G.821 и G.826, а вторые – М.2100, М.2110 и М.2120, при этом, согласно М.2100, качество цифрового тракта по критерию ошибок делят на три категории:
- нормальное – BER < 10-6;
- пониженное – 10-6 ≤ BER < 10-3 (предаварийное состояние);
- неприемлемое – BER ≥ 10-3 (аварийное состояние).
Так как появление ошибок является следствием совокупности всех текущих условий передачи цифровых сигналов, имеющих случайный характер, то при отсутствии данных о законе распределения ошибок его отдельные элементы могут быть определены с определенной степенью достоверности только по результатам продолжительных измерений. В то же время на практике необходимо, чтобы значения параметров ошибок для ввода в эксплуатацию и технического обслуживания систем передачи основывались на достаточно коротких интервалах времени измерения. Исходя из этого, были определены следующие параметры ошибок [14]:
- секунда с ошибками (error second, ES) – односекундный интервал, содержащий хотя бы один ошибочный бит;
- секунда, пораженная ошибками (severely error second, SES) – односекундный интервал с BER ≥ 10-3.
Данные параметры ошибок должны оцениваться в течение времени готовности (available time), отсчет которого начинается с первой секунды из десяти следующих друг за другом секунд, в каждой из которых BER<10-3. ITU-T M.2100 регламентирует нормы качества (performance objectives, PO) на выраженные максимальным процентом времени параметры ошибок, которые зависят только от скорости передачи и приводятся для условного эталонного соединения (hypothetical reference connection, HRC/HRX/) длиной 27500 км. При этом нормы качества распределяются по участкам соединения соответствующей категории качества. В качестве эталонной модели такого распределения принимается участок высокой категории качества протяженностью 25000 км, которому присваивается 40% от общей нормы качества на параметры ошибок передачи точка-точка, что в пересчете на 1 км, дает 0.0016 %/км.. Остальные 4 участка (2 среднего качества и 2 с приемлемым качеством) длиной 2 х 1250 км расположены по обе стороны от центрального. Поэтому распределение, пропорциональное протяженности L км тракта высокой категории качества, будет определяться, как
AL = 0.0016 · L %/км. (6.13)
Нормы качества на цифровые тракты и каналы подразделяются на настроечные и эксплуатационные, причем вводимые в эксплуатацию впервые или после проведения корректирующих действий они должны сдаваться по настроечным нормам качества, а в процессе эксплуатации должны соответствовать эксплуатационным нормам. Обычно [105] эксплуатационная норма представляется в виде эталонной нормы качества (reference performance objective, RPO)
RPO = A · T · PO, (6.14)
а настроечная, включающая запас на старение, используемая при вводе в эксплуатацию (bringing into service objective, BISO), определяется, как половина RPO, т.е.
BISO = RPO/2. (6.15)
Здесь PO – норма качества оцениваемого параметра, а T = 86400 с (одни сутки) – продолжительность измерений (количество односекундных интервалов).
Для анализа результатов, полученных в процессе измерений, используются также предельные значения S1и S2 норм (рисунок 6.2), которые соответствуют числу событий (ES,SES) и определяются, как:
S1 = RPO/2 – D и S2 = RPO/2 + D, (6.16)
где D = 2![]() — дисперсия оцениваемого параметра.
— дисперсия оцениваемого параметра.
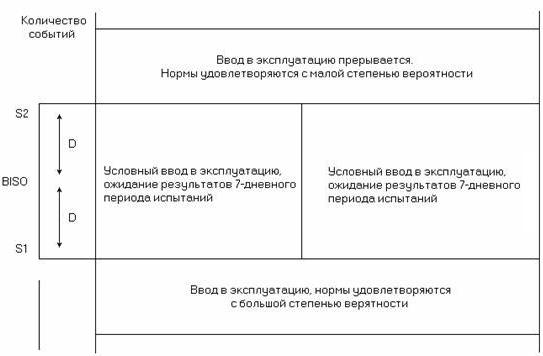
Рисунок 6.2. Предельные значения и условия ввода в эксплуатацию системы передачи
При соответствии результатов измерений норме S1 цифровой тракт может быть введен в эксплуатацию без всякого сомнения, а при превышении нормы S2 в обязательном порядке требуется повышение качества испытываемого цифрового тракта, т.е. должны быть проведены корректирующие действия с повторными измерениями. Если значение ES или SES лежит в интервале от S1 до S2, цифровой тракт может быть введен в эксплуатацию условно или временно с продолжением измерений в течение 7 суток. Данный подход к оценке качества цифровых систем передачи по параметрам ошибок позволяет сократить время измерений и получить норму цифрового тракта суммированием норм цифровых участков. При этом значения RPO, D, S1 и S2 выражаются в виде числа событий за установленный интервал времени, а не в виде процентов времени.
Для измерения коэффициента ошибок разработан ряд специальных BER анализаторов – измерителей коэффициента ошибок, включающих генераторы псевдослучайных и детерминированных последовательностей передаваемых кодированных символов, а также приемное оборудование, осуществляющее собственно измерение коэффициента ошибок. В случае посимвольного сравнения кодов измерение может быть выполнено с использованием шлейфа, т.е. путем измерения ошибок с одной оконечной станции при установке на противоположном конце шлейфа. Другой метод основан на выделении ошибок благодаря избыточности используемых кодов и используется для измерений от передающей до приемной сторон тракта или участка линии, т.е. когда выделение и фиксация ошибок производятся на ее приемном конце. Очевидно, что в первом случае требуется использование одного комплекта, а во втором – двух комплектов приборов. При этом измеренное значение коэффициента ошибок отражает качество передачи при прохождении сигнала в обоих направлениях и в каждом направлении соответственно.
6.4. Принципы построения измерителей ошибок
В зависимости от скорости передачи контролируемой системы передачи в анализаторе используются различные схемотехнические решения.
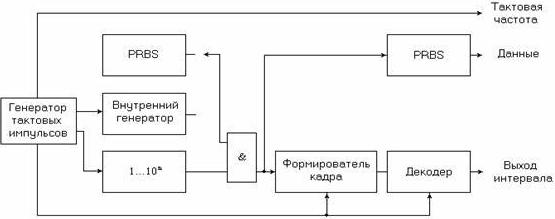
Рисунок 6.3. Генератор низкоскоростного BER анализатора
Низкоскоростной генератор тестовых кодов и детектор ошибок. Используемый в телекоммуникациях анализатор BER, состоящий [106] из генератора тестовых кодов и собственно анализатора ошибок, представлен на рисунках 6.3 и 6.4. Он предназначен для невысоких (до 200 Мбит/с) битовых скоростей, учитывая, что максимальные типовые скорости составляют 44.736 Мбит/с (DS3) в Северной Америке и 139.364 Мбит/с – за пределами Северной Америки.
PRBS с генератором кодовых групп, представленный на рис. 6.16, синхронизируется либо от источника тактового сигнала с фиксированной частотой (согласно G.703), либо от синтезатора, осуществляя тем самым изменение частоты синхронизации. В связи с этим использование данных средств требует задания некоторых определенных частот синхронизации и наличия возможности обеспечения их небольших смещений от ±15 до ±50 ppm. Для повторения тестовых кодов схема PRBS и генератор кодовых групп обычно имеют триггерную схему, управляющую либо выходным усилителем бинарных данных, который обеспечивает данные и данные с сопровождающим синхросигналом, либо выходную схему кодированных данных. Это позволяет создавать цикловую синхронизацию сигнала в соответствии с требованием, например, системы SONET/SDH. Кроме этого, данная схема способствует созданию соответствующего интерфейсного кода для эффективного восстановления тактовой синхронизации. Выходной усилитель обеспечивает необходимый уровень сигнала в соответствии со спецификацией электрического интерфейса, в том числе сигнала с чередованием полярности импульсов.
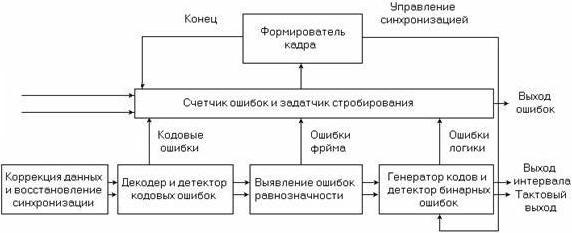
Рисунок 6.4. Низкоскоростной детектор ошибок
Детектор ошибок, показанный на рисунке 6.4, получает стандартный кодированный сигнал, восстанавливает генератор синхросигнала и устраняет кодирование для обеспечения бинарной даты и синхросигналов. Он обнаруживает любые нарушения алгоритма интерфейсного кода и посылает сигналы на счетчик ошибок, что составляет первый уровень процесса обнаружения ошибок. При работе с цикловыми сигналами приемник захватывает любой присутствующий элемент цикловой синхронизации, проверяет наличие цикловых ошибок и декодирует любые встроенные сигналы тревоги, или CRC биты, тем самым обеспечивая возможность измерения.
Наконец, бинарные данные и синхросигнал направляются на детектор ошибок и генератор эталонных тестовых кодов, которые проверяют полученный тестовый код бит за битом на предмет обнаружения логических ошибок. Временная база контролирует пропускание измерения для непрерывного, периодического и ручного режима. Накопленное количество ошибок обрабатывается для получения значения BER и анализа функционирования при наличии ошибок.
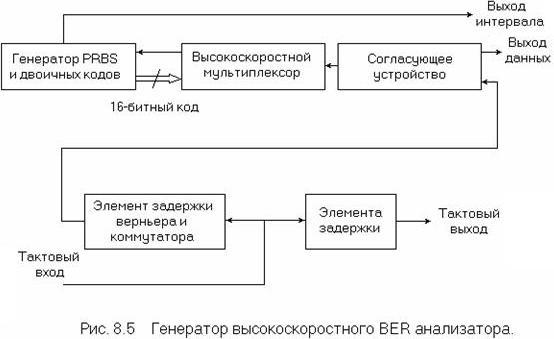
Высокоскоростной генератор тестовых кодов и детектор ошибок. На рисунках 6.5 и 6.6 показаны схемы [14] для 3 Гбит/с генератора тестовых кодов и детектора ошибок. Вследствие высокой битовой скорости генерация последовательных PRBS и кодовых групп на этой скорости не представляется целесообразной. Поэтому тестовые коды генерируются (рисунок 6.5) как параллельные 16-битные кодовые группы при максимальной скорости 200 Мбит/с, используя затем выполненные по биполярной технологии регистраторы смещения и высокоемкостную память. Высокоскоростные схемы обычно выполняются на основе арсенид-галлиевых логических схем, преобразующих параллельные данные в последовательный поток на скорости до 3 Гбит/с.
Согласно данной схеме, вход синхросигнала генерируется синтезатором частоты, согласующее устройство управляется через линию фиксированной задержки, а генератор тестовых кодов и выходной усилитель синхронизируются через схему дискретной и плавно изменяемой задержки, так что фаза синхросигнала/данных может изменяться как в положительном направлении, так и в отрицательном. Дискретные значения задержки составляют 250, 500 и 1000 пс, тогда как диапазон плавной задержки лежит в пределах от 0 до 250 пс с 1 пс инкрементом.
Корректор временной диаграммы, связанный с выходным усилителем, пересинхронизирует данные через триггер D типа для поддержания минимального фазового дрожания. Так как подобный тип тестового устройства обычно используется при проведении лабораторных измерений, выходные уровни синхросигнала и данных и постоянные смещения могут варьироваться для того или иного конкретного случая использования.
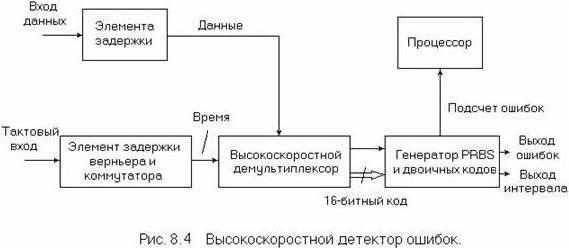
Детектор ошибок, показанный на рис. 6.6, имеет простое параллельное соединение, в связи с чем входы синхросигнала и данных проходят через схемы дискретной и плавной задержки, обеспечивая оптимальную настройку при обнаружении ошибок для любой фазы синхросигнала/данных. Действительно, путем настройки под контролем внутреннего процессора решающего порога и фазы синхросигнала условия функционирования детектора ошибок могут быть оптимизированы автоматически. Высокоскоростной демультиплексор преобразует последовательный поток данных в 16-битные параллельные кодовые группы наряду с поделенным на 16 синхросигналом. Параллельно соединенный генератор эталонных тестовых кодов синхронизируется с входными данными и осуществляет сравнение битов, поэтому любая ошибка фиксируется одним из двух счетчиков, первый из которых подсчитывает число ошибок, а второй – общее число битов. Процессор измерения обеспечивает анализ функционирования при наличии ошибок с разрешением до 1 мс.
6.5. Техника измерения коэффициента ошибок
Рассмотрим измерение коэффициента ошибок путем посимвольного сравнения и подсчета ошибочно принятых элементарных импульсов. Для этого вначале (перед измерением) на передающей станции с помощью оптического аттенюатора устанавливают заданный в технических условиях на аппаратуру линейного тракта уровень оптического излучения. Затем на передающем конце подключают генератор испытательных сигналов, а на приемном – измеритель коэффициента ошибок и, изменяя значения уровней средней мощности, измеряют коэффициент ошибок. Время измерения определяют в зависимости от скорости передачи, объема информации и значений коэффициента ошибок Кошi (BERi).
Коэффициент ошибок при заданном уровне оптического излучения вычисляют по формуле [14]
![]() (6.17)
(6.17)
где
![]() ,
,  , (6.18)
, (6.18)
где ![]() и
и ![]() — погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.
— погрешность и среднее значение коэффициента ошибок при пяти и более измерениях с интервалом 3 мин, соответственно, a — коэффициент, учитывающий наличие погрешности измерения при проведении n измерений.